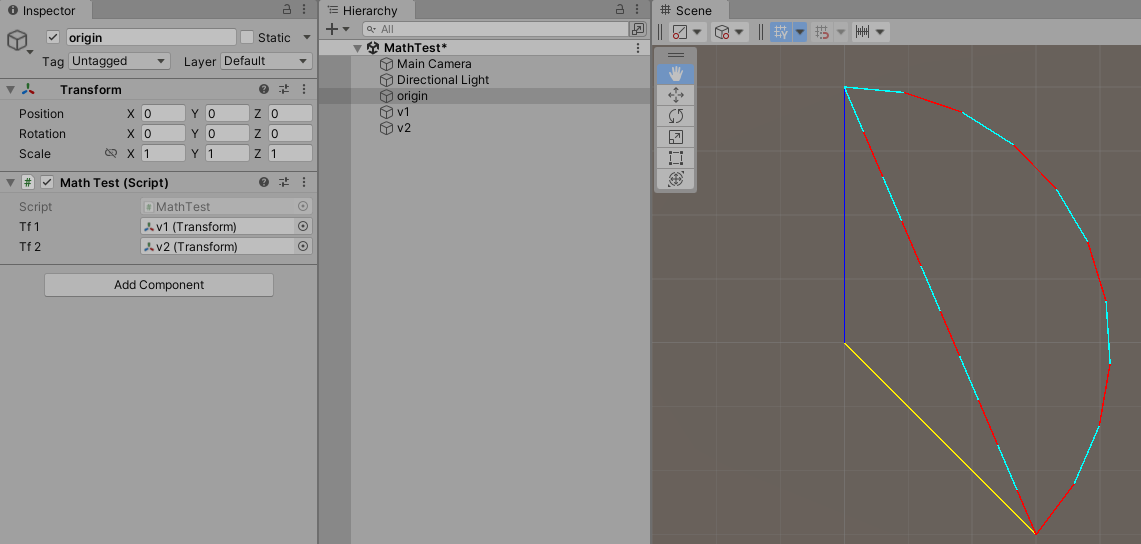
Vector3常用方法
向量普通乘
(x1, y1, z1)*(x2, y2, z2)=(x1*x2, y1*y2, z1*z2)
普通乘这个式子就是让分量相乘,没有为啥是这么算。shader中的Blend的颜色乘 DstColor*SrcColor + Zero*DstColor也是类似
Vector3.Dot(v1, v2)
a) 向量点乘 v1●v2
b1) 计算公式1:

b2) 计算公式2:

c) 用途:
c1) 计算v1在v2上的投影长度(v2为单位向量时);计算v2在v1上的投影长度(v1为单位向量时)。
比如:角色在相机观看方向上的距离 Vector3.Dot(playerPos, cameraForwardDir)
c2) 可以通过上面的公式, 计算向量夹角cos值
c3) 要求的值,与向量夹角的cos值成正比时,就可以考虑用单位向量的点乘来算。比如: 光照中,漫反射光线强度与表面法线和光源方向的夹角的cos值成正比(夹角越大,漫反射强度越弱)
Vector3.Angle(v1, v2)
a) 求两个向量的夹角, 范围为[0, 180]( 反余弦函数(arccos)的结果范围[0, 180])
b) 可以从点乘公式得出
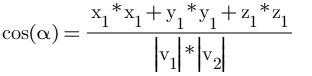
示例1:v1(0, 0, 4), v2(3, 0, -3), 两个向量的角度为135度
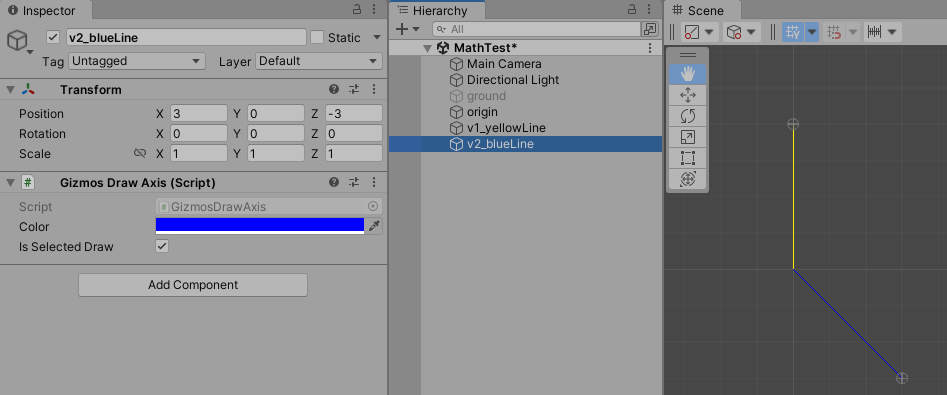
示例2:v1(0, 0, 4), v2(3, 0, -3), 两个向量的角度为135度
c) Vector3.Angle不会超过180度,也不会为负值
var v1 = new Vector3(1, 0, 0);
var v2 = new Vector3(-1, 1, 0);
Debug.Log($"{Vector3.Angle(v1, v2)}"); //135度
var v3 = new Vector3(-1, -1, 0);
Debug.Log($"{Vector3.Angle(v1, v3)}"); //135度
var v4 = new Vector3(1, -1, 0);
Debug.Log($"{Vector3.Angle(v1, v4)}"); //45度
Vector3.Cross(v1, v2)
a) 向量叉乘 v1×v2
b) 用途: 可以得到一个垂直于向量v1, v2的向量v3; 然后又可以对v1, v3做叉乘, 得到一个垂直于v1, v3的向量v4(v1, v3, v4相互垂直,就类似x轴,y轴,z轴那样了)
c) 公式: (y1*z2 - z1*y2, x2*z1 - x1*z2, x1*y2 - y1*x2)
d) z轴为0时(二维向量)的公式: (0, 0, x1*y2 - y1*x2)或 (0, 0, |v1|*|v2|*sin_a)。
注意:有的教程中,二维向量的教程直接写成了: v1×v2 = x1*y2 - y1*x2 = |v1|*|v2|*sin_a, 这样很容易造成误导,认为叉乘的结构是一个值(标量),这是不对的。
e) 如果是2维向量,可以用于判断向量是否平行或共线(此时叉乘结果为0)。
f) 如果是2维向量:
f-1) 叉乘结果>0,v1逆时针旋转到v2的角度在180度内,因为sin在(0, 180)区间结果>0
f-2) 叉乘结果<0,v1顺时针旋转到v2的角度在180度内,因为sin在(180, 360)区间结果<0
f-3) 叉乘结果=0,v1和v2的角度为0度或180度,sin(0)和sin(180)结果均为0,即:两向量平行或共线

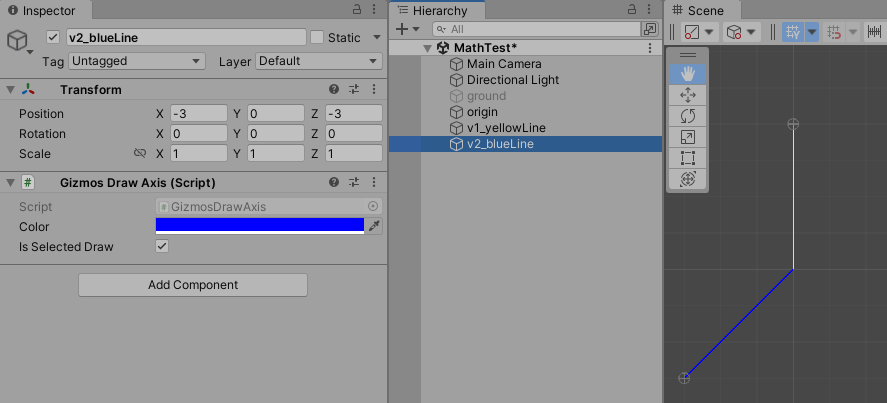
v1(0, 0, 4), v2(3, 0, -3), 叉乘得到的向量v3是红色那根线
using UnityEngine; public class MathTest : MonoBehaviour { public Transform tf1; public Transform tf2; void Update() { if (Input.GetKey(KeyCode.Alpha1)) { var v1 = tf1.position; var v2 = tf2.position; Debug.DrawLine(v1, Vector3.zero, Color.blue); Debug.DrawLine(v2, Vector3.zero, Color.yellow); var v3 = Vector3.Cross(v1, v2); Debug.DrawLine(v3, Vector3.zero, Color.red); } } }
Vector3.Magnitude
a) 向量长度, 即|v1|=根号(x1*x1 + y1*y1 + z1*z1)
Vectro3.SqrMagnitude
a) 向量长度的平方, 即|v1|=x1*x1 + y1*y1 + z1*z1
b) 用途, 减少一次开根号的运算, 对于运算量大的情况, 通过不开根号做相关运算可以在一定程度上优化性能
Vector3.Distance(v1, v2)
a) 两个向量的距离,公式: 根号(sqrt(x1-x2) + sqrt(y1-y2) + sqrt(z1-z2))

using UnityEngine; public class MathTest : MonoBehaviour { public Transform tf1; public Transform tf2; void Update() { if (Input.GetKey(KeyCode.Alpha1)) { var v1 = tf1.position; var v2 = tf2.position; Debug.DrawLine(v1, Vector3.zero, Color.blue); Debug.DrawLine(v2, Vector3.zero, Color.yellow); var dis = Vector3.Distance(v1, v2); Debug.DrawLine(v1, v2, Color.red); } } }
Vector3.Normalize
a) 求单位向量
Vector3.Lerp(v1, v2, t)
a) 线性插值。对于位置用这个插值函数
Vectro3.Slerp(v1, v2, t)
b) 球形插值。对于角度或转向这种操作, 用这个插值函数
using UnityEngine; public class MathTest : MonoBehaviour { public Transform tf1; public Transform tf2; void Update() { if (Input.GetKey(KeyCode.Alpha1)) { var v1 = tf1.position; var v2 = tf2.position; Debug.DrawLine(v1, Vector3.zero, Color.blue); Debug.DrawLine(v2, Vector3.zero, Color.yellow); var lastPos = v1; for (var i = 1; i <= 10; ++i) { var v3 = Vector3.Lerp(v1, v2, 0.1f * i); if (i % 2 == 0) Debug.DrawLine(v3, lastPos, Color.red); else Debug.DrawLine(v3, lastPos, Color.cyan); lastPos = v3; } lastPos = v1; for (var i = 1; i <= 10; ++i) { var v3 = Vector3.Slerp(v1, v2, 0.1f * i); if (i % 2 == 0) Debug.DrawLine(v3, lastPos, Color.red); else Debug.DrawLine(v3, lastPos, Color.cyan); lastPos = v3; } } } }
关于基向量i, j, k
一般就是对应x, y, z轴的3个基向量,i=(1, 0, 0), j=(0, 1, 0), k=(0, 0, 1)
所以看到这样的写法要认识:(a, b, c) = ai + bj + ck, 其中a, b, c为常数

 浙公网安备 33010602011771号
浙公网安备 33010602011771号