Reinforce-Rej
机构:Salesforce AI Research
链接:https://arxiv.org/abs/2504.11343
alpharxiv🌟:1200+
insight
在这项工作中,我们从一种类似于增强的算法视角重新审视GRPO 并分析其核心组件。令人惊
讶的是,我们发现一个简单的拒绝采样基准RAFT,它仅在正向奖励样本上进行训练,其性能与GRPO 和PPO 相比具有竞争力。我们的消融研究揭示了GRPO 的主要优势来源于丢弃完全错误响应的提示,而不是来自其奖励规范化。
method
RAFT
- RAFT(就是拒绝采样+SFT)
- 数据采集。对于一个批量的提示 \(\{x_{1}, \cdots, x_{M}\}\),我们从参考模型(例如,当前模型)中为每个提示抽取 \(n\) 个响应,以获得每个 \(x_{i}\) 的候选响应 \(\{a_{i,1}, \cdots, a_{i,n}\}\)。
- 数据排名(拒绝采样)。对于每个提示 \(x_{i}\),我们使用二元奖励函数 \(r(x, a)\) 计算每个响应 \(\{r_{i,1}, \cdots, r_{i,n}\}\) 的奖励值,并仅保留具有最高奖励的响应(通常为 \(r=1\))。由此得到的正例集合被聚合为一个数据集 \(D\)。
- 模型微调。然后针对所选数据集的最大化对数似然,对当前策略 \(\pi\) 进行微调:
Reinforce(直接使用奖励作为优势)
为了简单起见,我们以将动作作为一个整体(也就是说,将LLM生成的一段话看作一个动作,在这个场景下,奖励(一步的收益)=回报(多步的总收益),最大化期望回报=最大化期望奖励)来说明这个想法,并稍后扩展到自回归模型。策略梯度算法旨在解决以下学习目标:
其中x表示状态,也就是用户输入;\(d_0\)表示状态分布,也就是整个题库;\(\mathbb{E}_{x \sim d_0}\)表示模型在整个数据集上的均值。a表示动作,也就是模型生成的响应,\(\pi_\theta(\cdot|x)\)表示模型给定提示x,生成a的概率,\(\mathbb{E}_{a \sim \pi_\theta(\cdot|x)}\)表示给定提示x,模型生成的所有输出的概率平均。\(r(x, a)\)是奖励。 \(\theta\) 是神经网络的参数。
我们可以使用策略上升来更新策略网络:
其中 \(\nabla_\theta J(\theta)\) 在文献中被称为 策略梯度。策略梯度由下式给出:
在 实 践 中 , 类 似 于 RAFT 的 流 水 线 , 我 们 通 常 使 用 \(\pi _{\theta _{\mathrm{old}}}\)将轨迹收集到经验池\(\mathcal{D}\)中,并使用这些样本来计算随机性策略梯度以更新\(\pi_{\theta_\mathrm{old}}\)。然而,对于严格的同策略训练,我们必须在单步梯度上升后收集新的数据。
为了加速训练,我们通常以小批量方式执行多步操作,并采用重要性采样技术来校正分布。具体来说,我们可以重写目标函数为:
然后,使用由\(\pi_{\theta_{old}}\)收集的批量轨迹\(\{x,a,r\}\),我们可以使用上述重要性采样技巧更新多个步骤。然而, 如果\(\pi_\mathrm{\theta}\)和\(\pi_\mathrm{\theta_\mathrm{old}}\)的分布相差太远,重要性采样可能导致高方差,进而导致训练不稳定。
为了稳定训练,我们还可以利用 PPO 中的裁剪技术。最后,损失函数为:
由于 LLM 是自回归的,我们通常将每个词元视为一个动作。因此,我们可以将损失扩展到词元级的对应项:
其中\(s_t(\theta)=\frac{\pi_\theta(a_t|x,a_{1:t-1})}{\pi_{\theta_\mathrm{old}}(a_t|x,a_{1:t-1})}\)和\(a_t\)是\(t\)的第\(a\)个 Token。
GRPO(使用组间相对优势)
采用了一个与上面相似的损失函数,但用优势函数\(A_t(x,a)\)替换了\(r(x,a)\), 该优势函数是针对响应\(a\)的第\(t\)个词元计算的。具体来说,对于每个提示\(x\), GRPO 将采样\(n>1\)个响应,并为第 i 个响应的第\(t\)个词元计算以下优势:
mean\(( r_1, \cdots r_n)\)在 RL 文献中常被称为基准,用于降低随机梯度的方差。
迭代DPO
DPO 算法依赖于成对型比较数据集\(\{(x,a^+,a^-)\}\) ,其中\(a^+\succ a^-\)是对提示符\(x\)的两个响应。然后,DPO 优化以下对比损失:
其中\(\beta>0\)和\(\pi_\mathrm{ref}\)通常被设置为初始检查点。原始 DPO 算法在离线和异策略数据上进行训练。在后续研究中, 表明我们可以迭代地使用中间检查点生成新的响应,标记偏好信号,并在自生成的同策略数据上进行训练,以显著提高模型性能。
RAFT++(RAFT+重要性采样+剪裁)
我们注意到 RAFT 也可以被视为一种混合算法,在每次迭代中对经验池执行多步操作时可以是异策略。作为一个自然的扩展,我们将重要性采样和裁剪技术应用于原始 RAFT,得到了类似
其中指示符确保我们只对具有最高奖励(正例)的响应进行训练。
QA
- 为什么使用\(\min(w(x)\cdot r,clip()\cdot r)\)而不是直接使用\(clip()\cdot r\)?
基本思想:当且仅当“重要性比率”与“优势信号”同向越界时,才会触发裁剪限制。。这是在鼓励回调,限制冒进
- 同向越界:策略已经朝某个方向(增大概率或减小概率)变化很大,而优势信号确认这个方向是对的。
- 例子:好动作,比率 \(r > 1 + \epsilon\)(概率已经提得很高),\(A > 0\)(确实好)。
- 风险:继续优化会导致策略过于“贪婪”、失去随机性,并且新旧策略差异过大,下次估计失效。
- 对策:触发裁剪,梯度为零,停下来!让其他动作有机会被优化。
- 反向越界:策略变化方向与优势信号指示的方向相反。
- 例子:好动作,比率 \(r < 1 - \epsilon\)(概率被压得很低),\(A > 0\)(其实好)。
- 风险:策略正在“错杀忠良”。
- 对策:不触发裁剪,允许回调,赶紧纠正!
| 优势 A 的符号 | 比率 r 相对于区间 | 是否触发 Clip(限制更新) | 逻辑解释 |
|---|---|---|---|
| A > 0 (好动作) | r > 1 + ε (过高) | 是 | 防止过度优化一个好动作 |
| A > 0 (好动作) | r < 1 - ε (过低) | 否 | 允许回调,增加好动作的概率 |
| A < 0 (坏动作) | r > 1 + ε (过高) | 否 | 允许回调,减少坏动作的概率 |
| A < 0 (坏动作) | r < 1 - ε (过低) | 是 | 防止过度惩罚一个坏动作 |
exp
基本观察
-
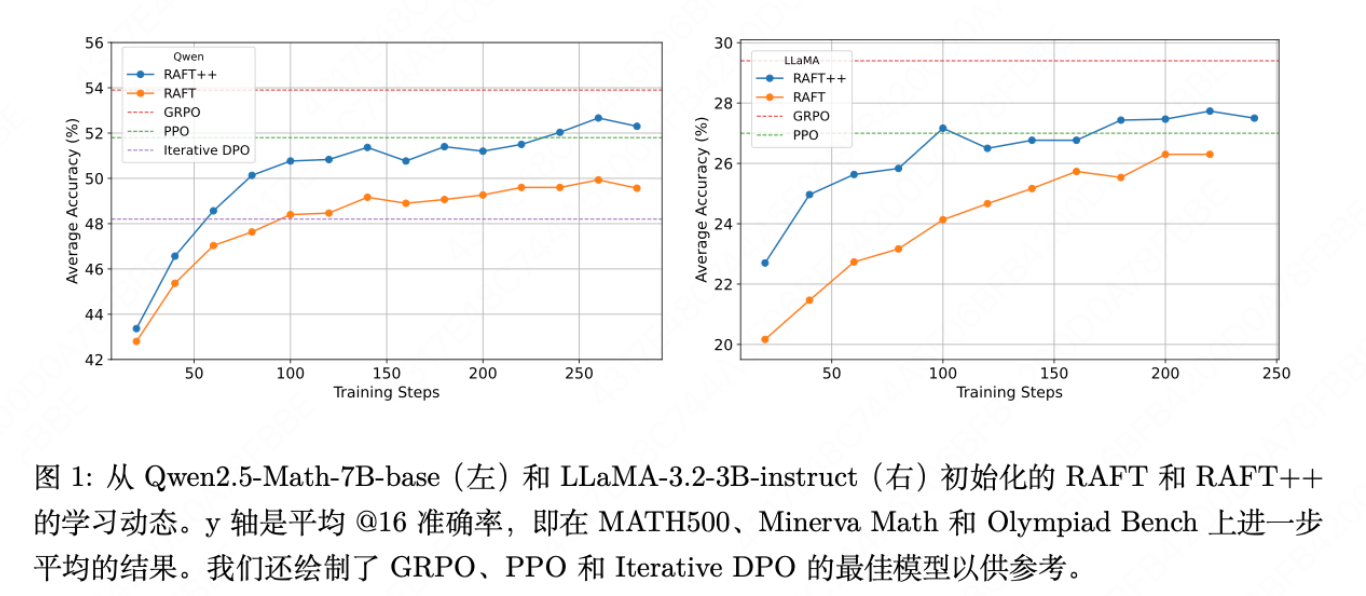
最简单的RAFT方法,其性能与复杂的PPO和迭代DPO相当,甚至更具竞争力。其改进版RAFT++的表现更是接近当前最先进的GRPO。
-
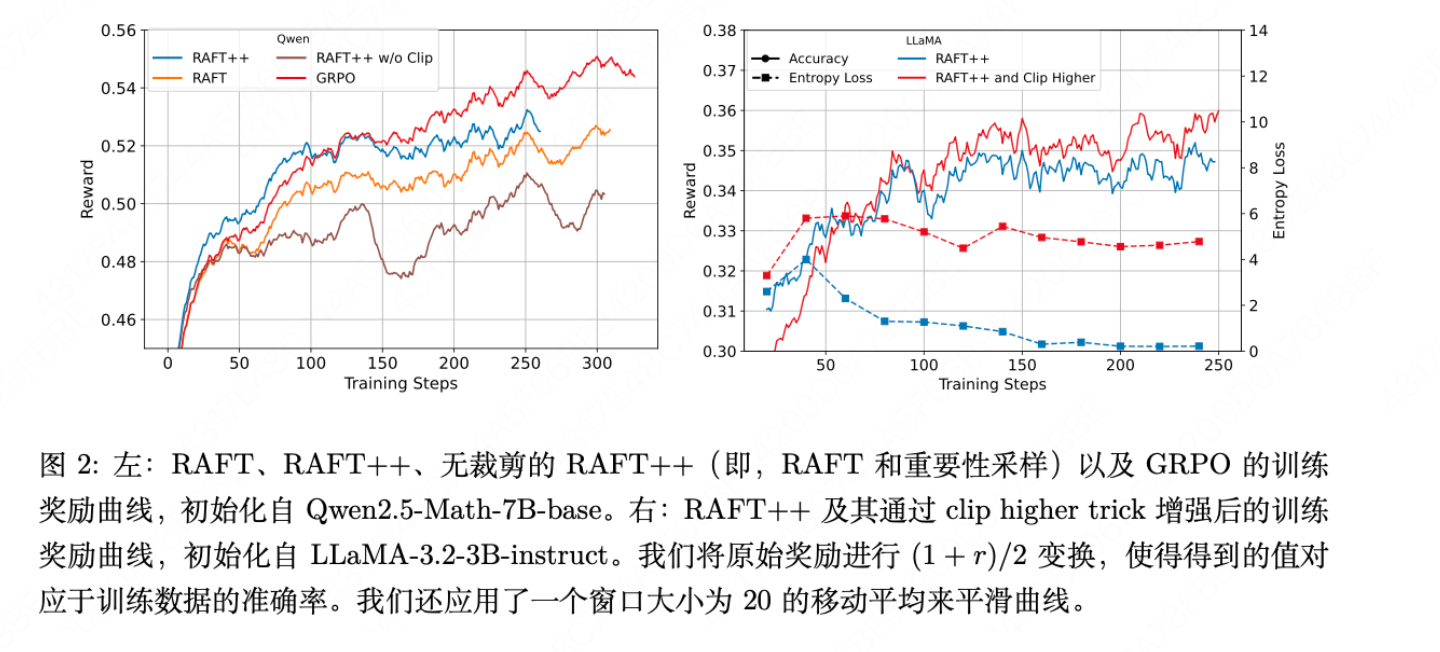
在RAFT基础上引入重要性采样和裁剪(即RAFT++)是有效的,它带来了更快的收敛速度和更高的最终性能,如表1所示。但作者也发现,裁剪是关键,如果只加重要性采样而不加裁剪,效果反而会变差(见图2),这纠正了此前认为裁剪不重要的观点。
两个问题
为什么RAFT++初期收敛快,但GRPO最终超越了GRPO
- 性能转折点:RAFT++在训练早期收敛极快,但在约100轮迭代后增速放缓,最终被GRPO超越(见图1、2)。这引出了一个核心问题:为什么会有这个转折点?GRPO超越RAFT++的真正原因是什么?
![[Pasted image 20251216131354.png]] - 作者比较了RAFT++和GRPO训练过程中的策略熵(衡量策略的随机性或探索性)和KL散度(衡量策略相对于初始模型的变化程度)。
- 发现:如图3所示,RAFT++的策略熵下降极快,意味着模型迅速变得“固执”,只倾向于生成它认为正确的答案,减少了探索新解法的可能性。这解释了其中后期性能增长乏力的问题。相比之下,GRPO通过利用包含负例(错误答案)的样本,更好地保持了策略的探索性。
GRPO真正有效的组件是什么
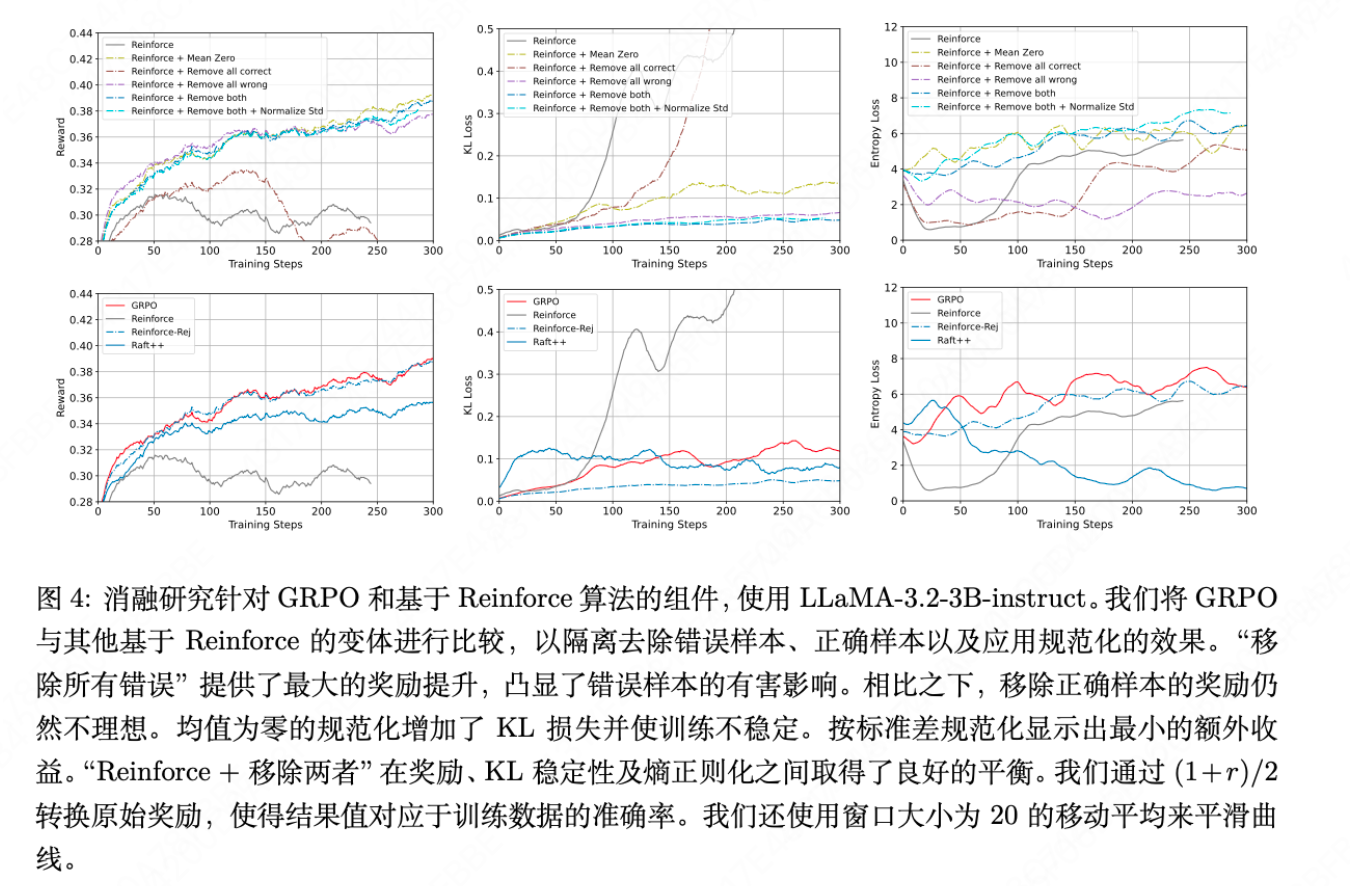
GRPO被认为有效的两个组件是:A. 奖励标准化(减去均值除以标准差)和 B. 使用了所有样本(包括正例和负例)。作者通过设计多个Reinforce算法的变体进行隔离测试:
- Reinforce(基准)
- Reinforce + 移除全部错误样本
- Reinforce + 移除全部正确样本
- Reinforce-Rej:移除全部错误和全部正确的样本(当方差为0时,优势为0)
# GRPO: 归一化
scores[i] = (scores[i] - id2mean[index[i]]) / (id2std[index[i]] + epsilon)
# REINFORCE-REJ: 不归一化
if id2std[index[i]] > 0:
scores[i] = scores[i] # 保持原值
else:
scores[i] = 0 # 如果组内无方差,advantage=0
-
Reinforce-Rej + 标准差标准化
-
核心发现:性能提升的最大贡献来自于“移除全部错误样本”。也就是说,GRPO的成功主要不是因为它巧妙地对所有样本进行了加权,而是因为它隐式地过滤掉了那些所有生成结果都错误的、极具干扰性的提示。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号