动力学方程的弱形式
静力学方程的弱形式
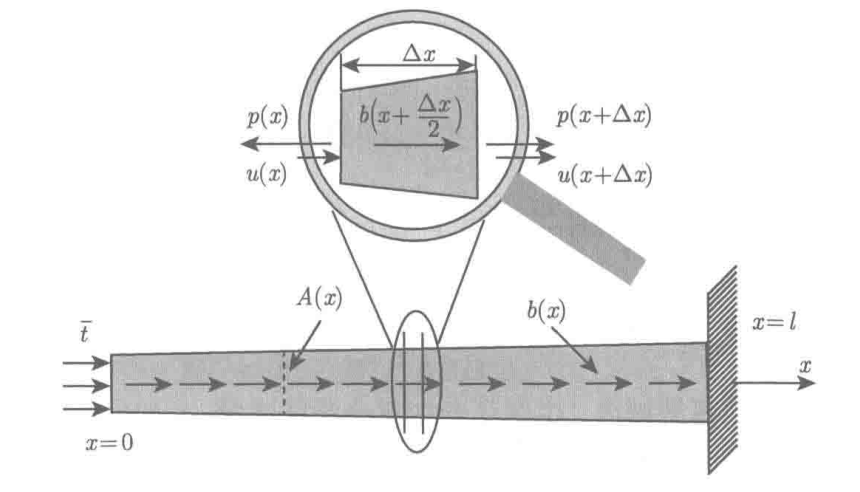
考虑图所示变截面弹性杆的静态响应。这是线性应力分析或线弹性问题的一个例子,我们需要求杆内的应力分布σ(x)。
应力由物体的变形产生,而变形由物体内各点的位移u(x)表征。位移导致用ε(x)表示的应变;应变是一个无量纲变量。杆受到分布力b(x)或集中力作用。这个力可能由重力(如果杆垂直放置而非水平放置)、磁力或热应力引起;在一维情况下,我们将考虑单位长度上的体力,所以b(x)的单位是力/长度。此外,载荷可以规定在杆端,在这些位置位移未被规定;这些载荷被称为牵引力,用t表示。这些载荷的单位是力/面积,当乘以面积时,就得到所施加的力。
静力学方程
\[\frac{\mathrm{d}}{\mathrm{d}x}\left(AE\frac{\mathrm{d}u}{\mathrm{d}x}\right)+b(x)=0,\quad0<x<l
\]
\[\sigma\left(0\right)=\left(E\frac{\mathrm{d}u}{\mathrm{d}x}\right)=-\bar{t}\\
\]
\[u\left(l\right)=\bar{u}
\]
积分弱形式
\[\int_0^lw\left[\frac{\mathrm{d}}{\mathrm{d}x}\left(AE\frac{\mathrm{d}u}{\mathrm{d}x}\right)+b\right]\mathrm{d}x=0,
\quad\forall w\quad \mathrm{(a)}
\]
\[\left[wA\left(E\frac{\mathrm{d}u}{\mathrm{d}x}+\bar{t}\right)\right]_{x=0}=0,\quad\forall w\mathrm{(b)}
\]
(4)整理成
\[\int_0^lw\frac{\mathrm{d}}{\mathrm{d}x}\left(AE\frac{\mathrm{d}u}{\mathrm{d}x}\right)\mathrm{d}x+\int_0^lwb\mathrm{d}x=0,\quad\forall w
\]
分布积分
\[\int_{0}^{l} w \frac{d}{dx} \left( AE \frac{du}{dx} \right) dx = \left[ w \left( AE \frac{du}{dx} \right) \right]_{0}^{l} - \int_{0}^{l} \left( AE \frac{du}{dx} \right) \frac{dw}{dx} dx
\]
(7 )代入(6)
\[\left.\left(wAE\frac{\mathrm{d}u}{\mathrm{d}x}\right)\right|_0^l-\int_0^l\frac{\mathrm{d}w}{\mathrm{d}x}AE\frac{\mathrm{d}u}{\mathrm{d}x}\mathrm{d}x+\int_0^lwb\mathrm{d}x=0,\quad\forall w\text{且}w(l)=0
\]
把 \(\sigma=E\frac{\mathrm{d}u}{\mathrm{d}x}\)代入(8)
\[(wA\sigma)_{x=l}-(wA\sigma)_{x=0}-\int_0^l\frac{\mathrm{d}w}{\mathrm{d}x}AE\frac{\mathrm{d}u}{\mathrm{d}x}\mathrm{d}x+\int_0^lwb\mathrm{d}x=0,\quad\forall w\text{且}w(l)=0
\]
因为 $ w(l) = 0 $,且由 (2)式得到 $ (wA\sigma){x=0} = -(wAt) $(应力边界条件),将这些条件代入 (8) 式,得
\[\int_0^l\frac{\mathrm{d}w}{\mathrm{d}x}AE\frac{\mathrm{d}u}{\mathrm{d}x}\mathrm{d}x=\int_0^lwb\mathrm{d}x+\left(wA\bar{t}\right)_{x=0},\quad\forall w\text{且}w(l)=0
\]
应力边界条件自然满足, 自然边界条件。
动力学方程的弱形式
寻找 \(u(x)\)且 \(u(l)=\hat{u}\), 同时满足
\[\int_{0}^{l} \frac{dw}{dx} AE \frac{du}{dx} dx + \int_{0}^{l} w \rho A \frac{\partial^2 u}{\partial t^2} dx = \int_{0}^{l} wbdx + (wAt)_{x = 0} = 0, \quad \forall w \text{ 且 } w(l) = 0
\]
新增的等式左边的第二项是惯性力。
由伽辽金加权余量法求解 11
\[\begin{aligned}&\sum_{e=(1)}^{(n_e)}\left\{\int_{x_1^e}^{x_2^e}\left(\frac{\mathrm{d}w^e}{\mathrm{d}x}\right)^\mathrm{T}AE\left(\frac{\mathrm{d}u^e}{\mathrm{d}x}\right)\mathrm{d}x\right.\\&\left.+\int_{x_1^e}^{x_2^e}w^e\rho A\frac{\partial^2u^e}{\partial t^2}\mathrm{d}x-\int_{x_1^e}^{x_2^e}(w^e)^\mathrm{T}b\mathrm{d}x-\left[(w^e)^\mathrm{T}A\bar{t}\right]_{x=0}\right\}=0\end{aligned}
\]
其中
\[\begin{aligned}\frac{\mathrm{d}u^e}{\mathrm{d}x}&=B^eu^e\\\left(\frac{\mathrm{d}w^e}{\mathrm{d}x}\right)^\mathrm{T}&=(w^e)^\mathrm{T}(B^e)^\mathrm{T}\end{aligned}
\]
13 代入 12
\[\begin{aligned}&\sum_{e=(1)}^{(n_e)}(w^e)^\mathrm{T}\left\{\underbrace{\int_{x_1^e}^{x_2^e}(\boldsymbol{B}^e)^\mathrm{T}AE\boldsymbol{B}^e\mathrm{d}x}_{\boldsymbol{K}^e}\boldsymbol{u}^e+\underbrace{\int_{x_1^e}^{x_2^e}\rho A(\boldsymbol{N}^e)^\mathrm{T}\boldsymbol{N}^e\mathrm{d}x}_{\boldsymbol{M}^e}\ddot{\boldsymbol{u}}^e\right.\\&-\underbrace{\int_{x_1^e}^{x_2^e}(\boldsymbol{N}^e)^\mathrm{T}b\mathrm{d}x}_{\boldsymbol{f}_{\Omega^e}}-[\underbrace{(\boldsymbol{N}^e)^\mathrm{T}A\bar{t}}_{\boldsymbol{f}_{\Gamma_t^e}}]_{x=0}\end{aligned}
\]
利用\(w^e\)的任意性,得到整个系统的动力学方程
\[M\ddot{\boldsymbol{u}}(t)+\boldsymbol{Ku}(t)=\boldsymbol{f}(t)
\]
质量矩阵,刚度矩阵,节点载荷矩阵
\[M=\sum_{e=(1)}^{(n_e)}M^e,\quad K=\sum_{e=(1)}^{(n_e)}K^e,\quad f=\sum_{e=(1)}^{(n_e)}f^e(t)
\]
\[\begin{aligned}&\boldsymbol{M}^e=\int_{x_1^e}^{x_2^e}\rho A(\boldsymbol{N}^e)^\mathrm{T}\boldsymbol{N}^e\mathrm{d}x\\&K^e=\int_{x_1^e}^{x_2^e}(\boldsymbol{B}^e)^\mathrm{T}AE\boldsymbol{B}^e\mathrm{d}x\\&f^e(t)=\int_{x_1^e}^{x_2^e}(\boldsymbol{N}^e)^\mathrm{T}b\mathrm{d}x+\left[(\boldsymbol{N}^e)^\mathrm{T}A\bar{t}\right]_{x=0}\end{aligned}
\]
参考教程
-
Jacob Fish, A First Course in Finite Elements , 2007, 42

 浙公网安备 33010602011771号
浙公网安备 33010602011771号