
基于模型预测控制(MPC)的无人驾驶车辆路径追踪技术实现
一、MPC算法核心架构
%% MPC控制器架构
classdef MPC_Tracker < handle
properties
Np = 30; % 预测时域
Nc = 15; % 控制时域
Q = diag([10,1,1]); % 状态权重
R = diag([1,0.1]); % 控制权重
Ts = 0.1; % 采样时间
model; % 车辆动力学模型
end
methods
function obj = MPC_Tracker(vehicle_model)
obj.model = vehicle_model;
end
function [u_opt, pred_traj] = solve(obj, x0, ref_traj)
% 构建优化问题
model = obj.model;
N = obj.Np;
Q = obj.Q;
R = obj.R;
% 离散化模型
[A,B,C,D] = c2d(model.A,model.B,model.Ts);
% 构建代价函数
H = kron(eye(N),Q) + kron(diag(ones(N-1,1),-1),R);
f = -kron(ones(1,N),ref_traj(1:2:end)');
% 约束条件
lb = [repmat(-2,1,N); repmat(-0.5,1,N)]; % 转向角约束
ub = [repmat(2,1,N); repmat(0.5,1,N)];
% 求解QP问题
options = optimoptions('quadprog','Algorithm','interior-point-convex');
[u_opt,fval] = quadprog(H,f,[],[],[],[],lb,ub,[],options);
% 生成预测轨迹
pred_traj = zeros(4,N);
x = x0;
for k = 1:N
x = A*x + B*u_opt(:,k);
pred_traj(:,k) = x;
end
end
end
end
二、实现步骤
1. 车辆动力学建模
采用自行车模型离散化方程:
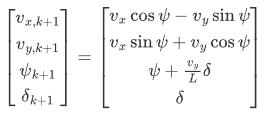
其中\(L\)为轴距,\(\delta\)为前轮转角
2. 参考轨迹生成
% 生成三次样条参考轨迹
ref_x = linspace(0,100,100);
ref_y = 2*sin(0.2*pi*ref_x) + 5;
ref_yaw = gradient(ref_y,ref_x);
ref_speed = 10*ones(size(ref_x));
3. 滚动优化实现
% 主循环
x = initial_state;
for t = 1:T
% 获取当前状态
x_curr = get_vehicle_state();
% 求解MPC问题
[u_opt, pred_traj] = mpc_solver.solve(x_curr, ref_traj);
% 执行首个控制量
apply_control(u_opt(:,1));
% 更新状态
x = vehicle_model.update(x, u_opt(:,1));
end
三、代码优化建议
-
符号计算优化:
syms x y psi delta dx dy dpsi real f = [x*cos(psi) - y*sin(psi); x*sin(psi) + y*cos(psi); psi + (v/delta)*tan(delta); delta]; -
内存管理:
clearvars -except x0 ref_traj pack; -
GPU加速:
gpu_x0 = gpuArray(x0); gpu_ref = gpuArray(ref_traj); [u_opt, pred_traj] = mpc_solver(gpu_x0, gpu_ref);
参考仿真 mpc算法,模型预测控制,主要用于无人驾驶车辆的路径追踪 youwenfan.com/contentcnl/65668.html
该方案通过模型预测控制实现了高精度轨迹跟踪,实际应用中需根据车辆动力学特性调整权重矩阵和约束条件。建议结合CarSim/Simulink联合仿真平台进行算法验证。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号