ROS通信机制
ROS是进程(也称为Nodes)的分布式框架。
ROS 中的基本通信机制主要有如下三种实现策略:
-
话题通信(发布订阅模式)
-
服务通信(请求响应模式)
- 参数服务器(参数共享模式)
一、话题通信
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。
1.1概念
以发布订阅的方式实现不同节点之间数据交互的通信模式。
1.2作用
用于不断更新的、少逻辑处理的数据传输场景。
1.2.1 理论模型
话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (发布者)
- Listener (订阅者)
ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 Listener,帮助 Talker 与 Listener 建立连接,连接建立后,Talker 可以发布消息,且发布的消息会被 Listener 订阅。
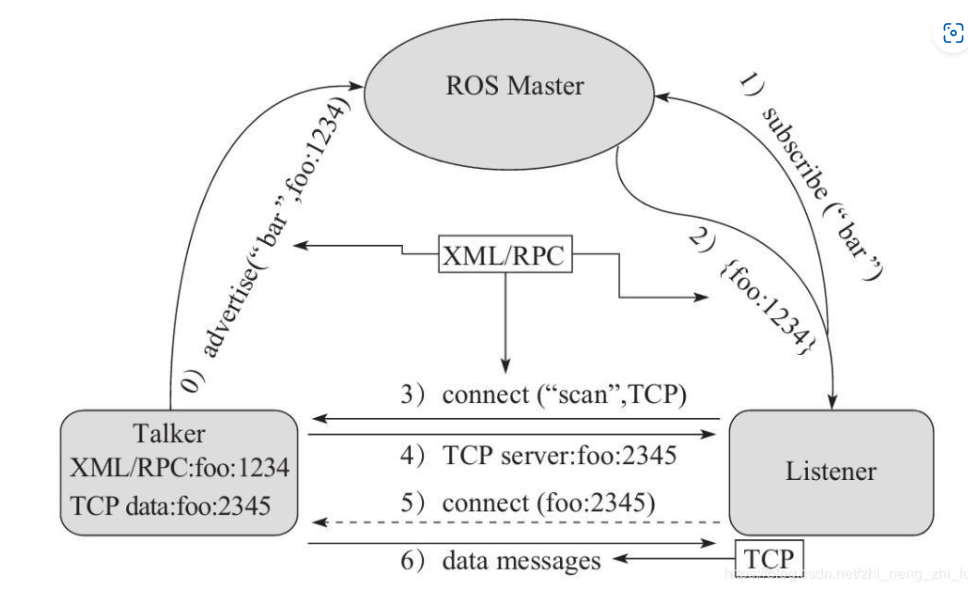
0.Talker注册
Talker启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含所发布消息的话题名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Listener注册
Listener启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要订阅消息的话题名。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Talker 和 Listener,并通过 RPC 向 Listener 发送 Talker 的 RPC 地址信息。
3.Listener向Talker发送请求
Listener 根据接收到的 RPC 地址,通过 RPC 向 Talker 发送连接请求,传输订阅的话题名称、消息类型以及通信协议(TCP/UDP)。
4.Talker确认请求
Talker 接收到 Listener 的请求后,也是通过 RPC 向 Listener 确认连接信息,并发送自身的 TCP 地址信息。
5.Listener与Talker建立连接
Listener 根据步骤4 返回的消息使用 TCP 与 Talker 建立网络连接。
6.Talker向Listener发送消息
连接建立后,Talker 开始向 Listener 发布消息。
注意1:上述实现流程中,前五步使用的 RPC协议,最后两步使用的是 TCP 协议
注意2: Talker 与 Listener 的启动无先后顺序要求
注意3: Talker 与 Listener 都可以有多个
注意4: Talker 与 Listener 连接建立后,不再需要 ROS Master。也即,即便关闭ROS Master,Talker 与 Listern 照常通信。
1.2.2 话题通信自定义msg
在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty.... 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息... std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型msgs只是简单的文本文件,每行具有字段类型和字段名称,可以使用的字段类型有:
-
int8, int16, int32, int64 (或者无符号类型: uint*)
-
float32, float64
-
string
-
time, duration
-
other msg files
-
variable-length array[] and fixed-length array[C]
ROS中还有一种特殊类型:Header,标头包含时间戳和ROS中常用的坐标帧信息。会经常看到msg文件的第一行具有Header标头。
二·、服务通信
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。
2.1 概念
以请求响应的方式实现不同节点之间数据交互的通信模式。
2.1.1 服务通信模型
服务通信较之于话题通信更简单些,理论模型如下图所示,该模型中涉及到三个角色:
- ROS master(管理者)
- Server(服务端)
- Client(客户端)
ROS Master 负责保管 Server 和 Client 注册的信息,并匹配话题相同的 Server 与 Client ,帮助 Server 与 Client 建立连接,连接建立后,Client 发送请求信息,Server 返回响应信息。
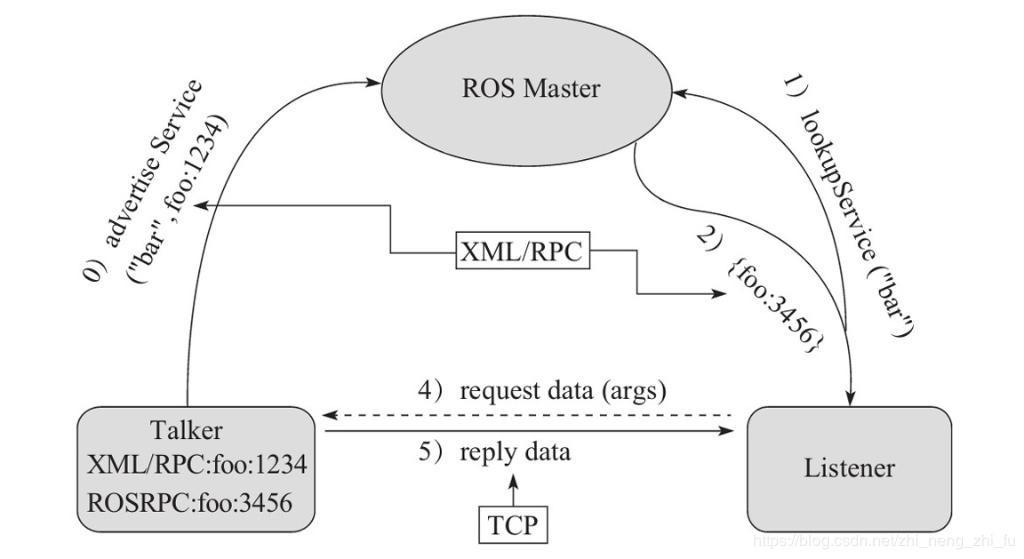
整个流程由以下步骤实现:;
0.Server注册
Server 启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含提供的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Client注册
Client 启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要请求的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Server和 Client,并通过 RPC 向 Client 发送 Server 的 TCP 地址信息。
3.Client发送请求
Client 根据步骤2 响应的信息,使用 TCP 与 Server 建立网络连接,并发送请求数据。
4.Server发送响应
Server 接收、解析请求的数据,并产生响应结果返回给 Client。
注意:
1.客户端请求被处理时,需要保证服务器已经启动;
2.服务端和客户端都可以存在多个。
2.1.2 服务通信自定义srv
需求:服务通信中,客户端提交两个整数至服务端,服务端求和并响应结果到客户端,请创建服务器与客户端通信的数据载体。
流程;srv文件内可用数据类型与msg文件一致,且定义srv实现流程与自定义msg实现流程类似:
-
按照固定格式创建srv文件
-
编辑配置文件
-
编译生成中间文件
1.定义srv文件
服务通信中,数据分成两部分,请求与响应,在 srv 文件中请求和响应使用---分割,具体实现如下:
功能包下新建 srv 目录,添加 xxx.srv 文件,内容:
# 客户端请求时发送的两个数字
int32 num1
int32 num2
---
# 服务器响应发送的数据
int32 sum
三、参数服务器
参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据,关于参数服务器的典型应用场景如下:
参数服务器,一般适用于存在数据共享的一些应用场景。
1. 概念
以共享的方式实现不同节点之间数据交互的通信模式。
2. 作用
存储一些多节点共享的数据,类似于全局变量。
3. 参数服务器理论模型
参数服务器实现是最为简单的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (参数设置者)
- Listener (参数调用者)
ROS Master 作为一个公共容器保存参数,Talker 可以向容器中设置参数,Listener 可以获取参数。
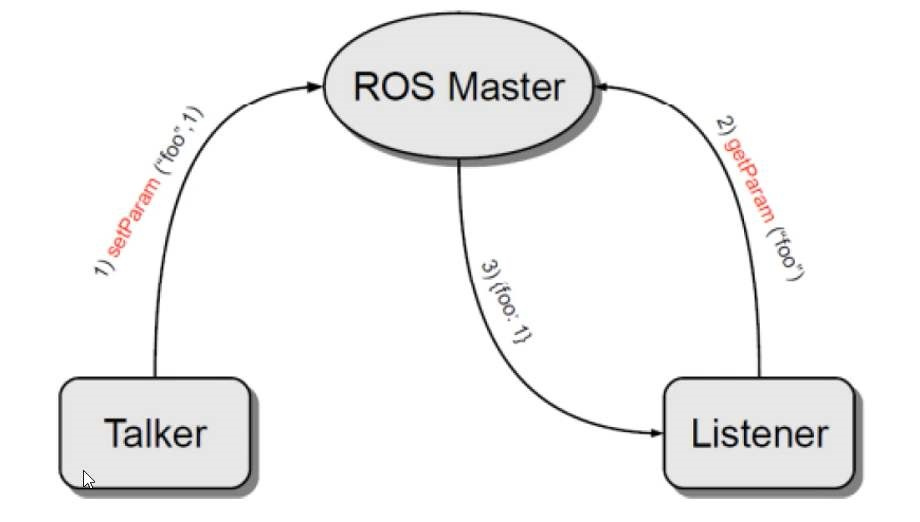
整个流程由以下步骤实现:
1.Talker 设置参数
Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
2.Listener 获取参数
Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
3.ROS Master 向 Listener 发送参数值
ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
参数可使用数据类型:
-
32-bit integers
-
booleans
-
strings
-
doubles
-
iso8601 dates
-
lists
-
base64-encoded binary data
-
字典
注意:参数服务器不是为高性能而设计的,因此最好用于存储静态的非二进制的简单数据
2.6 通信机制比较
三种通信机制中,参数服务器是一种数据共享机制,可以在不同的节点之间共享数据,话题通信与服务通信是在不同的节点之间传递数据的,三者是ROS中最基础也是应用最为广泛的通信机制。
这其中,话题通信和服务通信有一定的相似性也有本质上的差异,在此将二者做一下简单比较:
二者的实现流程是比较相似的,都是涉及到四个要素:
- 要素1: 消息的发布方/客户端(Publisher/Client)
- 要素2: 消息的订阅方/服务端(Subscriber/Server)
- 要素3: 话题名称(Topic/Service)
- 要素4: 数据载体(msg/srv)
可以概括为: 两个节点通过话题关联到一起,并使用某种类型的数据载体实现数据传输。
二者的实现也是有本质差异的,具体比较如下:
| Topic(话题) | Service(服务) | |
|---|---|---|
| 通信模式 | 发布/订阅 | 请求/响应 |
| 同步性 | 异步 | 同步 |
| 底层协议 | ROSTCP/ROSUDP | ROSTCP/ROSUDP |
| 缓冲区 | 有 | 无 |
| 时时性 | 弱 | 强 |
| 节点关系 | 多对多 | 一对多(一个 Server) |
| 通信数据 | msg | srv |
| 使用场景 | 连续高频的数据发布与接收:雷达、里程计 | 偶尔调用或执行某一项特定功能:拍照、语音识别 |
不同通信机制有一定的互补性,都有各自适应的应用场景。尤其是话题与服务通信,需要结合具体的应用场景与二者的差异,选择合适的通信机制。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号