直接平衡法或刚度法\(^{2}\)
直接平衡法通过基本单元的力平衡条件以及力/变形关系,得出关联节点力和节点位移的刚度矩阵以及单元方程。由于直接平衡法最易应用于线单元或一维单元,可以分别将其应用于弹簧单元、杆单元和梁单元。
直接刚度法\(^{2}\)
节点力与节点位移的关系,此关系是刚度矩阵
\[\left\{ \begin{array}
\hat{f}_{1x} \\\hat{f}_{2x}
\end{array} \right\}
\bigg[ \begin{array} {c}
{k}_{21} \quad {k}_{22} \\
{k}_{21} \quad {k}_{22}
\end{array} \bigg]
\]
位移函数
\[\hat{u}={a}_{1}+{a}_{2}\hat{x}
\]
矩阵形式
\[\hat{u}=[1 \quad \hat{x}]
\left\{ \begin{array}{c}
{a}_{1} \\ {a}_{2}
\end{array} \right\}
\]
位移用节点位移表示
\[\hat{u}(0)=\hat{d}_{1x}={a}_{1}
\\
\hat{u}(L)=\hat{d}_{2x}={a}_{2}L+\hat{d}_{1x}
\]
\[{a}_{1}=\frac{
\hat{d}_{2x}-
\hat{d}_{1x}
}{L}
\]
\[\hat{u}=\big(\frac{
\hat{d}_{2x}-
\hat{d}_{1x}} {L}
\big)+
\hat{d}_{1x}
\]
写成矩阵形式
\[\hat{u}=
\big[1-
\frac{\hat{x}}{L} \quad
\frac{\hat{x}}{L}
\big]
\left\{
\begin{array}{c}
\hat{d}_{1x}\\
\hat{d}_{2x}
\end{array}
\right\}
\]
或者
\[\hat{u}=[{N}_{1} \quad {N}_{2}]
\left\{
\begin{array}{c}
\hat{d}_{1x}\\
\hat{d}_{2x}
\end{array}
\right\}
\]
其中
\[{N}_{1}=1-
\frac{\hat(x)}{L}
\\
{N}_{2}=
\frac{\hat(x)}{L}
\]
其中$ {N}_{1}$ 叫形函数
弹簧变形
\[\delta=\hat{d}_{2x}-{d}_{1x}
\]
应变应力关系用力位移关系代替
\[T=k\delta
\]
代入
\[T=k(\hat{d}_{2x}-{d}_{1x})
\]
力的平衡
\[\hat{f}_{1x}=-T \quad\quad \hat{f}_{2x}=T
\]
联合得出
\[T=-\hat{f}_{1x}=k(\hat{d}_{2x}-\hat{d}_{1x})
\\
T=\hat{f}_{2x}=k(\hat{d}_{2x}-\hat{d}_{1x})
{}{}
\]
重写方程
\[\hat{f}_{1x}=k(\hat{d}_{1x}-\hat{d}_{2x})
\\
\hat{f}_{2x}=k(\hat{d}_{2x}-\hat{d}_{1x})
\]
矩阵形式
\[\underline{\hat{k}}=
\bigg[ \begin{array}{c}
\quad k \quad -k
\\
-k \quad\quad k
\end{array} \bigg]
\]
线性弹簧的刚度矩阵
\[\underline{K}=[K]=\sum_{e=1}^{N}\underline{k}^{e}
\\
\underline{F}=[F]=\sum_{e=1}^{N}\underline{f}^{e}
\]
功或能量法\(^{2}\)
功或能量法更适宜建立二维和三维单元的刚度矩阵与方程。
常常用来推导单元方程的功或能量法包括虚功原理( 利用虚拟位移)、最小势能原理和 Castigliano 理论。虚功原理可用于任何材料性能,而最小势能原理和 Castigliano 理论只能应用于弹性材料。
此外,虚功原理还适用于势函数不存在的情况。然而,三个原理对于线弹性材料都能够得出相同的单元方程。
势能法\(^{2}\)
总势能
\[\pi_{p}=\frac{1}{2}k(\hat{d}_{2x}-
\hat{d}_{1x}) ^2
-\hat{f}_{1x}{}\hat{d}_{1x}
-\hat{f}_{2x}{}\hat{d}_{2x}
\]
式中$ \hat{d}{2x}-\hat{d} $ 是弹簧的变形
方程的第一项是弹簧的应变能,简化方程
\[\pi_{p}=\frac{1}{2}k(\hat{d}_{2x}^{2}-
2\hat{d}_{2x}\hat{d}_{1x}+
\hat{d}_{1x}^{2})
-\hat{f}_{1x}{}\hat{d}_{1x}
-\hat{f}_{2x}{}\hat{d}_{2x}
\]
\(\pi_{p}\)对每个节点位移取最小值,
\[\frac{\partial \pi_{p}}{\partial \hat{d}_{1x}}=
\frac{1}{2}k(-2\hat{d}_{2x}+2\hat{d}_{1x})-\hat{f}_{1x}
\\
\frac{\partial \pi_{p}}{\partial \hat{d}_{2x}}=
\frac{1}{2}k(2\hat{d}_{2x}-2\hat{d}_{1x})-\hat{f}_{2x}
\]
简化方程
\[k(-\hat{d}_{2x}+\hat{d}_{1x})=\hat{f}_{1x}
\\
k(\hat{d}_{2x}-\hat{d}_{1x})=\hat{f}_{2x}
\]
矩阵形式
\[\underline{\hat{k}}=
\bigg[ \begin{array}{c}
\quad k \quad -k
\\
-k \quad\quad k
\end{array} \bigg]
\]
加权残余法\(^{2}\)
加权残余法在推导单元方程时是很有用的,其中伽辽金法十分著名。加权残余法在任何适用于能量法的场合都能够得到与其相同的结果。当难以得到泛函(如势能)时,加权残余法就特别有用。加权残余决能够直接将有限元方法应用于任何微分方程之中。
伽辽金法\(^{2}\)
没有分布载荷
\[\frac{d}{d\hat{x}}(AE\frac{d\hat{u}}{d\hat{x}})
\]
伽辽金法:
\[\int_{0}^{L}\frac{d}{d\hat{x}}(AE\frac{d\hat{u}}{d\hat{x}}){N}_{i}d\hat{x}
\]
分布积分
\[({N}_{i}AE\frac{d\hat{u}}{d\hat{x}})\bigg|_{0}^{L}-\int_{0}^{L}AE\frac{d\hat{u}}{d\hat(x)}
\frac{d{N}_{i}}{d\hat{x}}d\hat{x}
\]
分布积分中引入了边界条件。
由于 \(\hat{u}=[N]{\hat{d}}\) , 因此
\[\frac{d\hat{u}}{d\hat{x}} = [ -\frac{1}{L} \quad \frac{1}{L}]
\left\{
\begin{array}
\hat{d}_{1x} \\ \hat{d}_{2x}
\end{array}
\right\}
\]
将上述公式代入分布积分后的公式
\[AE\int_{0}^{L}\frac{d{N}_{i}}{d\hat(x)}[-\frac{1}{L} \quad \frac{1}{L}]d\hat{x}
\left\{ \begin{array}
\hat{d}_{1x} \\ \hat{d}_{2x}
\end{array} \right\}
=\bigg({N}_{i}AE\frac{d\hat{u}}{d\hat{x}} \bigg)\bigg|_{0}^{L}
\]
上述方程是两个方程,一个\({N}_{i}={N}_{1}\) ,一个\({N}_{i}={N}_{2}\)
利用\({N}_{i}={N}_{1}\) 得出
\[AE\int_{0}^{L}\frac{d{N}_{1}}{d\hat(x)}[-\frac{1}{L} \quad \frac{1}{L}]d\hat{x}
\left\{ \begin{array}
\hat{d}_{1x} \\ \hat{d}_{2x}
\end{array} \right\}
=\bigg({N}_{1}AE\frac{d\hat{u}}{d\hat{x}} \bigg)\bigg|_{0}^{L}
\]
替换\(d{N}_{i}/d\hat(x)\), 得出
\[AE\int_{0}^{L} \bigg[-\frac{1}{L}\bigg]
\bigg[-\frac{1}{L} \quad \frac{1}{L} \bigg]
d\hat{x}
\left\{ \begin{array}
\hat{d}_{1x} \\ \hat{d}_{2x}
\end{array} \right\}
=\hat{f}_{1x}
\]
式中$ \hat{f}_{1x}=AE(d\hat{u}/d\hat{x})$, 因为 \(x=0\) 时,\({N}_{1}=1\), \(x=L\) 时,\({N}_{1}=0\)
\[\frac{AE}{L}\int_{0}^{L}
\big[\frac{1}{L} \big]
\big[ -\frac{1}{L} \quad \frac{1}{L} \big]
\left\{ \begin{array}{c}
\hat{d}_{1x} \\ \hat{d}_{2x}
\end{array} \right\}
=\bigg({N}_{2} AE \frac{d\hat{u}}{d\hat{x}} \bigg)\bigg|_{0}^{L}
\]
简化方程
\[\frac{AE}{L}(\hat{d}_{2x}-\hat{d}_{1x})=\hat{f}_{2x}
\]
加权余量法与能量法的关系\(^3\)
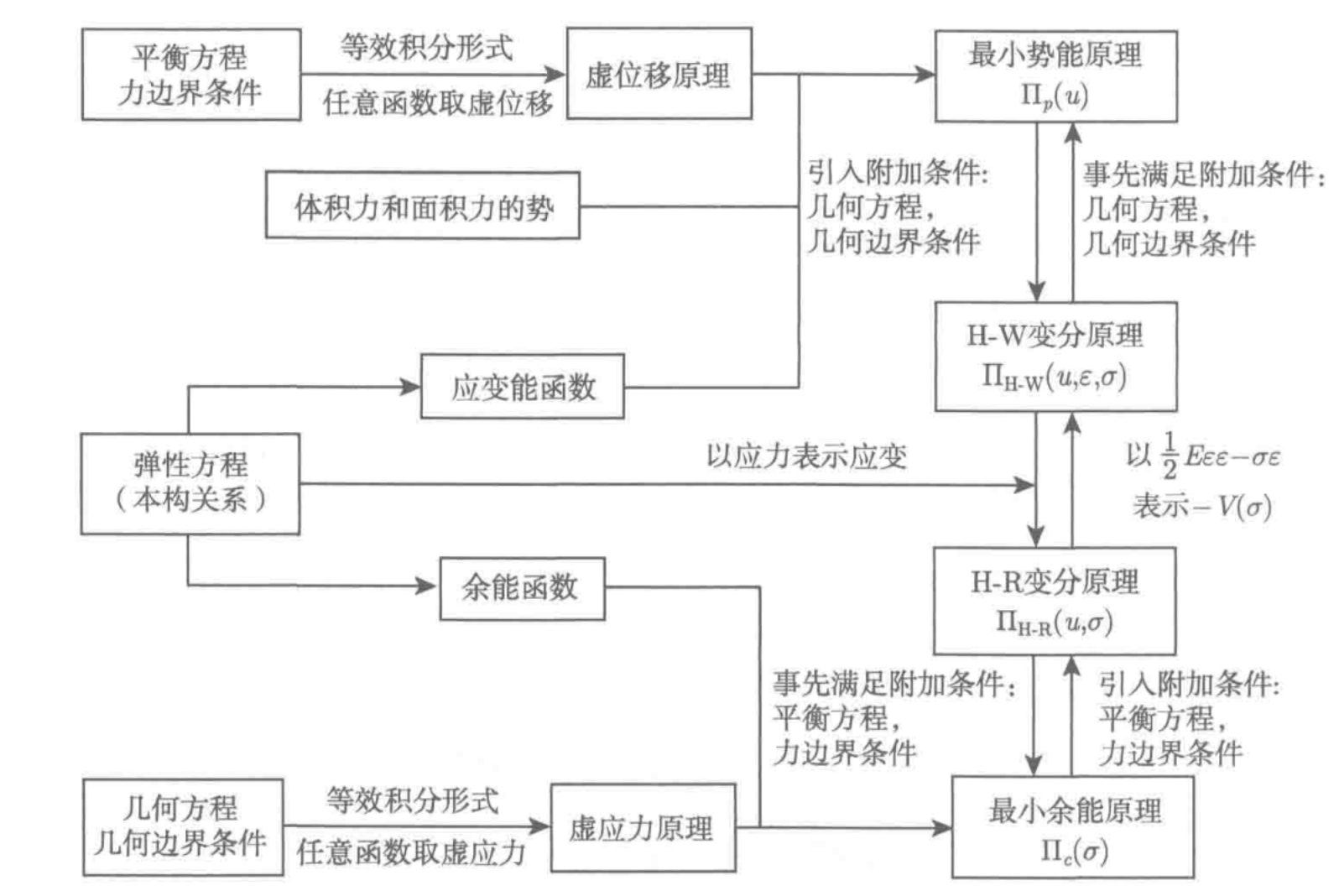
在导出虚位移原理与虚应力原理的过程中,未涉及弹性方程 (本构关系),所以虚位移原理不仅可以用于线弹性问题,而且可以用于非线弹性及弹塑性等材料非线性问题。将物理方程引入虚位移原理和虚应力原理可以分别导出最小势能原理和最小余能原理。它们本质上和等效积分的伽辽金“弱”形式相一致。这些都是建立弹性力学有限元方程的理论基础。
当从虚位移原理出发建立最小势能原理后,通过拉格朗日乘子引入附加条件, 可将变分原理一般化,建立包括 H-W 变分原理、H-R 变分原理和最小余能原理在内的一系列变分原理。反之,从虚应力原理出发建立最小余能原理后,也可以用类似的步骤得到包括 H-R 变分原理、H-W 变分原理和最小势能原理在内的一系列变分原理。还需指出,最小势能原理和最小余能原理是独立场函数 \((u_i\)或\(\sigma_{ij})\) 的具有附加条件的极值原理,而 H-W 变分原理和 H-R 变分原理则分别是 3 个独立场函数\((u_i,\varepsilon_{ij},\sigma_{ij})\)和 2 个独立场函数\((u_i,\sigma_{ij})\)或\((u_i,\varepsilon_{ij})\)的没有附加条件的驻值原理。
对于任意给定的微分方程可采用伽辽金加权余量法建立有限元格式;而对于力学的微分方程可直接采用虚位移 (应力) 原理或变分原理。对于弹性力学微分方程则直接采用变分原理更为高效。
线弹性理论的变分原理\(^3\)
![image-20240707132556848]()
变分原理
弱形式→变分\(^{1}\)
所有的问题,都存在弱形式,但是只有线性自伴随问题才存在变分原理。
自然变分/约束变分\(^{1}\)
势能泛函 \(\Pi (u(x))\)可以通过原微分方程和边界条件的伽辽金形式得到,这种形式叫自然变分原理。自然变分原理的场函数u事先需要本质边界条件,其解具有明确的上下界形式。在许多情况,场函数还要满足一些附加条件,相应的变分成为约束变分原理。---详见第五章
里茨法\(^{1}\)
里茨法是基于变分原理的一种近似解法,它将试探解取为一族已知函数(基函数或者形函数)的线性组合。然后利用泛函的驻值条件确定待定系数d1。
例1 有泛函\(^{4}\)
\[\Pi=\frac{1}{2}\int\limits_{0}^{1}\overline{u}(x)^{2} \mathrm{d}x-\frac{1}{2}\int\limits_{0}^{1}\left(\frac{\mathrm{d} \overline{u}(x)}{\mathrm{d}x}\right)^{2}\mathrm{d}x +\int\limits_{0}^{1}x\overline{u}(x) \mathrm{d}x
\]
它是下面微分方法的等效积分形式
\[\mathbb{B}(u(x))=\frac{\mathrm{d}^2u(x)}{\mathrm{d}x^2}+u(x)+x=0
\quad {on}
\quad \Omega=[0,1]
\]
边界条件
\[\begin{aligned}u(x&=0)=0\\u(x&=1)=0\end{aligned}
\]
该方程的解析解为
\[u(x)=\frac{\sin(x)}{\sin(1)}-x
\]
下面采用瑞利里茨法求解,假设满足边界条件的试函数为
\[\begin{aligned}&u_{1}=x(x-1)\alpha_{1}\quad\longrightarrow\text{一个参数}\\&u_{2}=x(x-1)(\alpha_{1}+\alpha_{2}x)\quad\text{两个参数}\end{aligned}
\]
将第一个试函数代入,可得
\[\begin{aligned}
\Pi _1
& =\frac{1}{2}\int\limits_{0}^{1}\left(\alpha_{1}^{2}(x^{2}-x)^{2}-\alpha_{1}^{2}(2x-1)^{2}+2\alpha_{1}x^{2}(x-1)\right)\mathrm{d}x \\
&=\frac{1}{2}\int_{0}^{1}\left(\alpha_{1}^{2}x^{4}+(\alpha_{1}-\alpha_{1}^{2})2x^{3}+(3\alpha_{1}^{2}+2\alpha_{1})x^{2}+4\alpha_{1}^{2}x-\alpha_{1}^{2}\right)\mathrm{d}x
\end{aligned}
\]
对上式进行积分
\[\Pi _1=- \frac {3}{20} \alpha_1 ^2- \frac {1}{12}\alpha_1
\]
对上式进行变分,可得
\[\delta\Pi_1=\frac{\partial\Pi_1}{\partial\alpha_1}\delta\alpha_1=0=-\frac6{20}\alpha_1-\frac1{12}
\]
从而可以解得
\[\alpha_1=\frac{-5}{18}
\]
试函数可以表示为
\[u_1(x)=\frac{-5}{18}x(x-1)
\]
将两个参数的第二试函数代入并积分
\[\Pi_2=-\frac{3}{20}\alpha_1^2-\frac{13}{210}\alpha_2-\frac{3}{20}\alpha_1\alpha_2-\frac{1}{12}\alpha_1-\frac{1}{20}\alpha_2
\]
并将 将\(\Pi_2\)对于\(\alpha_1\)和\(\alpha_2\)进行变分,可得
\[\delta\Pi_{2}=\frac{\partial\Pi_{2}}{\partial\alpha_{1}}\delta\alpha_{1}=-\frac{3}{10}\alpha_{1}-\frac{3}{20}\alpha_{2}-\frac{1}{12}=0\\\delta\Pi_{2}=\frac{\partial\Pi_{2}}{\partial\alpha_{2}}\delta\alpha_{2}=-\frac{3}{20}\alpha_{1}-\frac{13}{105}\alpha_{2}-\frac{1}{20}=0
\]
联合求解
\[\alpha_{1}=\frac{-71}{369}\\\alpha_{2}=\frac{-7}{41}
\]
因此试函数可表示为
\[u_2(x)=x(x-1)\Big(-\frac{71}{369}-\frac{7x}{41}\Big)
\]
![image-20240707030404666]()
线性自伴随问题\(^{1}\)
对于线性自伴随问题,可以构造其变分原理。
考虑微分方程
\[\begin{aligned}\boldsymbol{L}(\boldsymbol{u})+\boldsymbol{b}&=0,\quad\forall\boldsymbol{x}\in\Omega\\\boldsymbol{B}(\boldsymbol{u})&=0,\quad\forall\boldsymbol{x}\in\Gamma\end{aligned}
\]
式中的L为微分算子。若微分算子L具有性质
\[L(\alpha\boldsymbol{u}_1+\beta\boldsymbol{u}_2)=\alpha\boldsymbol{L}(\boldsymbol{u}_1)+\beta\boldsymbol{L}(\boldsymbol{u}_2)
\]
则叫L为线性微分算子。
取任意函数V,对内积$\int_\Omega\boldsymbol{L}(\boldsymbol{u})\boldsymbol{v}\mathrm{d}\Omega $进行分布积分,知道对u的导数完全消失,得
\[\int_\Omega\boldsymbol{L}(\boldsymbol{u})\boldsymbol{v}\mathrm{d}\Omega=\int_\Omega\boldsymbol{u}\boldsymbol{L}^*(\boldsymbol{v})\mathrm{d}\Omega+\mathrm{b.t.}(\boldsymbol{u},\boldsymbol{v})
\]
其中 \(\mathrm{b.t.}(\boldsymbol{u},\boldsymbol{v})\)是边界积分项,算子\(L^*\)称为\(L\)的伴随算子。若\(L^*=L\),则称算子L是自伴随的。
例如,算子 $L(\cdot)=\frac{\mathrm{d}{2}(\cdot)}{\mathrm{d}x{2}} $ 是自伴随算子,构造内积并进行分布积分,得到
\[\begin{aligned}
\int_{x_1}^{x_2}L(u)v\mathrm{d}x& \begin{aligned}=\int_{x_1}^{x_2}\frac{\mathrm d^2u}{\mathrm dx^2}v\mathrm dx=-\int_{x_1}^{x_2}\frac{\mathrm du}{\mathrm dx}\frac{\mathrm dv}{\mathrm dx}\mathrm dx+\left.\left(\frac{\mathrm du}{\mathrm dx}v\right)\right|_{x_1}^{x_2}\end{aligned} \\
&=\int_{x_1}^{x_2}u\frac{\mathrm{d}^2v}{\mathrm{d}x^2}\mathrm{d}x-\left.\left(u\frac{\mathrm{d}v}{\mathrm{d}x}\right)\right|_{x_1}^{x_2}+\left.\left(\frac{\mathrm{d}u}{\mathrm{d}x}v\right)\right|_{x_1}^{x_2} \\
&=\int_{x_1}^{x_2}uL^*(v)\mathrm{d}x+\mathrm{b.t.}(u,v)
\end{aligned}
\]
上式可以看出,\(L=L^*=\frac{\mathrm{d}^2}{\mathrm{d}x^2}\),因此 \(L(\cdot)\)是自伴随算子。
对于自伴随算子L有
\[\int_\Omega\boldsymbol{L}(\boldsymbol{u})\boldsymbol{v}\mathrm{d}\Omega=\int_\Omega\boldsymbol{u}\boldsymbol{L}(\boldsymbol{v})\mathrm{d}\Omega+\mathrm{b.t.}(\boldsymbol{u},\boldsymbol{v})
\]
对于上述微分方程,伽辽金格式为
\[\int_\Omega\delta\boldsymbol{u}^\mathrm{T}[\boldsymbol{L}(\boldsymbol{u})+\boldsymbol{b}]\mathrm{d}\Omega-\int_\Gamma\delta\boldsymbol{u}^\mathrm{T}\boldsymbol{B}(\boldsymbol{u})\mathrm{d}\Gamma=0
\]
对于线性自伴随问题,有
\[\begin{aligned}
\int_\Omega\delta\boldsymbol{u}^\mathrm{T}\boldsymbol{L}(\boldsymbol{u})\mathrm{d}\Omega & =\int_\Omega\frac12\left[\delta\boldsymbol{u}^\mathrm{T}\boldsymbol{L}(\boldsymbol{u})+\delta\boldsymbol{u}^\mathrm{T}\boldsymbol{L}(\boldsymbol{u})\right]\mathrm{d}\Omega \\
&=\int_\Omega\frac12\left[\delta\boldsymbol{u}^\mathrm{T}\boldsymbol{L}(\boldsymbol{u})+\boldsymbol{u}^\mathrm{T}\boldsymbol{L}(\delta\boldsymbol{u})\right]\mathrm{d}\Omega+\mathrm{b.t.}(\boldsymbol{u},\delta\boldsymbol{u}) \\
&=\int_\Omega\frac12\left[\delta\boldsymbol{u}^\mathrm{T}\boldsymbol{L}(\boldsymbol{u})+\boldsymbol{u}^\mathrm{T}\delta\boldsymbol{L}(\boldsymbol{u})\right]\mathrm{d}\Omega+\mathrm{b.t.}(\boldsymbol{u},\delta\boldsymbol{u}) \\
&=\int_\Omega\delta\left[\frac12\boldsymbol{u}^\mathrm{T}\boldsymbol{L}(\boldsymbol{u})\right]\mathrm{d}\Omega+\mathrm{b.t.}(\boldsymbol{u},\delta\boldsymbol{u})
\end{aligned}
\]
代入得到
\[\delta\Pi=0
\]
式中
\[\Pi=\int_\Omega\left[\frac12\boldsymbol{u}^\mathrm{T}\boldsymbol{L}(\boldsymbol{u})-\boldsymbol{u}^\mathrm{T}\boldsymbol{b}\right]\mathrm{d}\Omega+\mathrm{b.t.}(\boldsymbol{u},\boldsymbol{u})
\]
对于线性自伴随问题,存在变分原理。
附录:
格林公式
设 \(\mathbf{F}(x, y)=M(x, y) \mathbf{i}+N(x, y) \mathbf{j}\) 为一个平面流体的速度场, 并设 \(M,N\)在区域 R 的每一点处的一阶偏导连续. 设 (x, y) 为 R 内一点, 且设 A 为一个小矩形, 它的一个顶点在 (x, y) , 且整个小矩形均位于 R 内 (图 13.24). 矩形的边平行于坐标轴, 长度分别为$ \Delta x $和 $ \Delta y $. 液体从底边穿出离开矩形的速率近似为
\[F( x , y ) \cdot ( - \mathbf{j})\Delta x = - N( x , y )\Delta x .
\]
![image-20240706170738263]()
这是速度在点(x,y)的外法方向的分量乘以线段的长,比如速度以“每秒米”为单位,流出速度是以每秒乘以米,或者每秒平方米,流体沿外法线方向穿出其他三边的速度可以类似估算:
逸出速度
\[\begin{aligned}&\text{顶边}:\quad\mathbf{F}( x , y + \Delta y ) \cdot \mathbf{j}\Delta x = N( x , y + \Delta y )\Delta x\\&\text{底边}:\quad\mathbf{F}( x , y ) \cdot ( - \mathbf{j} )\Delta x = - N( x , y )\Delta x\\&\text{右边}:\quad\mathbf{F}( x + \Delta x , y ) \cdot \mathbf{i}\Delta y = M( x + \Delta x , y )\Delta y\\&\text{左边}:\quad\mathbf{F}( x , y ) \cdot ( - \mathbf{i})\Delta y = - M( x , y )\Delta y .\end{aligned}
\]
将对边加一起
\[\text{上、下边:}\quad( N( x ,y + \Delta y ) - N( x ,y ) )\Delta x \approx \left(\frac{\partial N}{\partial y}\Delta y\right)\Delta x \\
\text{右、左边:}\quad(M( x + \Delta x ,y ) - M( x ,y ) )\Delta y \approx \left(\frac{\partial M}{\partial x}\Delta x\right)\Delta y .
\]
上面两式相加
\[\text{穿过矩形边界的通量} \approx \left(\frac{\partial M}{\partial x} + \frac{\partial N}{\partial y}\right)\Delta x\Delta y .
\]
两边再除以 \(\Delta x \Delta y\) 以算出单位面积的总通量或者穿过矩形的通量密度
\[\frac{\text{穿过矩形边界的通量}}{\text{矩形面积}} \approx \left(\frac{\partial M}{\partial x} + \frac{\partial N}{\partial y}\right).
\]
通量密度或散度
向量场 \(F=M\mathbf{i}+N\mathbf{j}\)\在点\((x,y)\)处的通量密度或散度为:
\[\mathrm{divF} = \frac{\partial M}{\partial x} + \frac{\partial N}{\partial y} .
\]
![image-20240706221931981]()
环量密度:旋度的K-分量
F绕A的边界的逆时针环量是沿着边界的流速之和,对底边,流速近似为:
\[F( x , y ) \cdot i \Delta x = M( x , y )\Delta x
\]
这是F在切向量i方向上的数值分量乘以该线段的长,而沿着其他边的逆时针的流速可以类似表示
\[\begin{aligned}
\text{上边:} \quad & \mathbf{F}( x , y + \Delta y ) \cdot ( - \mathbf{i})\Delta x = - M( x , y + \Delta y )\Delta x \\
\text{下边:} \quad & \mathbf{F}( x , y ) \cdot\mathbf{i} \Delta x = M( x , y )\Delta x \\
\text{右侧边:} \quad & \mathbf{F}( x + \Delta x ,y ) \cdot \mathbf{j} \Delta y = N( x + \Delta x ,y )\Delta y \\
\text{左侧边:} \quad & \mathbf{F}(x,y)\cdot(-\mathbf{i})\Delta\gamma = - N(x,y)\Delta\gamma .
\end{aligned}
\]
把对边的结果相加:
\[\text{上与下}:- ( M( x , y + \Delta y ) - M( x , y ) )\Delta x \approx- \left(\frac{\partial M}{\partial y}\Delta y\right)\Delta x\\\text{右与左}:\quad( N( x + \Delta x , y ) - N( x , y ) )\Delta y \approx \left(\frac{\partial N}{\partial x}\Delta x\right)\Delta y .
\]
两式相加,除以 \(\Delta x \Delta y\)
\[\frac{\text{绕矩形的环量}}{\text{矩形面积}} \approx \left(\frac{\partial N}{\partial x} - \frac{\partial M}{\partial y}\right).
\]
环量密度或旋度的k-分量
向量场$ F= Mi+Nj$在 \((x,y)\)的环量密度或者旋转的k-分量是数量值
\[(\mathrm{curl~}\mathbf{F})\cdot\mathbf{k} = \frac{\partial N}{\partial x} - \frac{\partial M}{\partial y}.
\]
![image-20240706222127934]()
格林定理的两种形式
格林定理的一种形式:在合适的条件下,穿过平面内一简单的闭曲线的向量场向外的通量等于该等于该曲线所围区域谁给你的散度的二重积分。
Green定理(通量-散度形式或法向形式)
场\(F=Mi+Nj\)穿过一简单闭合曲线C向外的通量等于 div F在C 所围区域R上的二重积分
\[\oint\limits_{c}\mathbf{F}\cdot\mathbf{n}\:\mathrm{d}s\:=\:\oint\limits_{c}M\mathrm{d}y\:-\:N\mathrm{d}x\:=\:\iint\limits_{R}\left(\frac{\partial M}{\partial x}\:+\:\frac{\partial N}{\partial y}\right)\mathrm{d}x\mathrm{d}y \\
向外通量 \qquad \qquad \qquad\qquad 散度积分
\]
格林定理的一种形式:向量场绕一简单的闭曲线逆时针的环流量等于场在该曲线缩在区域的旋度k分量的二重积分。
Green定理(环量-旋度形式或切向形式)
场\(F=Mi+Nj\)绕平面简单闭曲线C的逆时针方向的环量等于(curl F)k 在在C 所围区域R上的二重积分
\[\oint_{c}\mathbf{F}\cdot\mathbf{T}\mathrm{d}s\:=\:\oint_{c}M\mathrm{d}x\:+\:N\mathrm{d}y\:=\:\iint_{R}\left(\frac{\partial M}{\partial x}\:-\:\frac{\partial N}{\partial y}\right)\mathrm{d}x\:\mathrm{d}y\\
逆时针方向的环量 \qquad\qquad\qquad\qquad 旋度积分
\]
格林定理的两种形式是等价的
用格林公式证明线积分
如何把一些不同的曲线首尾相连地构成一条闭曲线C,那么在C上计算的积分过程会冗长、繁琐,因为有那么不同的积分要一个个计算。若C界出一个区域R,又在该区域可应用格林定理,那么,就能用格林定理把环绕C的线积分转成成R上的二重积分。
例1 (用格林公式证明线积分)计算线积分\(\oint_{c}xy\operatorname{d}y - y^{2}\operatorname{d}x\),其中C为正方形,是由直线x=1,y=1从第一象限截出的部分
这里用格林公式的两种形式各做一次,将正方向的线积分变成以正方形为边界的区域的二重积分。
- 用法向形式的公式
\[\begin{aligned}
\oint_{c}xy\operatorname{d}y - y^{2}\operatorname{d}x& =\iint_{k}\left( y + 2 y \right)\mathrm{d}x\mathrm{d}y = \int_{0}^{1}\int_{0}^{1}3 y \mathrm{d}x \mathrm{d}y \\
&=\int_{0}^{1}\bigl[ 3 xy \bigr]_{ x = 0}^{ \lambda = 1}\mathrm{d} y = \int_{0}^{1}3 y \mathrm{d} y = \left.\frac{3}{2} y^{2} \right|_{0}^{1} = \frac{3}{2} ,
\end{aligned}
\]
2.用切向形式的公式
\[\oint_{c} - y^{2}\mathrm{d}x + xy \mathrm{d}y = \iint_{R} ( y - ( - 2y ) ) \mathrm{d}x \mathrm{d}y = \frac{3}{2} .
\]
对特殊区域格林定理的证明
设C为xy平面内的一条光滑简单闭曲线,具有性质:平行坐标轴的直线与C至多交于两点,设R为C所围的区域,并设M,N及他们的一阶偏导数在某个包含C和R的开区域的每一个点上都连续,以下证明格林定理的环量-旋度形式
\[\:\oint_{c}M\mathrm{d}x\:+\:N\mathrm{d}y\:=\:\iint_{R}\left(\frac{\partial M}{\partial x}\:-\:\frac{\partial N}{\partial y}\right)\mathrm{d}x\:\mathrm{d}y\\
\]
![image-20240706225430113]()
如图所示,C由两段标明方向的部分组成:
\[\begin{array}{rcl}C_1 : y&= f_1( x ) , a \leqslant x \leqslant b ,\\C_2 : y&= f_2( x ) , b \geqslant x \geqslant a .\end{array}
\]
对任何a,b间的x,我们能关于y从$ y= f_1( x ) $ 到$ y= f_2( x ) \(的积分\) \frac {\partial M }{\partial y}$,得到
\[\begin{aligned}\int_{f_{1}(x)}^{f_{2}(x)}\frac{\partial M}{\partial y}\mathrm{d}y&=M( x ,y ) \bigg|_{y=f_{1}( x )} ^ {y=f_{2}( x )} \\&=M( x ,f_{2}( x ) ) - M( x ,f_{1}( x ) ) .\end{aligned}
\]
在对结果关于x从a积到b:
\[\begin{aligned}
\int_{a}^{b}\int_{f_{1}(x)}^{f_{2}(x)}\frac{\partial M}{\partial y}\mathrm{d}y\mathrm{d}x& =\int_{a}^{b}\left[ M( x ,f_{2}( x ) ) - M( x ,f_{1}( x ) ) \right]\mathrm{d}x \\
&=-\int_{b}^{a} M( x ,f_{2}( x ) ) \mathrm{d}x -\int_{a}^{b} M( x ,f_{1}( x ) ) \mathrm{d}x \\
&=-\int_{C_{2}}M\mathrm{d}x -\int_{C_{1}}M\mathrm{d}x =- \oint_{C}M\mathrm{d}x .
\end{aligned}
\]
因此
\[\oint_{c}M\mathrm{d}x = \iint_{R}\left(-\frac{\partial M}{\partial y}\right)\mathrm{d}x\mathrm{d}y .
\]
同理:
\[\oint\limits_{c}N\mathrm{d}y = \iint\limits_{R} \frac{\partial N}{\partial x}\mathrm{d}x\mathrm{d}y .
\]
曲面面积和曲面积分
小切平面 \(\Delta P_k\)分割近似所有小曲面 \(\Delta\sigma_{k}\),把他们合在一起构成曲面,因此
\[\sum\Delta P_k = \sum \frac{\Delta A_k}{|\cos \gamma_k|}
\]
上式是以下二重积分的近似
\[\iint_R\frac1{\mid\cos\gamma\mid}\mathrm{d}A .
\]
曲面面积公式
定义在一个有界闭平面区域R上的曲面
\[\text{曲面面积 }=\iint_R\frac{|\nabla f|}{|\nabla f\cdot\mathbf{p}|}\mathrm{d}A ,
\]
其中p是R的单位法向量,且$ \Delta f \cdot≠ p $
于是面积就是向量$ \Delta f$ 的模(长度)除以$ \Delta f$在R的法向的数值分量的绝对值的二重积分。
参考文献:
1.有限元法基础-张雄
2.有限元方法基础教程 (第五版)-Daryl
3.一维有限元法-左文杰
4.MATLAB和Abaqus有限元分析理论与应用
5、托马斯微积分(10/13版)
7.6/二维或三维的分布积分方法(格林公式)7.6.assets/image-20240707030404666.png)
7.6/二维或三维的分布积分方法(格林公式)7.6.assets/image-20240706170738263.png)
7.6/二维或三维的分布积分方法(格林公式)7.6.assets/image-20240706221931981.png)
7.6/二维或三维的分布积分方法(格林公式)7.6.assets/image-20240706222127934.png)
7.6/二维或三维的分布积分方法(格林公式)7.6.assets/image-20240706225430113.png)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号