第三次作业:卷积神经网络 part3
# 一、代码练习
1.定义HybridSN

三维卷积部分:
-
conv1:(1, 30, 25, 25), 8个7x3x3 的卷积核 ==>(8, 24, 23, 23)
-
conv2:(8, 24, 23, 23), 16个 5x3x3 的卷积核 ==>(16, 20, 21, 21)
-
conv3:(16, 20, 21, 21),32个 3x3x3 的卷积核 ==>(32, 18, 19, 19)
接下来要进行二维卷积,因此把前面的 32*18 reshape 一下,得到 (576, 19, 19)
二维卷积:(576, 19, 19) 64个 3x3 的卷积核,得到 (64, 17, 17)
接下来是一个 flatten 操作,变为 18496 维的向量,
接下来依次为256,128节点的全连接层,都使用比例为0.4的 Dropout,
最后输出为 16 个节点,是最终的分类类别数。
代码如下:
class HybridSN(nn.Module):
def __init__(self):
super(HybridSN, self).__init__()
self.conv1 = nn.Conv3d(1,8,(7,3,3))
self.conv2 = nn.Conv3d(8,16,(5,3,3))
self.conv3 = nn.Conv3d(16,32,(3,3,3))
self.conv2d = nn.Conv2d(576,64,(3,3))
self.fc1 = nn.Linear(18496,256)
self.fc2 = nn.Linear(256,128)
self.out = nn.Linear(128, class_num)
self.dropout = nn.Dropout(p=0.4)
def forward(self,x):
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = F.relu(self.conv3(x))
x = x.view(-1,x.shape[1]*x.shape[2],x.shape[3],x.shape[4])
x = F.relu(self.conv2d(x))
x = x.view(x.size(0),-1)
x = self.fc1(x)
x = self.dropout(x)
x = self.fc2(x)
x = self.dropout(x)
x = self.out(x)
return x
运行结果如下:
第一次运行:
accuracy 0.9498 9225
第二次运行:
accuracy 0.9786 9225
第三次运行:
accuracy 0.9560 9225
可以看到精确度浮动较大,说明网络并没有训练好,可能是因为训练数据过少导致的。
2. 基于学习率衰减的优化
将学习率设置为0.0001,并随着训练次数增加减少学习率
代码如下:
net = HybridSN().to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.0001)
def adjust_learning_rate(optimizer, lr):
for param_group in optimizer.param_groups:
param_group['lr'] = lr
# 开始训练
total_loss = 0
net.train()
for epoch in range(100):
lr = 0.0001
if epoch > 40:
lr = 0.00001
if epoch > 75:
lr = 0.000001
adjust_learning_rate(optimizer, lr)
for i, (inputs, labels) in enumerate(train_loader):
inputs = inputs.to(device)
labels = labels.to(device)
# 优化器梯度归零
optimizer.zero_grad()
# 正向传播 + 反向传播 + 优化
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
total_loss += loss.item()
第一次运行结果:
accuracy 0.9780 9225
第二次运行结果:
accuracy 0.9778 9225
第三次运行结果:
accuracy 0.9808 9225
第四次运行结果:
accuracy 0.9802 9225
第五次运行结果:
accuracy 0.9797 9225
可以看到精确度稳定在98%左右。
3. SENet实现

SE模块首先对卷积得到的特征图进行Squeeze操作,得到channel级的全局特征,然后对全局特征进行Excitation操作,学习各个channel间的关系,也得到不同channel的权重,最后乘以原来的特征图得到最终特征。本质上,SE模块是在channel维度上做attention或者gating操作,这种注意力机制让模型可以更加关注信息量最大的channel特征,而抑制那些不重要的channel特征。
代码如下:
class SELayer(nn.Module):
def __init__(self,channel,reduction=16):
super(SELayer,self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(channel,channel//reduction,bias=False),
nn.ReLU(inplace=True),
nn.Linear(channel//reduction,channel,bias=False),
nn.Sigmoid()
)
def forward(self,x):
b,c,_,_ = x.size()
y = self.avg_pool(x).view(b,c)
y = self.fc(y).view(b,c,1,1)
return x*y.expand_as(x)
class HybridSN(nn.Module):
def __init__(self,reduction=16):
super(HybridSN, self).__init__()
self.conv1 = nn.Conv3d(1,8,(7,3,3))
self.conv2 = nn.Conv3d(8,16,(5,3,3))
self.conv3 = nn.Conv3d(16,32,(3,3,3))
self.conv2d = nn.Conv2d(576,64,(3,3))
self.se = SELayer(64,reduction)
self.fc1 = nn.Linear(18496,256)
self.fc2 = nn.Linear(256,128)
self.out = nn.Linear(128, class_num)
self.dropout = nn.Dropout(p=0.4)
def forward(self,x):
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = F.relu(self.conv3(x))
x = x.view(-1,x.shape[1]*x.shape[2],x.shape[3],x.shape[4])
x = F.relu(self.conv2d(x))
x = self.se(x)
x = x.view(x.size(0),-1)
x = self.fc1(x)
x = self.dropout(x)
x = self.fc2(x)
x = self.dropout(x)
x = self.out(x)
return x
经过多次训练后,精确度基本维持在98%上下,相比于没有加SE模块的网络更加稳定,且精度有所上升。
SENet提升分类效果的原理:SENet通过对通道进行加权,强调有效信息,抑制无效信息,相当于对原始信息做了一次分类,从而使网络更加关注有效信息,减少对无效信息的关注,在训练样本较少的情况下能有效提高学习效果和学习效率。
二、视频学习
1. 语义分割中的自注意力机制与低秩重建
语义分割:对图像每个像素进行分类并同时输出多个像素。
自注意力机制:注意力机制模仿了生物观察行为的内部过程,即一种将内部经验和外部感觉对其从而增加部分区域的观察精细度的机制。注意力机制可以快速提取稀疏数据的重要特征,因而被广泛用于自然语言处理任务。而自注意力机制是注意力机制的改进,其减少了对外部信息的依赖,更擅长捕捉数据或特征的内部相关性。
在图像语义分割中,对物体的识别需要上下文联系,因此需要获取像素的内部相关性。而自注意力机制很好的满足了这一需求。
Attention机制继在NLP领域取得主导地位后,近两年在CV领域也取得了重要应用。率先将其引入的是Nonlocal。仅2018年,在语义分割领域就有多篇高影响力文章出炉,如 PSANet,DANet,OCNet,CCNet,以及今年的Local Relation Net。此外,针对 Attention 数学形式的优化,又衍生出A2Net,CGNL。而 A2Net 又开启了“低秩”重建的探索,同一时期的SGR,Beyonds Grids,GloRe,LatentGNN 都可以此归类。上述四文皆包含如下三步:1.像素到语义节点映射 2.语义节点间推理 3.节点向像素反映射。其中,step 2的意义尚未有对比实验验证,目前来看,step 1 & 3 构成的对像素特征的低秩重建发挥了关键作用。关于如何映射和反映射,又有了APCNet 和EMANet等相关工作。
2. 图像语义分割前沿进展
自适应图像语义分割技术
图像语义分割技术目前面临大小各异、形状复杂、环境多变、类别众多的挑战。
ResNet通过跳层连接增加多尺度能力
2.1 从卷积出发提高卷积神经网络多尺度能力
富尺度空间的深度神经网络通用架构
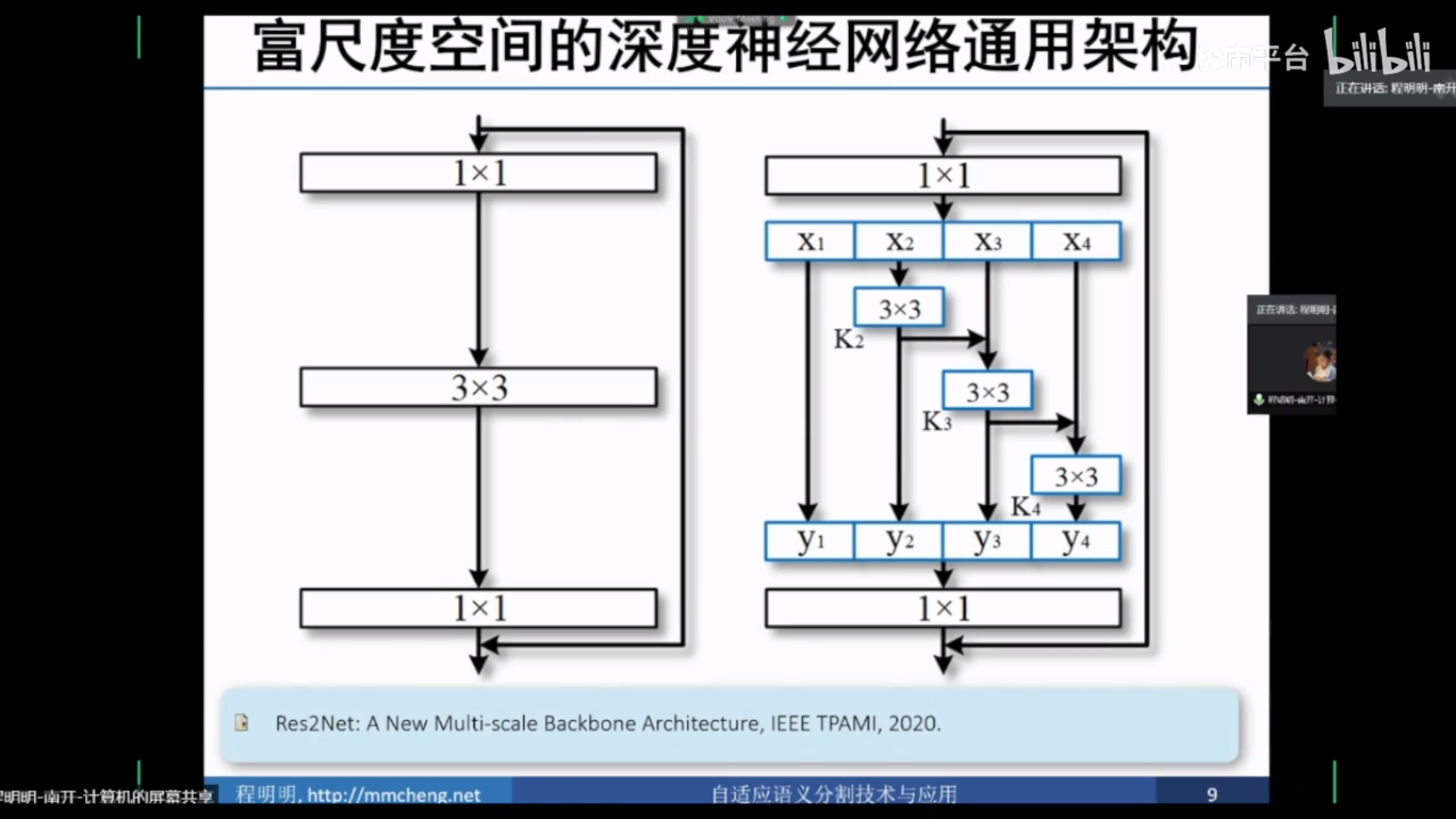
右边结构增加了层类多尺度信息提取能力,且计算量要小于通常的神经网络架构。
可以与其他类型神经网络兼容。
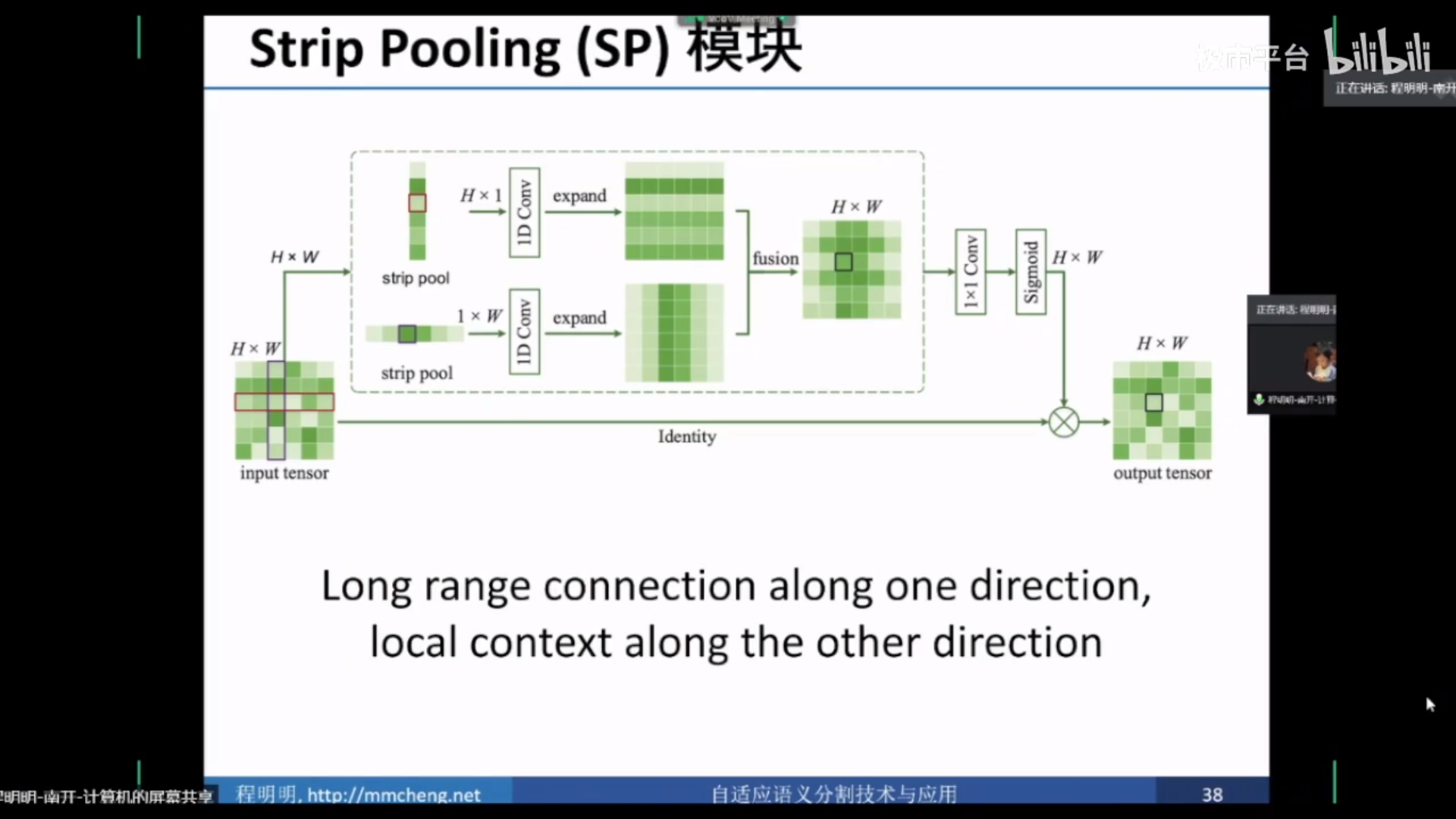
2.2 从池化出发提高卷积神经网络多尺度能力
图像语义分割既需要细节又需要全局信息。
传统神经网络对细节信息提取较好,但对全局信息来说消耗资源非常多。
带状池化:使用条形的Pooling,可以得到各向异性的信息。
Strip Pooling模块

 浙公网安备 33010602011771号
浙公网安备 33010602011771号