【教程】ubuntu安装_黑屏修复_常用软件配置教程
一、系统盘
- 软件
- 名称:rufus
- 链接:https://rufus.ie/zh/
- 系统镜像
这里我选择的版本:
-
rufus-4.11p
-
ubuntu-24.04.03-desktop-amd64.iso
二、安装配置
系统安装都好说,跟windows一样,进入bios,选择启动项,设置U盘启动。
如果是N卡,可能会出现卡死在启动页的问题(卡了我两个小时)。
2.1 卡死在启动页
重启电脑,在这里(我找了张网图,自己没拍),按 "e"。
进入命令行编辑界面,找到 "quiet splash",在后面追加 "nomodeset",然后按F10保存并执行,即可正常进入安装界面。
2.2 分区
我这里是1TB固态+10TB机械,因此简单粗暴:
- swap
- 8GB 固态
- boot
- 1GB 固态
- /
- 剩余固态
- /home
- 10TB机械
2.3 重启卡死在启动页
出现这种问题可能是安装系统时显卡驱动安装失败、冲突、未安装等情况。
系统安装完成后,拔掉U盘重启,卡死启动页。
这里较为麻烦,因为无法直接进入grub gui,需要纯命令行添加nomodeset配置。
- 重启电脑,在弹出品牌名称后,开始按esc,慢按即可;
- 之后会进入grub的commands界面,只能输入命令;
set pager=1
ls # 看看有哪些分区,如 (hd0,gpt1) (hd0,gpt2) ...
ls (hd0,gpt2)/boot/grub # 逐个试,直到能看到 grub.cfg 的那个分区
set root=(hd0,gpt2) # 换成你刚才试出来的那一分区name
set prefix=(hd0,gpt2)/boot/grub
set timeout_style=menu
set timeout=10
insmod normal
configfile /boot/grub/grub.cfg
- 重启电脑,在弹出品牌名称后,开始按esc,慢按即可;
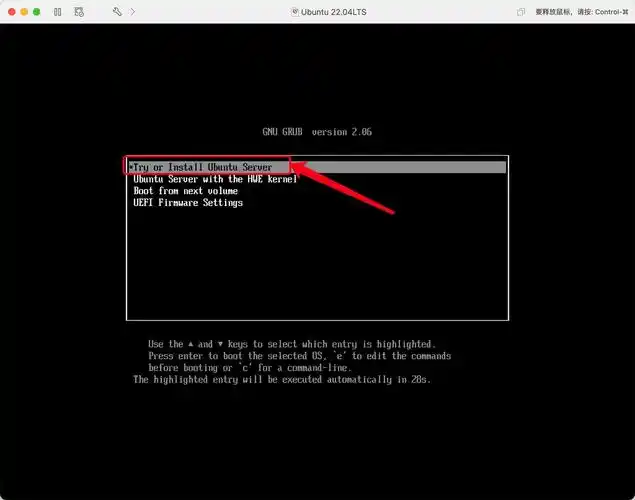
- 这样就能进入grub gui(下为网图,通过方向键选择第一个ubuntu),然后按 "e";
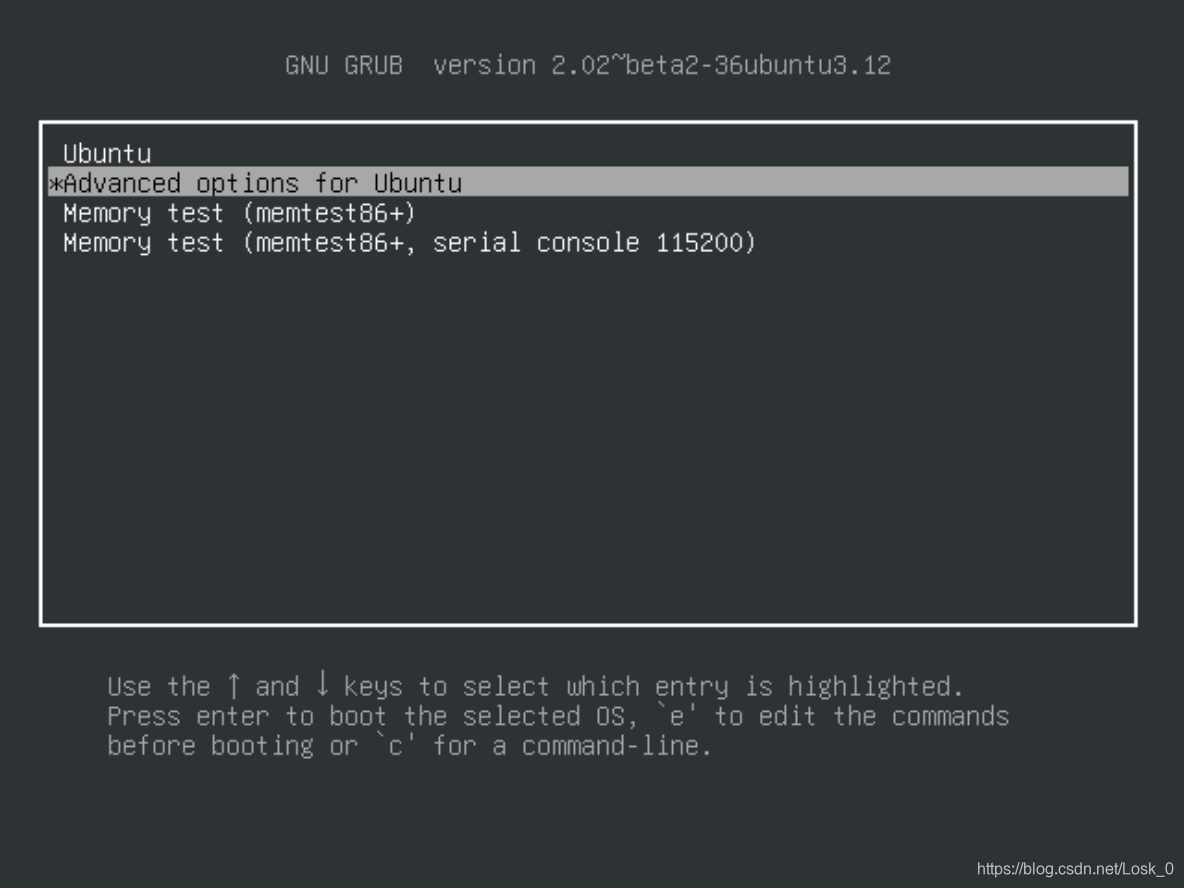
- 之后跟2.1一样,找到 "quiet splash",在后面追加 "nomodeset",然后按F10保存并执行,即可正常进入桌面。
- 一般情况下,接下来需要重装驱动,见 "三"。
三、驱动问题
只要进了系统,问题就好解决了。
启动terminal
sudo apt update
# 卸载可能残留/冲突的包
sudo apt purge -y 'nvidia-*' 'libnvidia-*' 'xserver-xorg-video-nouveau' || true
# 查看可安装的驱动
sudo ubuntu-drivers devices
# 这里一定要选择一个没有 "open" 字样的驱动,最好是能安装的最新版的前一级,如能装580,那么就选择570。
sudo apt install -y nvidia-driver-570
安装完成后不着急重启,需要检查一下刚刚在开机时写入的配置是否存在,如果存在需要移除。
sudo vim /etc/default/grub
# 把这行里的 nomodeset 删掉
# GRUB_CMDLINE_LINUX_DEFAULT="quiet splash"
sudo update-grub
# 重启
sudo reboot
在terminal中检查
nvidia-smi # 能显示显卡与驱动版本即成功
over~
四、常用配置和软件
4.1 ssh
安装
sudo apt update
sudo apt install -y openssh-server
sudo systemctl enable --now ssh
sudo systemctl status ssh # 确认 active (running)
ss -tnlp | grep ':22' # 确认 22 端口在监听
允许密码登录
sudo vim /etc/ssh/sshd_config
PasswordAuthentication yes
PubkeyAuthentication yes
UsePAM yes
PermitRootLogin prohibit-password # 不允许root用密码直接登录
# 保存并退出,重启ssh服务
sudo systemctl reload ssh
配置防火墙
sudo apt install -y ufw
# 缺省策略:禁止所有入站、允许出站
sudo ufw default deny incoming
sudo ufw default allow outgoing
# 允许内网网段的 SSH 访问
sudo ufw allow from 192.168.0.0/16 to any port 22 proto tcp
# 开启防火墙
sudo ufw enable
sudo ufw status verbose
测试
# 查看在局域网的ip
ip -4 addr show | grep -A2 'state UP' | grep 'inet '
# 在另一台电脑,使用自己创建的用户进行测试
ssh zhaoshuai@192.168.xx.xx
4.2 多用户之间能够访问和拷贝
在root下创建一个脚本,将home/xxx全做成755即可。
755代表
7 = 111 = rwx(读、写、执行)→ 属主
5 = 101 = r-x(读、执行)→ 同组
5 = 101 = r-x(读、执行)→ 其他人
脚本process_home_folder
# 创建脚本
vim ~/app/process_home_folder
# 写入内容
#!/usr/bin/env bash
set -Eeuo pipefail
for d in /home/*; do
[ -d "$d" ] || continue # 只处理目录
b="$(basename "$d")"
[ "$b" = "lost+found" ] && continue # 避免处理 /home/lost+found
chmod 755 "$d"
done
echo "All done."
# 保存并退出后
# 赋予执行权限并运行
sudo chmod +x process_home_folder
sudo ./process_home_folder
4.3 用户自己安装conda隔离环境
下载miniconda3安装包
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/Downloads/miniconda.sh
# 这里我下载到了自定义目录,大家可以随意更改目录
静默安装到~/app/miniconda3(也随意修改)
bash ~/Downloads/miniconda.sh -b -p ~/app/miniconda3
初始化环境
~/app/miniconda3/bin/conda init
关闭当前窗口,重新打开,测试
conda --version
简单使用,创建一个虚拟环境
conda create -n test_env python=3.9 -y
# 第一次用时,需要按照提示输入a (accept)
# 激活环境
conda activate test_env
4.4 frp配置
仅限root用户进行配置,此处仅给出客户端部分配置,完整配置见:
https://www.cnblogs.com/quantoublog/articles/19034249
- 创建fprc用户,不能登录,仅用于管理frpc
sudo useradd -r -s /bin/false frpc
# 其中 -r 表示 --system 创建一个系统账户,不会创建用户主目录(/home/frpc)
# -s /bin/false 选项:禁止登录
- 下载并解压frpc到/opr/frpc;
- 修改frpc.toml,开发指定端口,与云服务器做好映射;
- 创建自启项
sudo vim /etc/systemd/system/frpc.service
- 编写配置
[Unit]
Description = Fast Reverse Proxy Client
# 网络服务启动后运行本服务
After = network.target
[Service]
Type = simple
# 使用 frpc 低权限用户运行
User = frpc
Group = frpc
ExecStart = /opt/frp/frpc -c /opt/frp/frpc.toml
# 重启策略,保证程序崩溃后自动重启
Restart = always
RestartSec = 5s
[Install]
WantedBy = multi-user.target
- 重载systemd配置
sudo systemctl daemon-reload
- 启动frpc服务
sudo systemctl start frpc
- 设置开机自启
sudo systemctl enable frpc
- 检查运行状态
sudo systemctl status frpc
4.5 个人用户配置免密登录
参考:https://www.cnblogs.com/quantoublog/articles/19034249
- 生成ssh key(生成过可不做)(在本地电脑执行)
ssh-keygen -t rsa -b 4096 -C "your_email@example.com"
- 配置内网机免密(在内网机操作)
mkdir -p ~/.ssh
chmod 700 ~/.ssh
# 编辑 authorized_keys 文件,将本地的公钥粘贴进去
vim ~/.ssh/authorized_keys
# 设置 authorized_keys 文件权限
chmod 600 ~/.ssh/authorized_keys
# 退出会话并重新测试
exit
4.6 安装和配置mujoco
这里使用pypi安装mujoco,是目前最简单最容易上手的方式。
前置条件:4.3
- 创建使用mujoco的虚拟环境
conda create -n mujoco_env python=3.12
- 安装mujoco
conda activate mujoco_env
pip install mujoco
- 上传模型文件,这里我们用零一造物的模型(在本地windows shell中操作)
# 零一造物仓库:https://gitee.com/dearxie/zero-robotic-arm
# 我的fork:https://github.com/freshmakerzhao/zero-robotic-arm
# 模型路径:3. Simulink\URDF_XG_Robot_Arm_Urdf_V1_1
# 格式: scp -r /本地目录 hostname:/远程目录
# 格式: scp /本地文件 hostname:/远程目录
scp "E:\Workspace_robot\zero-robotic-arm-master\3. Simulink\URDF_XG_Robot_Arm_Urdf_V1_1.tar" 801_via_ali:~/Downloads
- 安装urdf2mjcf
# 用于将URDF (Unified Robot Description Format) 格式转换为 MJCF (MuJoCo XML Format)
pip install urdf2mjcf
- 转换
# 找到上传的模型文件并解压,之后通过urdf2mjcf转换成xml,供mujoco使用
urdf2mjcf --output robot_arm_mujoco.xml URDF_XG_Robot_Arm_Urdf_V1_1/urdf/URDF_XG_Robot_Arm_Urdf_V1_1.urdf
- 启动
# 二进制版本和源码编译版本直接在bin路径下面启动./simulate
# python版本通过下面的命令
python -m mujoco.viewer
# 可启动后将xml或udrf拖拽进去
# 带文件启动
python -m mujoco.viewer --mjcf=xxxxx.xml
4.7 中文输入法
之前的教程基本都是用ibus输入法框架,安装搜狗输入法,现在有更好用的框架fcitx5。
- 安装
sudo apt update
sudo apt install -y \
fcitx5 \
fcitx5-chinese-addons \
fcitx5-config-qt \
fcitx5-frontend-gtk3 \
fcitx5-frontend-qt5 \
fcitx5-module-cloudpinyin \
im-config
im-config -n fcitx5
- 设置
- 打开 系统设置 → 地区与语言(Region & Language)
- 找到 输入法(Input Method) 或 管理已安装的语言(Manage Installed Languages)
- 在 键盘输入法系统 里选择
fcitx5
- 配置
- 重启电脑
- 进入桌面后fcitx5会弹出是否现在配置,点击yes,或者在teminal中输入
Fcitx Configuration进行配置
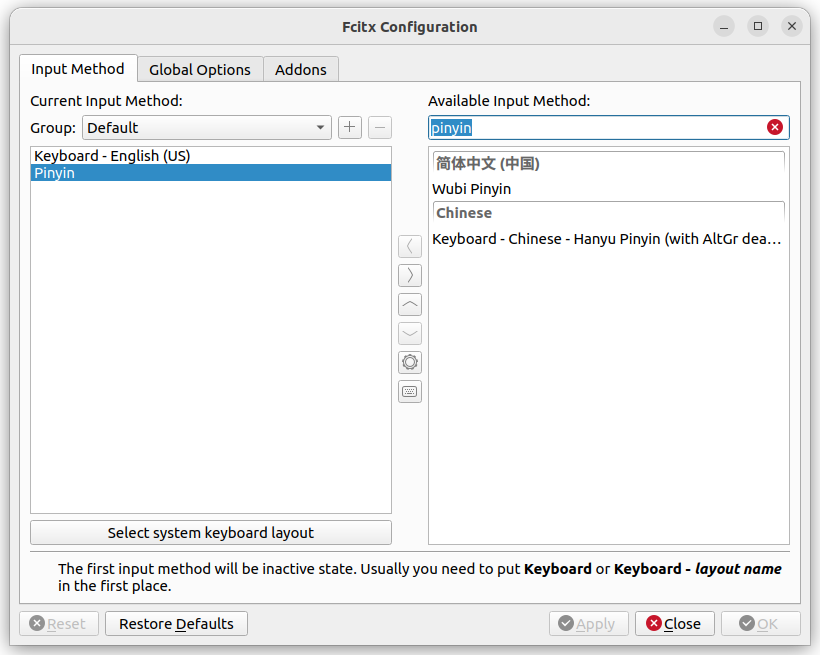
右侧搜索pinyin,点击向左的箭头加入group,点击apply即可。
完成后,使用ctrl+space切换中英文输入。
五、常用命令
- 安装本地deb文件
sudo dpkg -i /path/to/example.deb
- tar
scp "E:\File_download\frp_0.64.0_linux_amd64.tar.gz" zhaoshuai@192.168.100.101:/home/Downloads/
- 创建用户
sudo adduser newuser
- 生成ssh密钥
ssh-keygen -t rsa -b 4096 -C "dsupermaker@163.com"

 浙公网安备 33010602011771号
浙公网安备 33010602011771号