基于CANoe的CAN XL测试实践
为了填补CAN网络与车载以太网之间带宽空白和满足现代汽车功能大容量数据传输需求,第三代CAN技术CAN XL诞生。它不仅有着高于CAN FD的速率(最高可达20Mbit/s),还能向下兼容CAN/CAN FD,在速度、成本和复杂性之间取得了良好平衡。
新技术的实际应用,离不开测试验证。那CAN XL测试与CAN/CAN FD测试之间的特殊点是什么,测试手法是否有差异,成为了我们测试最关心的部分。本文基于CAN XL的两种驱动模式(SIC/FAST),以测试实践的视角切入,对CAN XL通信测试做一个简单总结。
一、测试设备及环境搭建
1. 测试所需材料及设备
(1) 被测样件及线束
(2) 通信矩阵
(3) 硬件:供电电源(12V直流电源)、示波器(PicoScope6403E)、总线接口(VN1641)、终端电阻(120Ω/60Ω)
(4) 软件:CANoe、PicoSocpe 7 T&M
2. 测试设备主要功能
(1) 供电电源:给被测ECU供电
(2) PicoScope6403E/PicoSocpe 7 T&M:PicoScope6403E可以对CAN XL报文进行抓取,配合其上位机(PicoSocpe 7 T&M),对抓取的波形进行解码、测量,轻松实现总线电平/跳变沿时间/信号质量等测试
(3) VN1641/CANoe:VN1641可以捕捉被测ECU发送的所有CAN XL报文,配合其上位机(CANoe),将捕捉到的报文完整信息显示出来
(4) 终端电阻:用于测试链路的阻抗匹配
3. 测试环境搭建
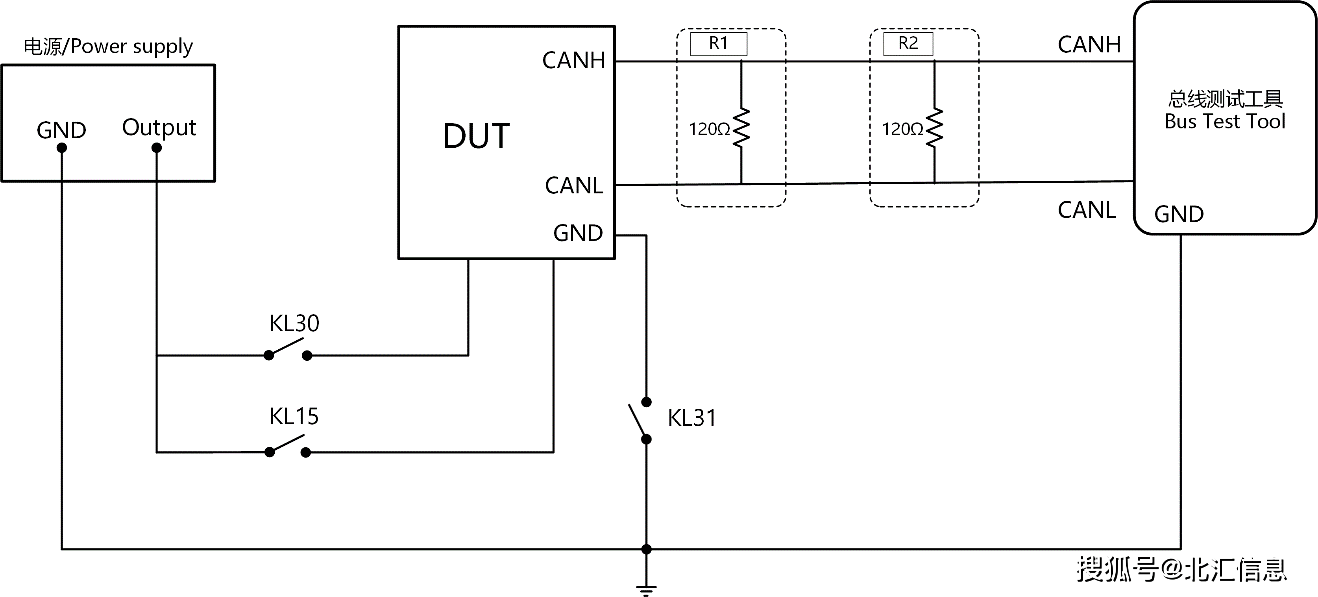
(1) 基于总线测试工具的测试环境:进行总线报文监测或仿真报文等测试
(2) 基于示波器的测试环境:进行示波器抓取分析波形等测试(由于FAST模式采用对称的推挽(Push-Pull)驱动方式(即level_0/level_1),使输出阻抗恒定匹配总线特性阻抗,有效抑制反射与振铃。因此使用示波器抓取波形时,SIC模式与FAST模式均以下图所示连接即可)
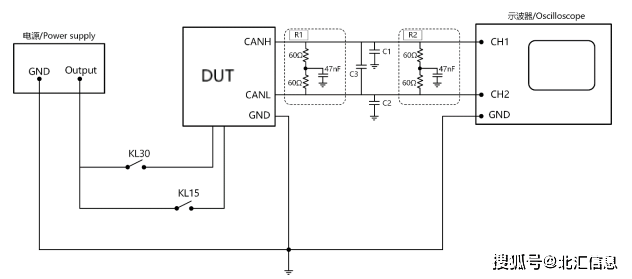 基于示波器的测试环境
基于示波器的测试环境二、SIC模式
1.模式介绍
该模式采用 NRZ(不归零)编码,逻辑 “0” 用 “显性” 状态表示,逻辑 “1” 用 “隐性” 状态表示,与CAN/ CAN FD 一致。CAN XL中在仲裁域使用此驱动模式(仲裁速率一般为500kbit/s-1Mbit/s,使用此驱动方式可以保证仲裁可靠性);当CAN XL在实际应用中速率要求较低时(≤8Mbit/s),也可以选择此驱动方式以降低成本,这样保留了大容量数据传输的需求(数据场最大2048个字节),且与CAN/CAN FD编码方式一致。
2.测试前配置
(1) 测试软件版本:CANoe19
(2) 样件信息:速率为仲裁域500K,CAN XL数据域8M;仲裁域与数据域均采用SIC模式
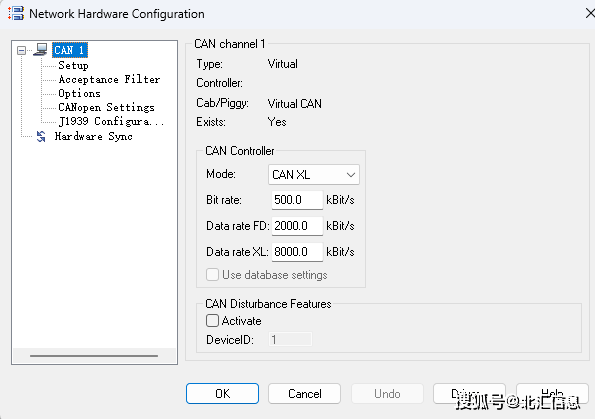
(3) Mode选择CAN XL
(4) 基于被测件设置速率
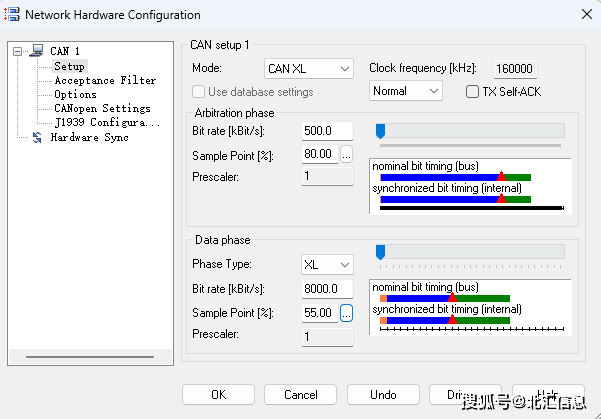
(5) 基于被测件设置采样点(在Data phase中Phase Type默认为FD,需要手动切换为XL后设置)
(6) 该驱动模式下可以兼容CAN/CAN FD,错误信号禁用(Error Signalling deactivated)需关闭,否则Tester不具备错误检查的能力
3.测试执行
由于仲裁域与数据域均采用SIC模式,能够与CAN/CAN FD兼容,所以测试手法大体相同,本次仅对于区别于CAN/CAN FD测试的部分进行介绍。
(1) 总线输出电平
以下是抓取的一帧CAN XL报文,由于均采用SIC模式,电平要求一致
 SIC模式报文示例
SIC模式报文示例
(2) 振铃测试
在CAN/CAN FD中,位填充方式为动态填充(即5个连续相同极性后插入一个相反极性)。在CAN XL中,仲裁域使用动态填充方式,数据域使用的是固定填充方式(每10位插入一个固定填充位),所以在做振铃测试时,应在数据域选取10个连续显性位+1个隐性位进行测试,如下图所示。
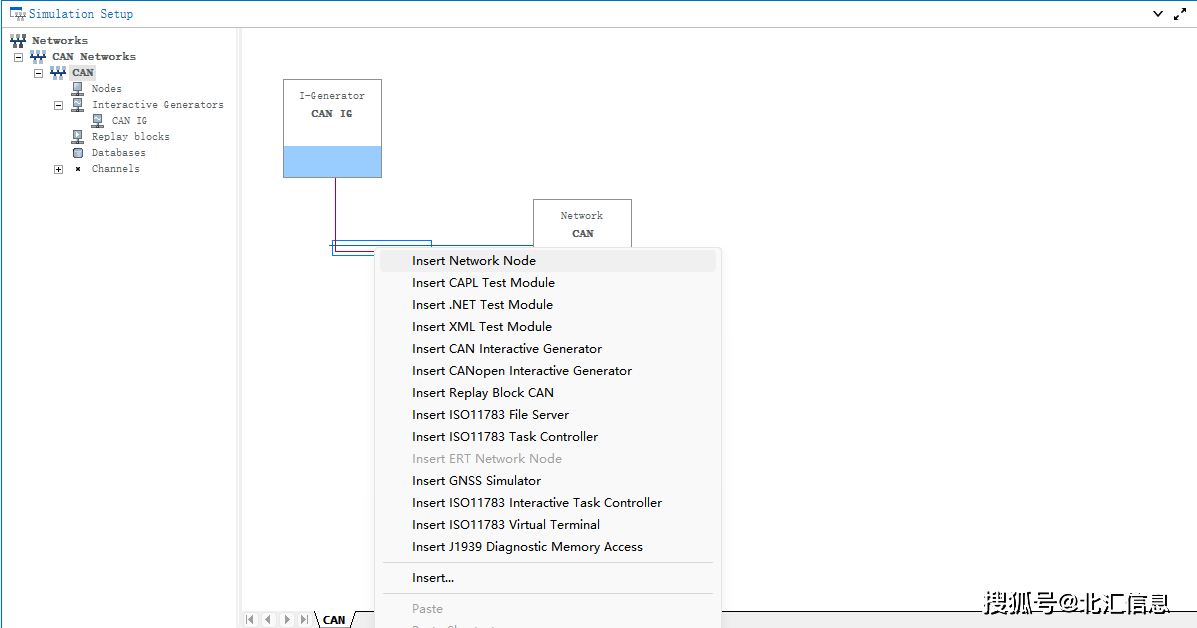
 点击添加图片描述(最多60个字)
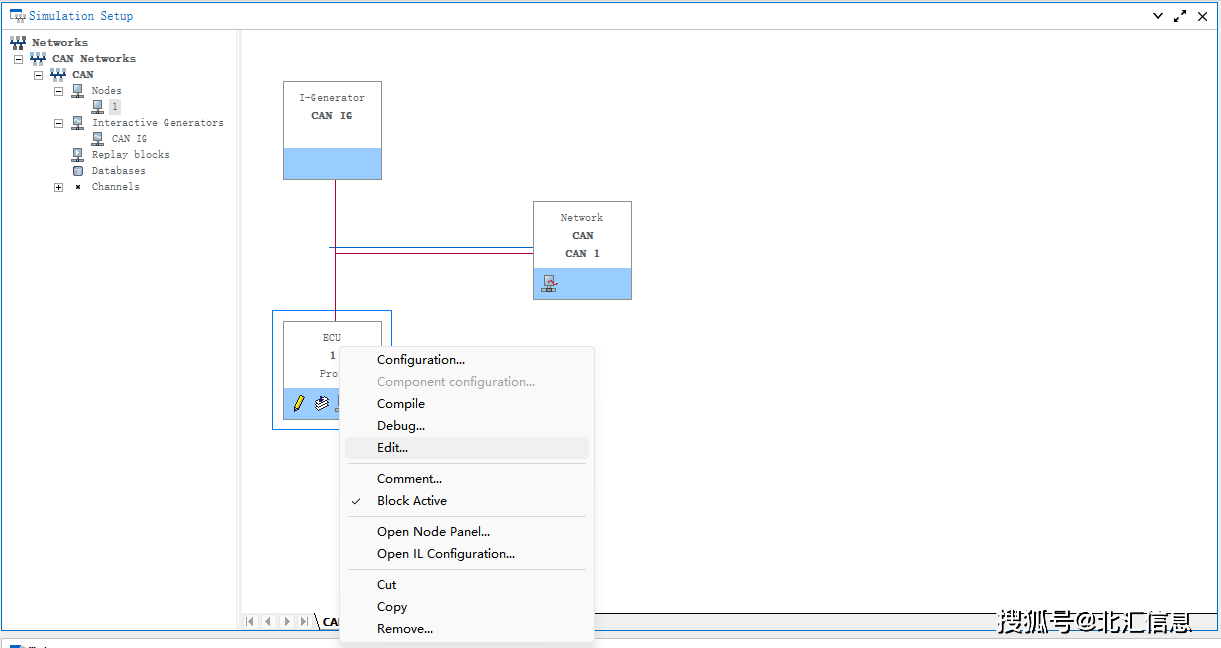
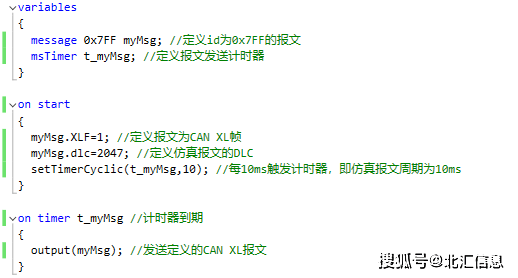
点击添加图片描述(最多60个字)进入CAPL编辑器界面,配置仿真报文(注意数据场长度使用DLC来配置,用DataLength设置实际不会生效):
场景:以周期10ms发送id为0x1、数据场为2048个字节的CAN XL报文(由于CAN XL数据段实际Byte数 = “二进制编码值”+1,所以此处设置的DLC=2047)
(4) Bus off恢复时间测试
SIC模式下ECU存在错误状态,我们可以基于CAPL函数进行干扰测试:
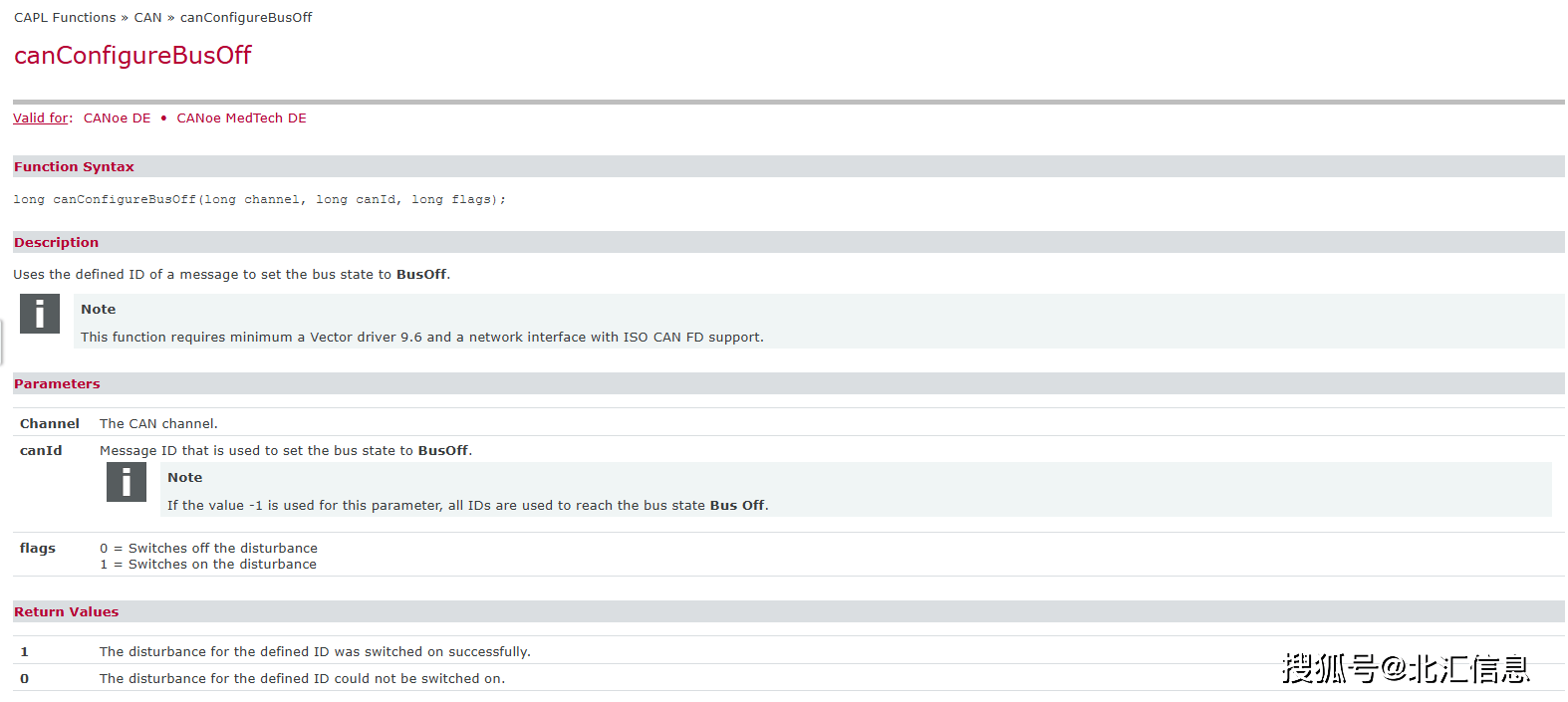 干扰函数示例
干扰函数示例
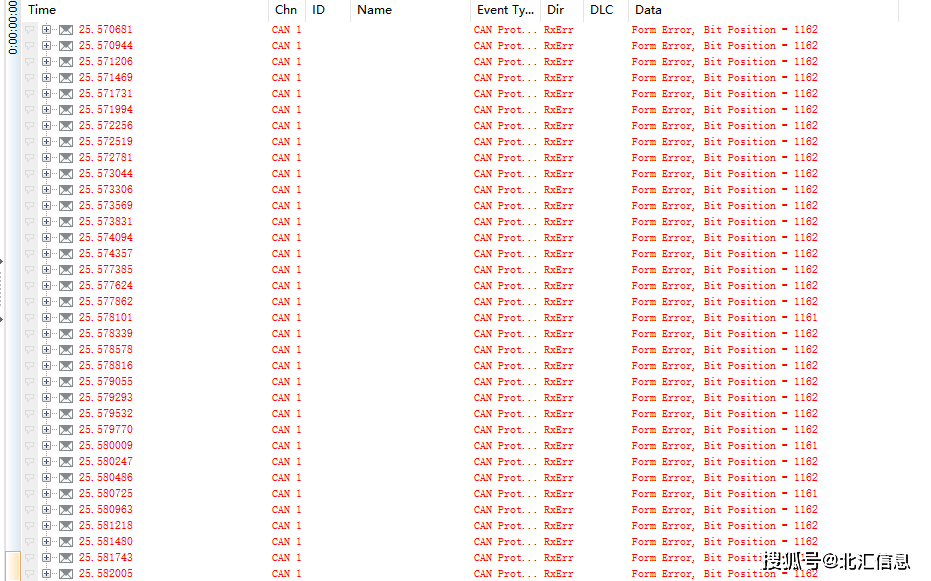 干扰示例
干扰示例三、FAST模式
1. 模式介绍
该模式采用 PWM(脉冲宽度调制)编码,通过不同的脉冲宽度表示 level_0 和 level_1,以实现高速数据传输。主要在数据域使用,当CAN XL在实际应用中速率要求较高时(>8Mbit/s),选择此驱动方式。使用此方式可以实现数据的快速传输,但与CAN/CAN FD编码方式不同。
2.测试前配置
(1) 测试软件版本:CANoe19
(2) 样件信息:速率为仲裁域500K,CAN XL数据域16M;仲裁域采用SIC模式,数据域采用FAST模式
(3) Mode选择CAN XL
(4) 基于被测件设置速率
(5) 基于被测件设置采样点(在Data phase中Phase Type默认为FD,需要手动切换为XL后设置)
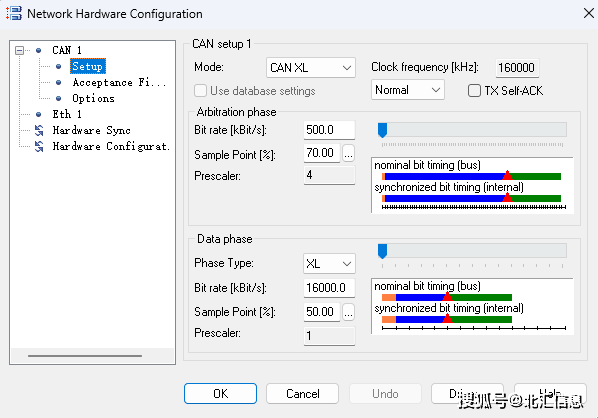
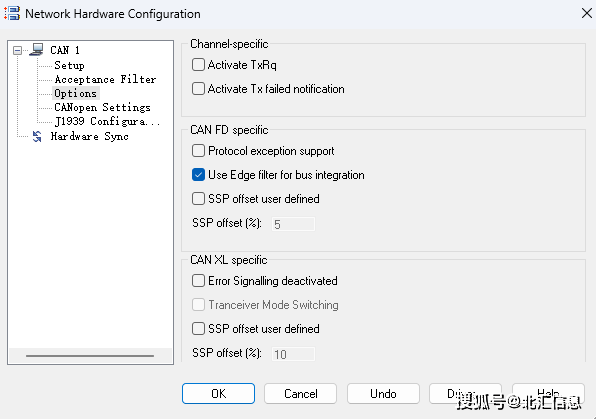
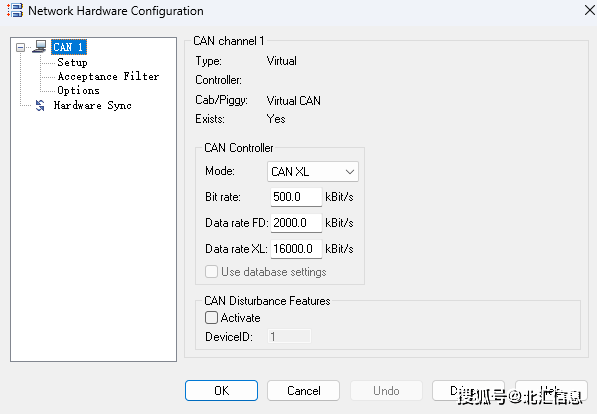
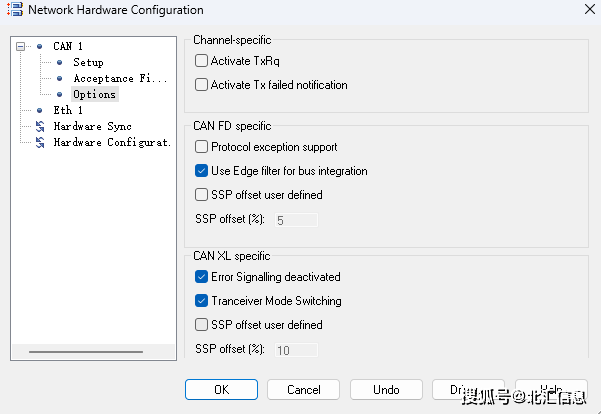
(6) 需要开启错误信号禁用(Error Signalling deactivated)后,才可以切换至FAST模式,必须按下图配置,否则无法正常通信
3.测试执行
(1) 总线输出电平
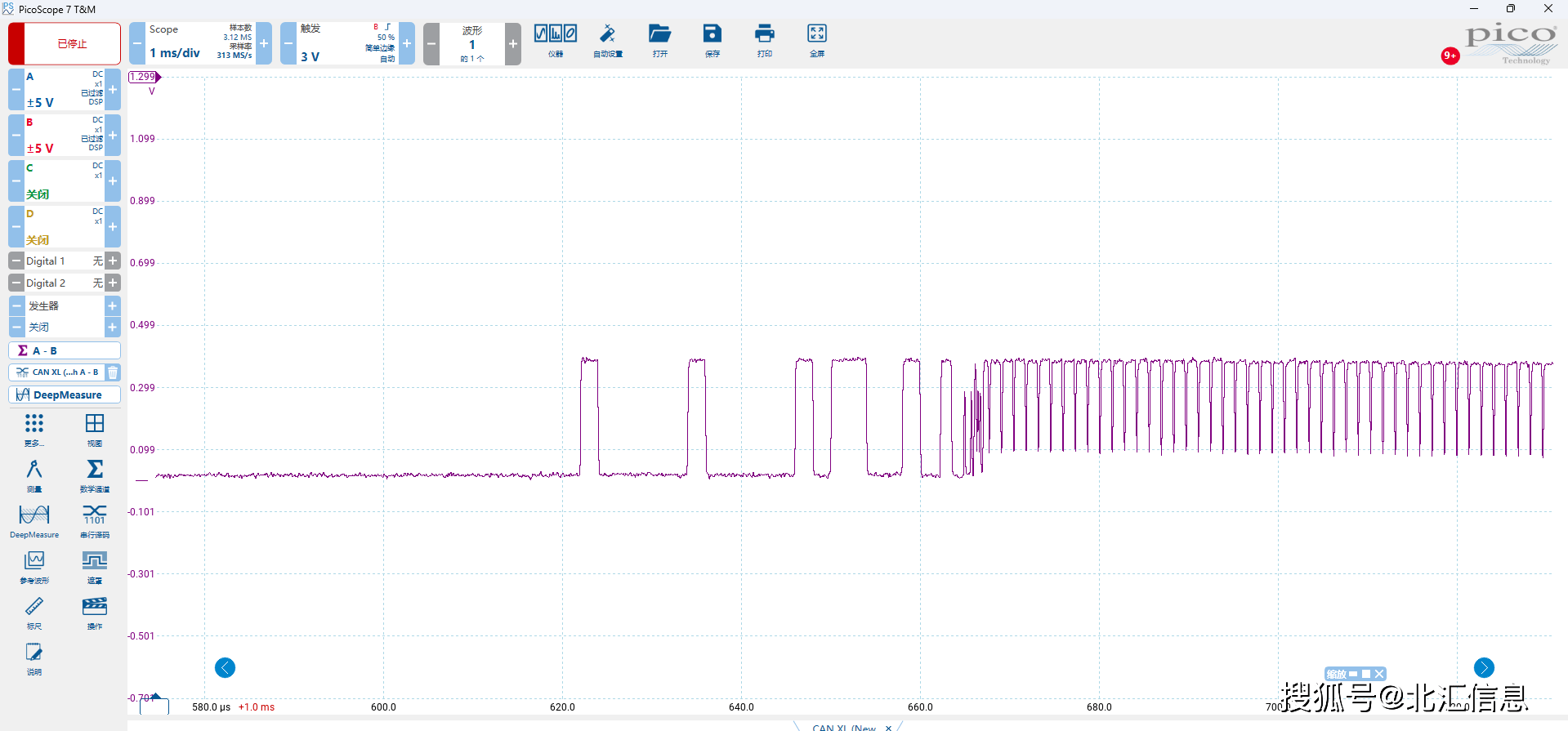
为了满足高速率的要求,数据域总线输出电平会偏低。下图为抓取的CAN XL报文,可以看到从仲裁域向数据域有个明显的电平下降(模式切换过程)
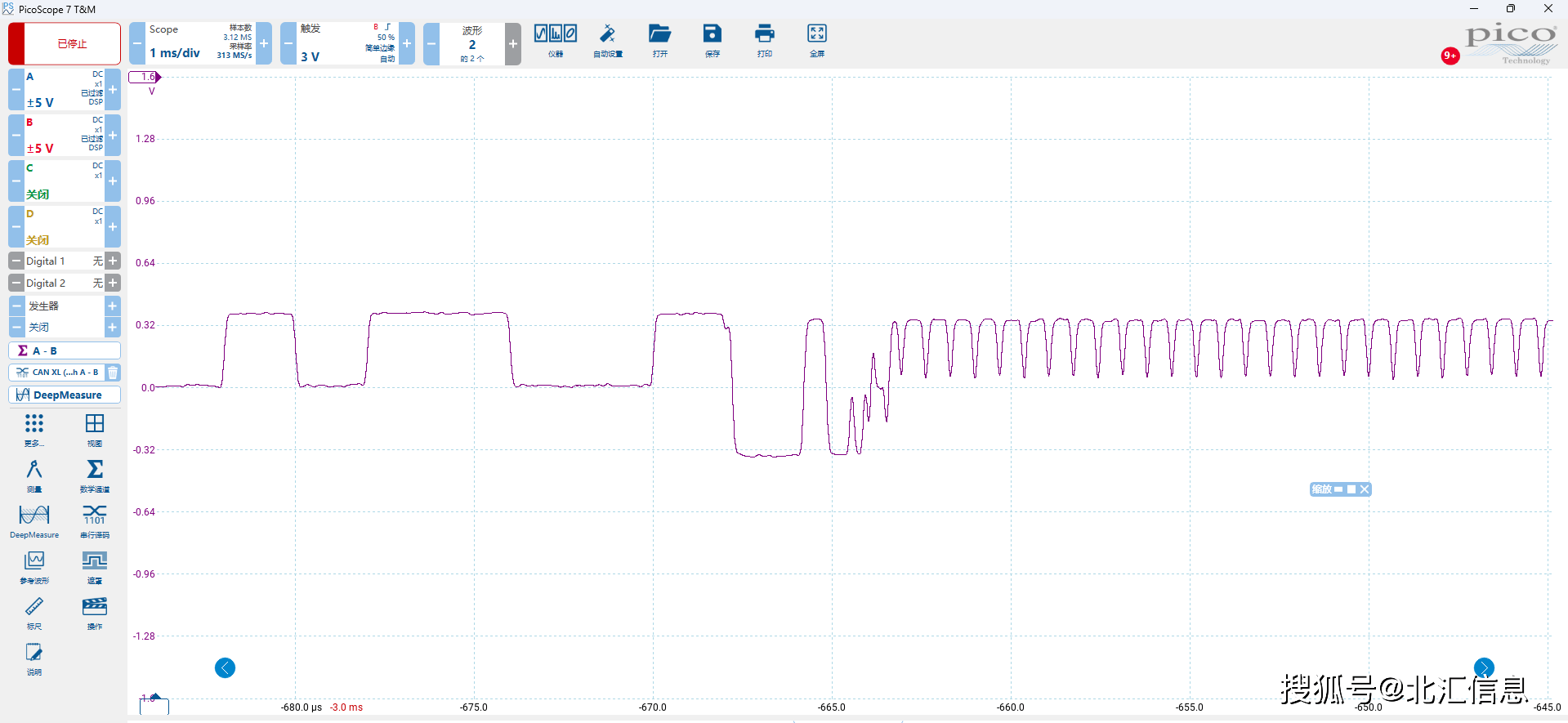 FAST模式报文示例
FAST模式报文示例
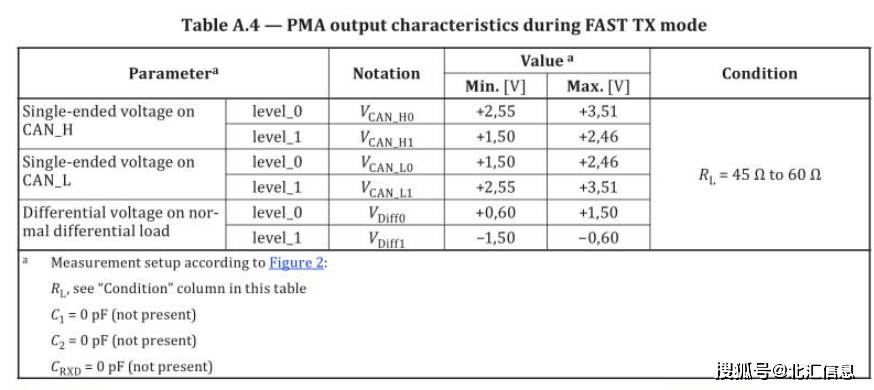 ISO11898-2 FAST模式输出电平要求
ISO11898-2 FAST模式输出电平要求(2) 振铃测试:FAST模式采用对称的推挽驱动方式,可以有效抑制振铃,所以FAST模式不进行振铃测试
(3) 仿真报文相关测试:同SIC模式操作步骤
(4) Bus off恢复时间测试:由于在FAST模式下,控制器均禁用错误信号,控制器不会对总线进行错误检查(即不存在bus off状态),所以FAST模式不进行Bus off相关测试
四、总结
以上介绍了基于CANoe实现CAN XL通信的部分典型测试及FAST模式下不适用的测试场景。虽然CAN XL与CAN/CAN FD在帧格式、编码方式(FAST模式)有所不同,且在实际测试中从环境搭建到测试执行配置较于CAN/CAN FD也存在差异,但我们仍能依靠CANoe配合PicoScope完成测试。
在汽车电子测试这一专业领域,北汇信息始终是值得信赖的先行者。面对CAN XL这一新兴的总线技术标准,公司已率先完成技术布局,不仅推出CAN XL测试方案,更构建了详实、可复用的测试用例集,旨在帮助主机厂及零部件供应商快速攻克CAN XL应用中的测试难关,加速产品开发进程,欢迎大家垂询。
注:文中部分图片来源于ISO11898-2、Vector
为了填补CAN网络与车载以太网之间带宽空白和满足现代汽车功能大容量数据传输需求,第三代CAN技术CAN XL诞生。它不仅有着高于CAN FD的速率(最高可达20Mbit/s),还能向下兼容CAN/CAN FD,在速度、成本和复杂性之间取得了良好平衡。
新技术的实际应用,离不开测试验证。那CAN XL测试与CAN/CAN FD测试之间的特殊点是什么,测试手法是否有差异,成为了我们测试最关心的部分。本文基于CAN XL的两种驱动模式(SIC/FAST),以测试实践的视角切入,对CAN XL通信测试做一个简单总结。
本文来自博客园,作者:{北汇信息},转载请注明原文链接:{https://www.cnblogs.com/polelink/}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号