题解 Frog 3
题目描述
将一个序列分成若干段,每一段的价值为 \((h_i-h_j)^2+C\),求价值和的最小值。
具体思路
设 \(f_i\) 表示前 \(i\) 个数分成若干段的价值和的最小值,并且 \(j+1 \sim i\) 被分成了一段。
那么 \(f_i\) 的状态应该由 \(f_j\) 转移过来。
状态转移方程:
形如:
这一类动态规划的优化分为三种:单调队列,斜率优化,四边形不等式。
而这几种优化方式对应的状态转移方程是不同的。
单调队列:单调队列对应的 \(val\) 一般是一次的,这题不符合。
斜率优化:斜率优化对应的 \(val\) 一般是二次的,这题符合。
四边形不等式:四边形不等式对应的 \(val\) 需要满足四边形不等式。
我们现在面临选择斜率优化还是四边形不等式优化。显然斜率优化的时间复杂度 \(O(n)\) 是要优于四边形不等式的时间复杂度 \(O(n \log n)\) 的,因此我们考虑斜率优化。
这里考虑将状态转移方程式化为截距式:\(b=y-kx\)。
令 \(b=f_i-h_i^2-C\),\(y=f_j+h_j^2\),\(k=2h_i\),\(x=h_j\)。
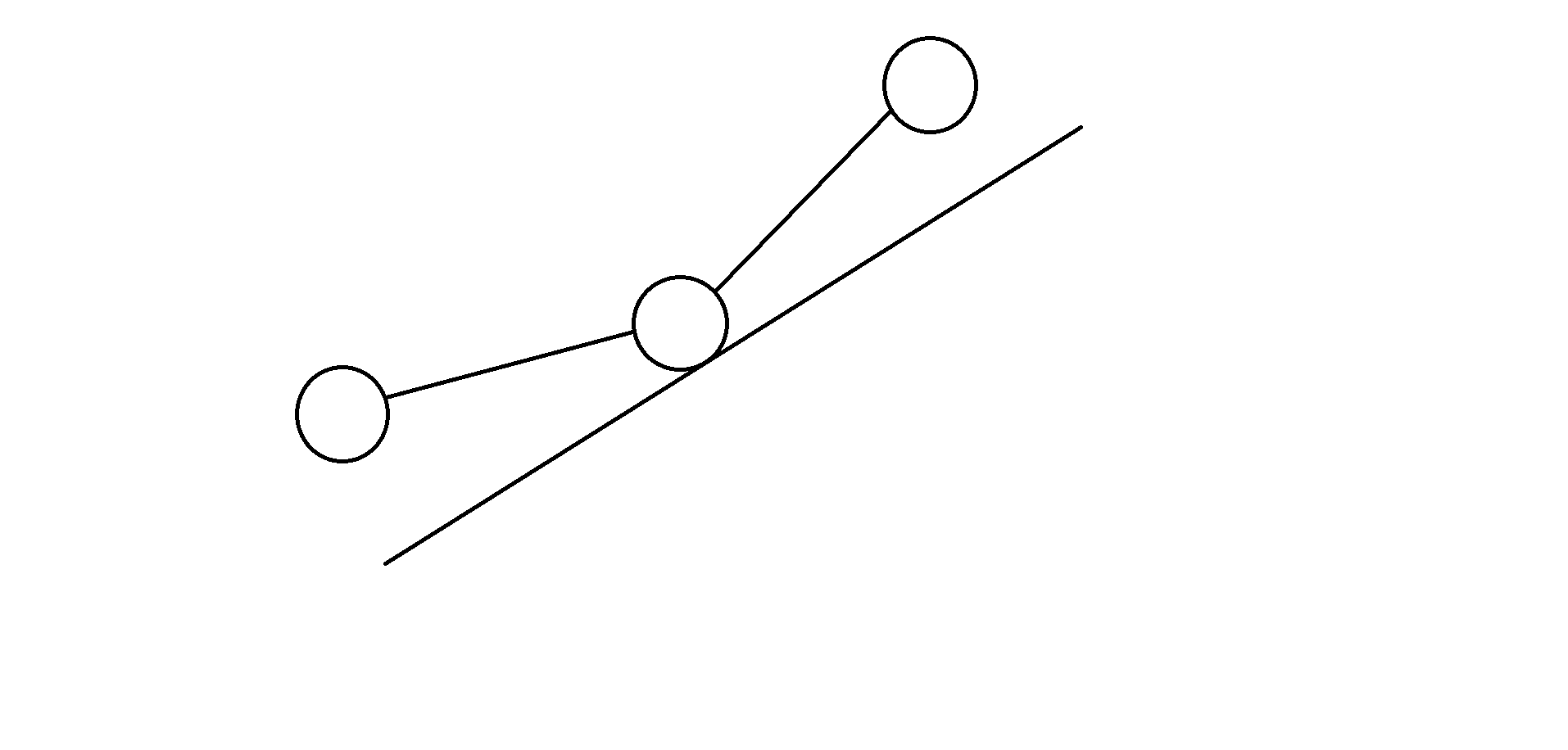
由于题目中说 \(h_i\) 单调递增,这里的斜率 \(k\) 应该是单调递增的,因此维护下凸壳。
那么我们该怎么维护呢?
我们说了,斜率是单调的,那么自然就想到用单调队列维护下凸壳。
显然,我们每次的最优决策点,即让截距 \(b\) 取到的最小值的点 \(j\),应当满足它左边的斜率小于当前的斜率,右边的斜率大于当前的斜率。
因此我们取队头时应当将所有斜率小于等于 \(k\) 的点全部踢出单调队列。
然后我们在队尾维护单调队列的斜率单调递增,即每次将斜率比当前直线斜率大的踢出单调队列。
注意
青蛙一开始站在第一块石头上,因此 dp 要从 \(2\) 开始。
Code
#include<bits/stdc++.h>
using namespace std;
typedef long long LL;
const int N=211000;
LL h[N],f[N];
int l,r,Q[N];
double X(int j){return 1.0*h[j];}
double Y(int j){return 1.0*(f[j]+h[j]*h[j]);}
double slop(int j1,int j2){
if(X(j2)==X(j1))return 1e18;
return (Y(j2)-Y(j1))/(X(j2)-X(j1));
}
int main(){
int n;LL c;scanf("%d%lld",&n,&c);
for(int i=1;i<=n;i++){
scanf("%lld",&h[i]);
}
memset(f,0x3f,sizeof(f));
f[1]=0;
l=1,r=1,Q[l]=1;
for(int i=2;i<=n;i++){
while(l<r&&slop(Q[l],Q[l+1])<=2.0*h[i])l++;
int j=Q[l];
f[i]=f[j]+(h[i]-h[j])*(h[i]-h[j])+c;
while(l<r&&slop(Q[r-1],Q[r])>=slop(Q[r],i))r--;
Q[++r]=i;
}
printf("%lld",f[n]);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号