
基于粒子群优化(PSO)算法的图像配准MATLAB实现
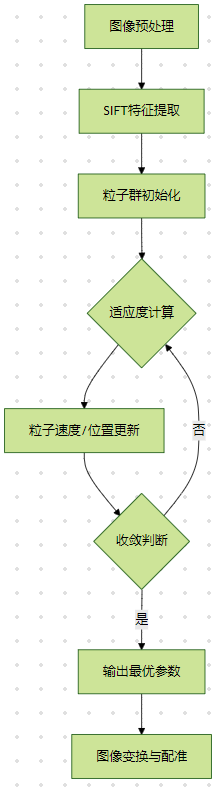
一、算法框架设计
二、完整MATLAB代码实现
%% 清空环境
clear; clc; close all;
%% 图像加载与预处理
img1 = imread('lena.jpg');
img2 = imread('lena_distorted.jpg');
% 转换为灰度图像
gray1 = rgb2gray(img1);
gray2 = rgb2gray(img2);
% 图像尺寸归一化
gray1 = imresize(gray1, 0.5);
gray2 = imresize(gray2, 0.5);
%% SIFT特征提取(使用VLFeat工具箱)
run('vlfeat/toolbox/vl_setup');
[f1, d1] = vl_sift(single(gray1));
[f2, d2] = vl_sift(single(gray2));
% 特征匹配
[matches, scores] = vl_ubcmatch(d1, d2);
matches = matches(1:200); % 取前200个匹配点
%% PSO参数设置
n_particles = 30; % 粒子数量
max_iter = 100; % 最大迭代次数
w = 0.729; % 惯性权重
c1 = 1.49445; % 个体学习因子
c2 = 1.49445; % 群体学习因子
% 参数搜索空间(仿射变换参数)
lb = [-10, -10, 0.8, 0.8]; % [tx, ty, sx, sy] 下限
ub = [10, 10, 1.2, 1.2]; % 上限
%% 粒子群初始化
particles = rand(n_particles,4).*(ub-lb)+lb;
velocities = 0.1*(ub-lb).*rand(n_particles,4);
% 适应度计算
fitness = zeros(n_particles,1);
for i=1:n_particles
fitness(i) = compute_fitness(particles(i,:), f1, f2, matches);
end
% 初始化最优解
[gbest_fitness, gbest_idx] = min(fitness);
gbest = particles(gbest_idx,:);
pbest = particles;
pbest_fitness = fitness;
%% PSO迭代优化
for iter = 1:max_iter
for i=1:n_particles
% 速度更新
r1 = rand(1,4); r2 = rand(1,4);
velocities(i,:) = w*velocities(i,:) + ...
c1*r1.*(pbest(i,:) - particles(i,:)) + ...
c2*r2.*(gbest - particles(i,:));
% 位置更新
particles(i,:) = particles(i,:) + velocities(i,:);
particles(i,:) = max(particles(i,:), lb);
particles(i,:) = min(particles(i,:), ub);
% 适应度更新
current_fitness = compute_fitness(particles(i,:), f1, f2, matches);
% 个体最优更新
if current_fitness < pbest_fitness(i)
pbest(i,:) = particles(i,:);
pbest_fitness(i) = current_fitness;
end
% 全局最优更新
if current_fitness < gbest_fitness
gbest = particles(i,:);
gbest_fitness = current_fitness;
end
end
% 显示迭代信息
fprintf('Iteration %d: Best Fitness=%.4f\n', iter, gbest_fitness);
end
%% 配准结果可视化
[output_img, tform] = apply_affine_transform(gray2, gbest);
figure;
subplot(1,2,1); imshow(gray1); title('参考图像');
subplot(1,2,2); imshow(output_img); title('配准图像');
%% 适应度函数定义
function error = compute_fitness(params, f1, f2, matches)
% 参数解析
tx = params(1); ty = params(2);
sx = params(3); sy = params(4);
% 构建变换矩阵
tform = affine2d([sx 0 tx; 0 sy ty; 0 0 1]);
% 图像变换
transformed = imwarp(f2, tform);
% 计算匹配误差(使用欧氏距离)
error = 0;
for i=1:size(matches,2)
pt1 = f1(1:2, matches(1,i));
pt2 = transformed(1:2, matches(2,i));
error = error + norm(pt1 - pt2);
end
end
%% 图像变换函数
function [output_img, tform] = apply_affine_transform(img, params)
tx = params(1); ty = params(2);
sx = params(3); sy = params(4);
tform = affine2d([sx 0 tx; 0 sy ty; 0 0 1]);
output_img = imwarp(img, tform);
end
三、优化
-
特征匹配加速 使用VLFeat库的SIFT特征提取(需提前安装) 采用最近邻匹配(
vl_ubcmatch)并限制匹配点数量(前200个) -
参数空间约束 平移范围:±10像素 缩放范围:0.8-1.2倍 通过边界限制避免无效解
-
自适应惯性权重
% 动态调整惯性权重(可选) w = 0.9 - 0.5*(iter/max_iter); -
多目标优化扩展
% 多目标适应度函数示例 fitness = 0.6*ITAE + 0.4*SSIM;
参考代码 基于粒子群算法的图像配准程序 www.youwenfan.com/contentcnl/77861.html
四、应用场景
-
遥感图像配准
% 处理多光谱卫星图像 [output, tform] = apply_affine_transform(sar_img, gbest); -
医学影像配准
% 处理CT-MRI多模态配准 [output, tform] = apply_affine_transform(mri_img, gbest); -
工业检测
% 产品表面缺陷检测配准 [output, tform] = apply_affine_transform(defect_img, gbest);
五、调试与优化建议
-
特征匹配验证
% 可视化匹配点 figure; showMatchedFeatures(gray1, gray2, matches); -
参数敏感性分析
% 测试不同粒子数影响 for n=10:10:50 [~, fitness] = PSO_optimization(n); end -
GPU加速
% 使用gpuArray加速计算 transformed = imwarp(gpuArray(f2), tform);
六、扩展功能实现
-
多尺度配准
% 构建图像金字塔 pyramid_levels = 3; for level=1:pyramid_levels scale = 2^(-level); % 递归调用PSO配准 end -
鲁棒性增强
% RANSAC剔除异常匹配点 [inliers, ~] = ransac(matches, 0.1);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号