悬挂建模流程
一、麦弗逊前悬挂组成
控制臂,轮柱,转向节立柱,减震器,弹簧,横拉杆,转向三角臂,轴套
安装件:
二、硬点与参数
1、硬点坐标
|
硬点名称 |
硬点坐标 |
定位 |
|
arm_out |
0,-700,0 |
控制臂/转向节 |
|
arm_front |
-150,-350,0 |
控制臂 |
|
arm_rear |
150,-350,0 |
控制臂 |
|
wheel_center |
0,-800,100 |
转毂/转向节三角臂 |
|
strut_lower |
0,-650,250 |
转向节/减震器 |
|
tierod_outer |
150,-650,250 |
转向节三角臂/转向节立柱/横拉杆 |
|
strut_upper |
0,-600,600 |
滑柱/减震器/弹簧 |
|
spring_lower |
0,-600,300 |
弹簧 |
|
tierod_inner |
200,-350,250 |
横拉杆 |
2、悬挂参数
toe_angle:0.1/0.1
camber_angle:-1/-1
3、减震器属性文件
4、弹簧属性文件
三、部件与连接信息
|
部件 |
名称 |
位置 |
方向 |
备注 |
||
|
定位方式 |
坐标 |
定位方式 |
坐标 |
|||
|
一般部件 |
control_arm |
user-entered location |
(0,-700,0) |
euler angles |
(0,0,0) |
控制臂 |
|
strut |
(0,-600,0) |
(0,0,0) |
滑柱 |
|||
|
hub_bearing |
(0,-600,0) |
(0,0,0) |
轮毂 |
|||
|
结构框 |
名称 |
定位 |
偏移量 |
定位方式 |
变量类型 |
参考变量 |
|
hub_bearing |
wheel_center |
(0,0,0) |
(orientation dependency):toe/camber |
parameter variable |
toe_angle/camber_angle |
|
|
安装件 |
名称 |
定位 |
次特征 |
|
|
|
|
subframe_to_body |
arm_front |
inherit |
/ |
/ |
/ |
|
|
strut_to_body |
strut_upper |
|
|
|
||
|
tierod_to_steering |
tierod_inner |
|
|
|
||
|
几何体 |
名称 |
一般部件 |
类型 |
定位 |
厚度/半径 |
备注 |
|
control_arm |
control_arm |
Arm |
arm_out/arm_front/arm_rear |
10 |
|
|
|
|
wheel_carrier |
wheel_center/strut_lower/tierod_outer |
10 |
转向节/一般部件-Wizard |
||
|
carrier_link |
wheel_carrier |
link |
strut_lower/tierod_outer |
10 |
|
|
|
|
tierod |
tierod_outer/tierod_inner |
10 |
横拉杆/一般部件-Wizard |
||
|
hub |
hub_bearing |
Cylinder |
(construction frame):hub_bearing |
30 |
几何尺寸:30/0 |
|
|
减震器 |
名称 |
|
连接部件 |
安装点(硬点) |
属性文件 |
备注 |
|
damper |
/ |
wheel_carrier/strut |
strut_lower/strut_upper |
|
|
|
|
螺旋弹簧 |
名称 |
|
连接部件 |
安装点(硬点) |
属性文件 |
安装长度 |
|
mainspring |
/ |
wheel_carrier/strut |
spring_lower/strut_upper |
|
304.1381265 |
|
|
连接 |
名称 |
连接类型 |
连接部件 |
定位(硬点) |
Active |
方向(Orient axils along line) |
|
strut_joint |
translational |
wheel_carrier/strut |
strut_upper |
always |
strut_lower/strut_upper |
|
|
arm_front |
衬套 |
control_arm/subframe_to_body |
arm_front |
/ |
(axis:Z):arm_front/arm_rear |
|
|
arm_rear |
衬套 |
arm_rear |
/ |
(axis:Z):arm_front/arm_rear |
||
|
arm_front |
revolute |
arm_front |
kinematic |
(axis:Z):arm_front/arm_rear |
||
|
arm_out |
spherical |
wheel_carrier/arm_out |
arm_out |
always |
偏移:(0,0,0) |
|
|
strut_upper |
衬套 |
strut/strut_to_body |
strut_upper |
/ |
user-entered location(euler angles)/(0,0,0) |
|
|
strut_upper |
spherical |
strut_upper |
kinematic |
偏移:(0,0,0) |
||
|
tierod_outer |
spherical |
wheel_carrier/tierod |
strut_upper |
always |
偏移:(0,0,0) |
|
|
tierod_inner |
hooke |
tierod/tierod_to_steering |
tierod_inner |
always |
偏移:(0,0,0)/方向:tierod_outer/tierod_inner |
|
三、控制臂
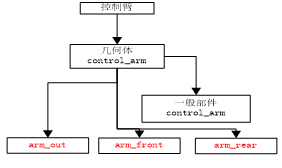
1、控制臂/一般部件:
名称:control_arm
位置:user-entered location /(0,-700,0)
方向:user-entered location(euler angles)/(0,0,0)
一般部件是一个具有质量,方向,空间位置的局部物体参考框。
2、控制臂/几何体
名称:control_arm
类型: Arm
一般部件:control_arm
定位(硬点):arm_out/arm_front/arm_rear
厚度(Thinkness):10
四、转向节
1、转向节/一般部件:
名称:wheel_carrier
定位(硬点):wheel_center/strut_lower/tierod_outer
厚度(Thinkness):10
Wizard方式,和一般部件的建模有什么不同?
2、转向节立柱/几何体
名称:carrier_link
类型: link
一般部件:wheel_carrier
定位(硬点):strut_lower/tierod_outer
半径(radius):10
三、减震器
1、滑柱/一般部件
名称:strut
位置:user-entered location /(0,-600,0)
方向:user-entered location(euler angles)/(0,0,0)
2、减震器
连接部件:wheel_carrier/strut
安装点(硬点):strut_lower/strut_upper
属性文件
四、螺旋弹簧
1、连接部件:wheel_carrier/strut
2、安装点(硬点):spring_lower/strut_upper
3、安装长度:304.1381265149
4、属性文件
弹簧的连接部件和减震器相同,安装点有个不同。
五、横拉杆/一般部件(Wizard方式)
名称:tierod
类型:link
定位(硬点):tierod_outer/tierod_inner
半径(radius):10
六、轮毂
1、轮毂/结构框
名称:hub_bearing
定位:wheel_center
偏移量:(0,0,0)
定位方式(orientation dependency):toe/camber
变量类型:parameter variable
参考变量:toe_angle/camber_angle
2、轮毂/一般部件
名称:hub_bearing
位置:user-entered location /(0,-600,0)
方向:user-entered location(euler angles)/(0,0,0)
3、轮毂/圆柱几何体
名称:hub
类型:Cylinder
一般部件:hub_bearing
结构框(construction frame):hub_bearing
半径(radius):30
几何尺寸:30/0
七、转向节/滑柱 连接
名称:strut_joint
连接部件:wheel_carrier/strut
运动副类型:translational
Active:always
定位(硬点)strut_upper
方向(Orient axils along line):strut_lower/strut_upper
连接部件和弹簧及减震器一样
八、控制臂连接
1、副车架安装件
名称:subframe_to_body
参考点(硬点):arm_front
次特征:inherit
2、前衬套
名称:arm_front
连接部件:control_arm/subframe_to_body
定位:arm_front
方向(axis:Z):arm_front/arm_rear
3、后衬套
名称:arm_rear
连接部件:control_arm/subframe_to_body
定位:arm_rear
方向(axis:Z):arm_front/arm_rear
除了定位硬点不一样,其他和前衬套一致。
4、控制臂与安装件/转动副
名称:arm_front
连接部件:control_arm/subframe_to_body
运动副类型:revolute
定位:arm_front
方向(axis:Z):arm_front/arm_rear
连接部件,定位,方向和前衬套一致。
5、控制臂与转向节 /球形副
名称:arm_out
连接部件:wheel_carrier/arm_out
运动副类型:spherical
定位:arm_out
偏移:(0,0,0)
八、滑柱连接
1、衬套
名称:strut_upper
连接部件:strut/strut_to_body
定位:strut_upper
方向:user-entered location(euler angles)/(0,0,0)
2、球形副
名称:strut_upper
连接部件:strut/strut_to_body
运动副类型:spherical
定位:strut_upper
偏移:(0,0,0)
九、转向节连接
1、铰链
名称:tierod_outer
连接部件:wheel_carrier/tierod
运动副类型:spherical
Active:always
定位:tierod_outer
偏移:(0,0,0)
2、虎克铰
名称:tierod_inner
连接部件:tierod/tierod_to_steering
运动副类型:hooke
Active:always
定位:tierod_inner
偏移:(0,0,0)
方向:tierod_outer/tierod_inner
十、转向轴线
Build-subpension parmetes -characteristics array-set
Steer axis calculation:geometic
Suspension type:independent
连接:strut/wheel_carrier
定位:strut_upper/arm_out
十一、通讯器
1、自动建立
1)input
tierod_to_steering
strut_to_body
subframe_to_body
2)Output
wheel_center
suspension_parameters_ARRAY
camber_angle
toe_angle
3、手动建立:
1)查看/修改悬挂试验台通讯器
Build-communicator-info
清除模型文本框,右键选择标准悬挂试验台
2)通讯讯器/悬挂安装件
名称:suspension_mount
输入/输出:output
类别(entity):mount
特征:inherit
部件名称:hub
3)通讯器/悬挂安装件
名称:suspension_upright
输入/输出:output
类别(entity):mount
特征:inherit
部件名称:wheel_carrier

 浙公网安备 33010602011771号
浙公网安备 33010602011771号