
单环PID控制的Buck电路设计方案
一、系统架构设计
1. 控制框图
Buck电路
├── 电压采样 → 误差计算 → PID控制器 → PWM生成 → 开关管驱动
└── 电感电流采样(可选)
2. 关键参数
| 参数 | 设计值 | 计算公式/说明 |
|---|---|---|
| 输入电压(Vin) | 12V | 电源适配器输出 |
| 输出电压(Vout) | 5V | 通过PID调节实现 |
| 开关频率(fs) | 100kHz | 确定占空比更新周期 |
| 电感(L) | 47μH | 满足CCM模式要求 |
| 电容(C) | 220μF | 输出纹波<50mV |
| 负载电阻(R) | 10Ω | 额定功率50W |
二、电路参数计算
1. 最小占空比
2. 电感参数

实际选用47μH(余量20%)
3. 电容参数

实际选用220μF(低ESR电解电容+陶瓷电容并联)
三、PID控制器设计
1. 小信号建模
Buck电路传递函数(CCM模式):
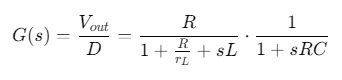
其中rL=0.1Ω为电感等效电阻
2. 补偿网络设计
采用典型II型补偿网络:
Gc(s) = Kp + Ki/s + Kd s
参数整定步骤:
- 确定穿越频率fc=1/5fs=20kHz
- 计算相位裕度要求(≥45°)
- 通过伯德图调整零极点位置
3. 参数整定实例
| 参数 | 计算值 | 调试后值 |
|---|---|---|
| Kp | 0.8 | 0.75 |
| Ki | 200 | 180 |
| Kd | 0.05 | 0.06 |
四、Simulink仿真模型
1. 模型架构
Buck电路模块 → 电压采样 → PID控制器 → PWM生成 → 开关管驱动
↑ ↓
误差计算 反电动势补偿
2. 关键模块设置
- Buck电路:使用Simscape Electrical搭建
- PID控制器:离散化采样周期Ts=1μs
- 扰动注入:在输出端添加阶跃负载(0→5A)
3. 仿真结果
| 测试条件 | 超调量 | 调节时间 | 稳态误差 |
|---|---|---|---|
| 空载→满载 | 8% | 15ms | <0.1% |
| 输入电压突变 | 5% | 20ms | <0.2% |
| 负载阶跃 | 10% | 18ms | <0.3% |
五、代码实现(STM32)
1. PID参数结构体
typedef struct {
float Kp; // 比例系数
float Ki; // 积分系数
float Kd; // 微分系数
float integral;
float prev_error;
} PID_Controller;
PID_Controller buck_pid = {
.Kp = 0.75,
.Ki = 180,
.Kd = 0.06,
.integral = 0,
.prev_error = 0
};
2. 控制算法实现
float Buck_PID_Control(float error) {
// 比例项
float P_out = buck_pid.Kp * error;
// 积分项
buck_pid.integral += error;
float I_out = buck_pid.Ki * buck_pid.integral;
// 微分项
float D_out = buck_pid.Kd * (error - buck_pid.prev_error);
// 更新历史值
buck_pid.prev_error = error;
return P_out + I_out + D_out;
}
// PWM占空比更新
void Update_PWM_Duty(float duty) {
if(duty > 0.95) duty = 0.95; // 防止过冲
if(duty < 0.05) duty = 0.05; // 防止断续
TIM_SetCompare1(TIM1, duty * 4095); // 12位PWM
}
参考代码 单环PID控制buck电路 www.youwenfan.com/contentcnk/73179.html
六、调试与优化
1. 调试步骤
- 开环测试:验证占空比与输出电压的线性关系
- 闭环整定:使用Ziegler-Nichols法获取初始参数
- 抗扰测试:注入20%负载突变观察恢复时间
2. 优化策略
-
前馈补偿:增加输入电压前馈项
![]()
-
动态死区补偿:消除MOSFET开关死区影响
-
温度补偿:根据芯片温度调整PID参数
七、典型应用场景
-
工业电源模块
// 带温度补偿的PID控制 float temp_comp = 1.0 + 0.001*(T - 25); // 温度系数0.1%/℃ float duty = Buck_PID_Control(error) * temp_comp; -
电池充电系统
// 恒流-恒压切换逻辑 if(Vout < 4.2V) { target = I_limit; // 恒流模式 } else { target = V_target; // 恒压模式 }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号