机器人学导论-约翰 J.克雷格
目录
第五章 雅可比:速度和静力
5.1 刚体的线速度和角速度
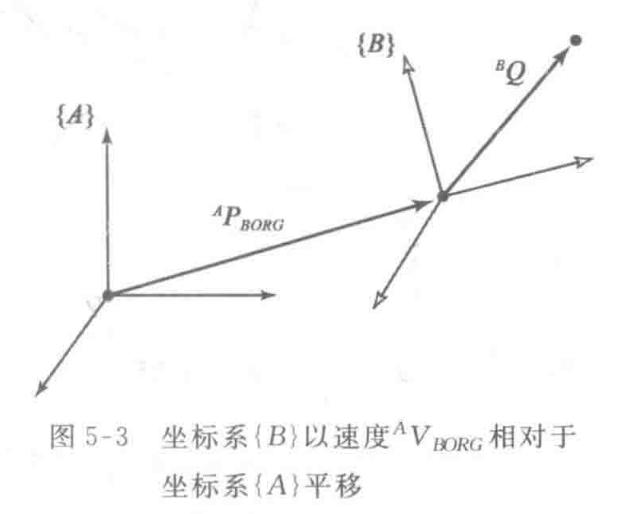
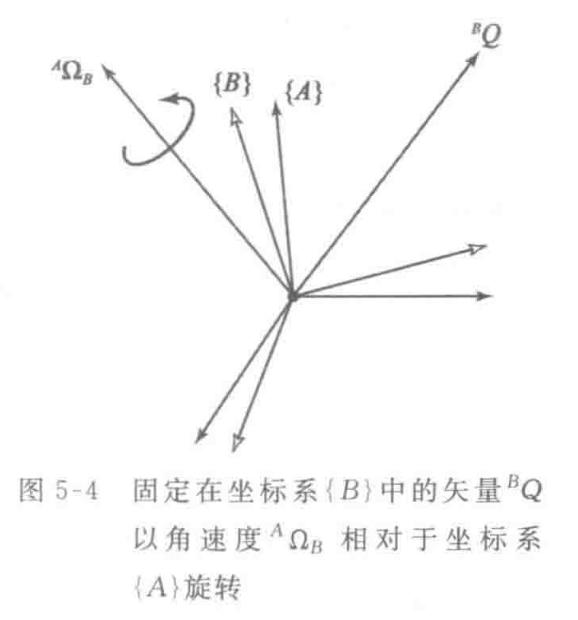

\(V_{BORG}\)是坐标系B在A坐标系下的速度,\(^BV_Q\)是B坐标系下Q的速度,\(^A\Omega\)表示从坐标系A观测时,矢量Q的运动是绕着\(^A\Omega\)旋转的
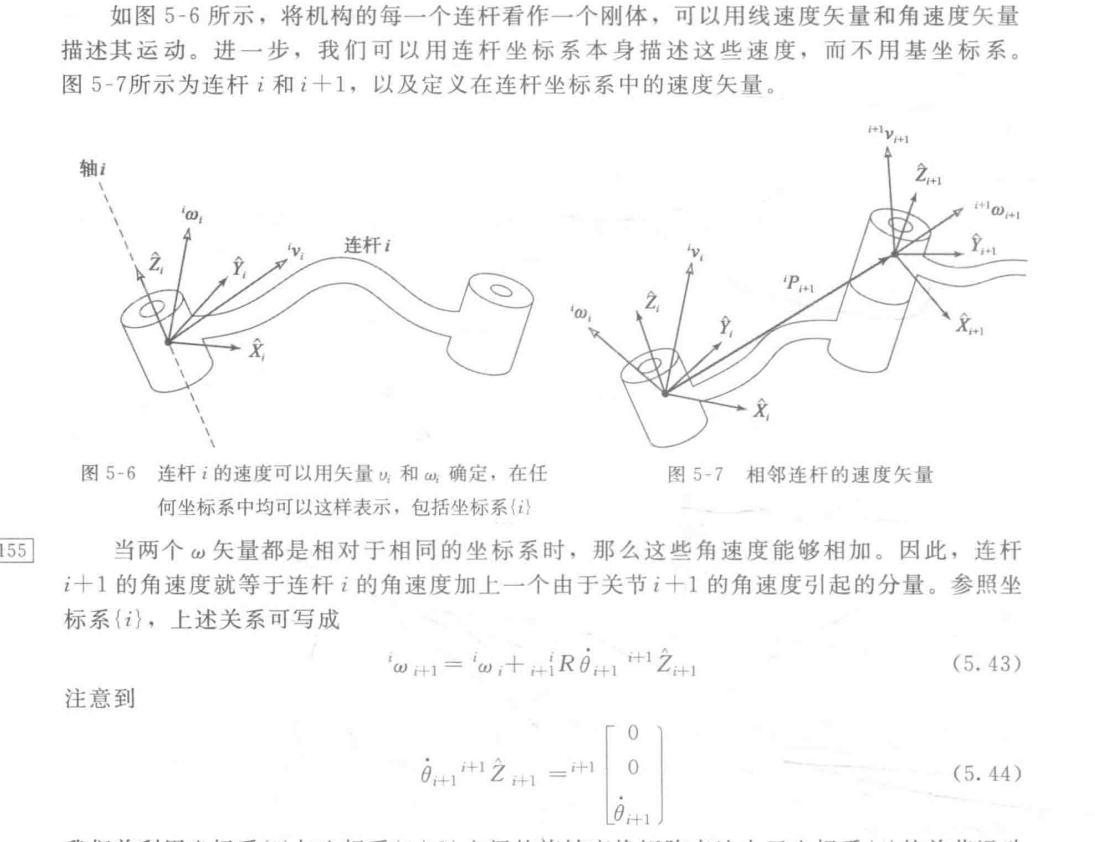
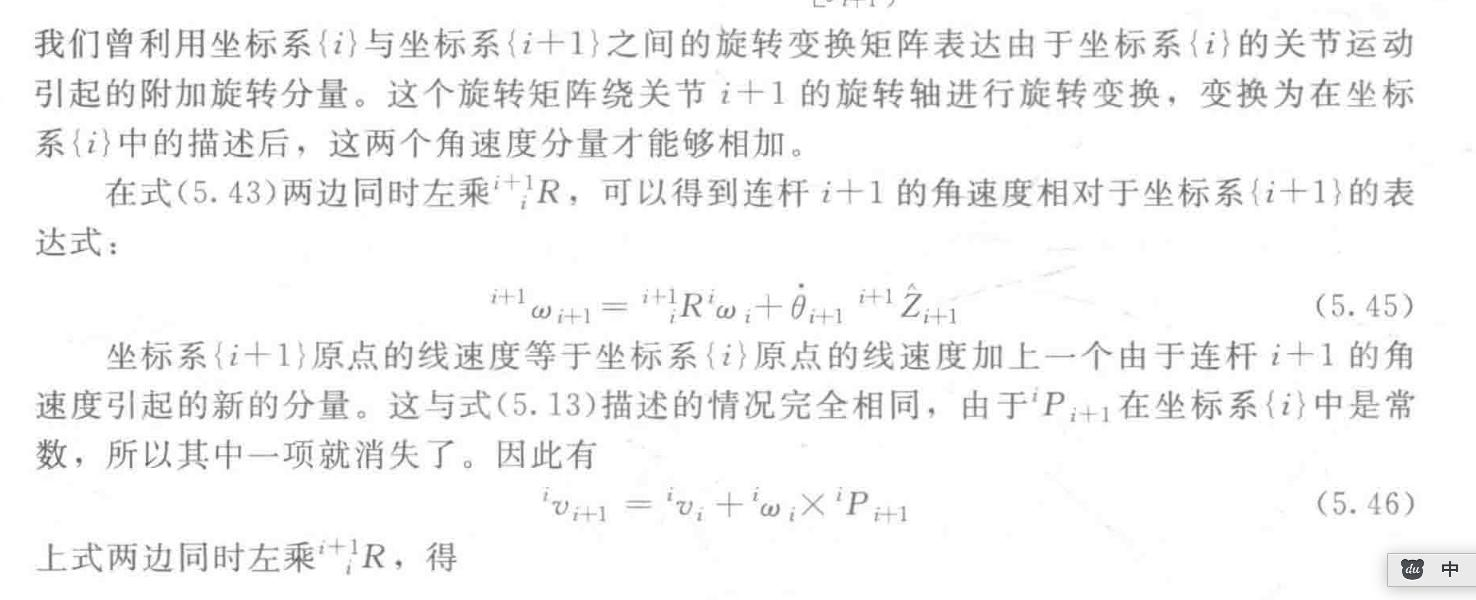
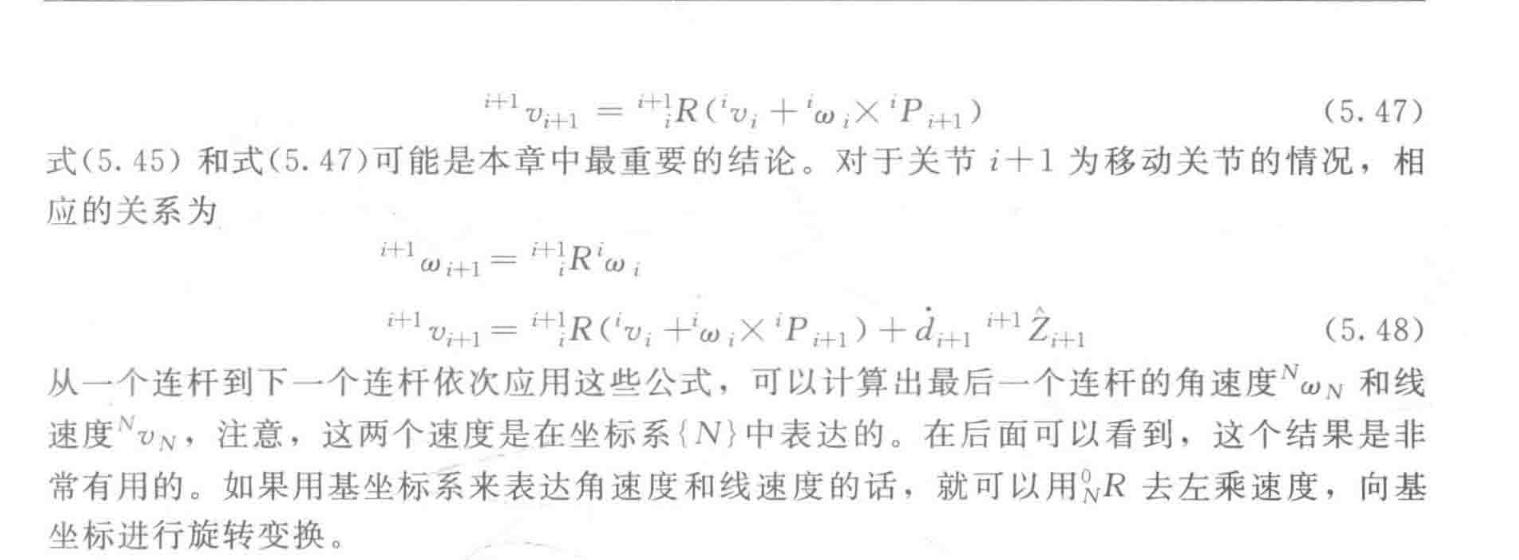
5.5 机器人连杆运动
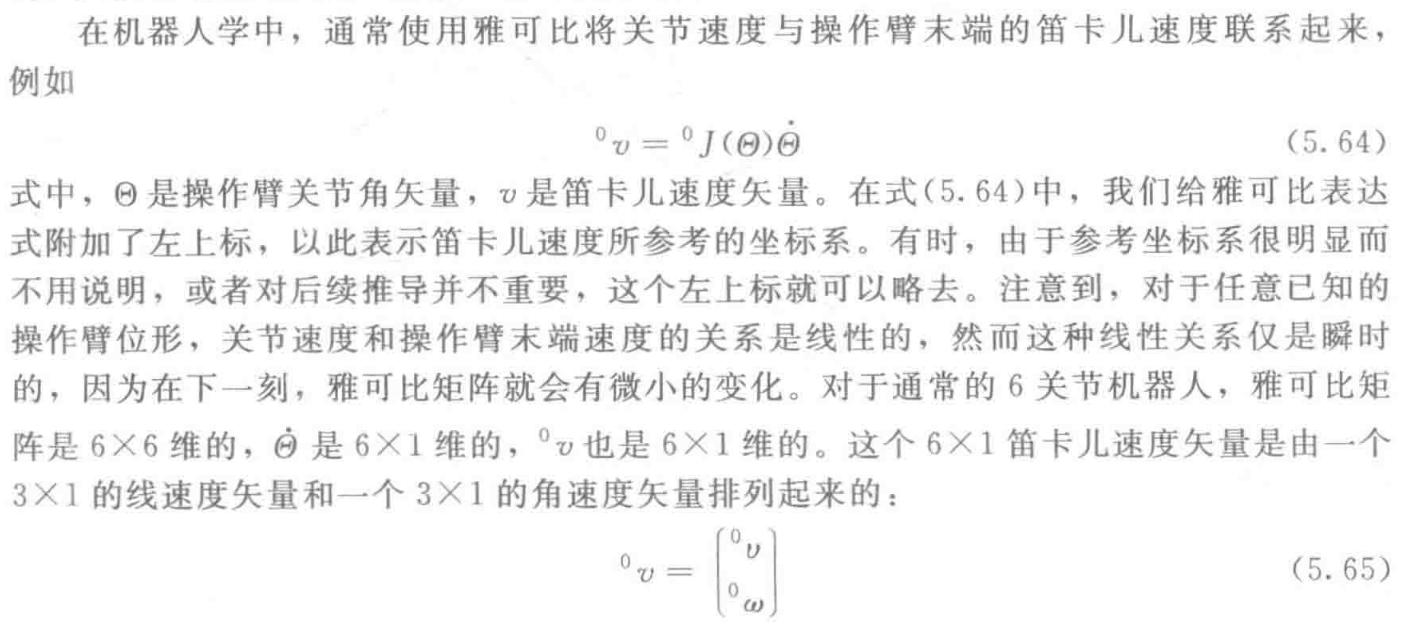
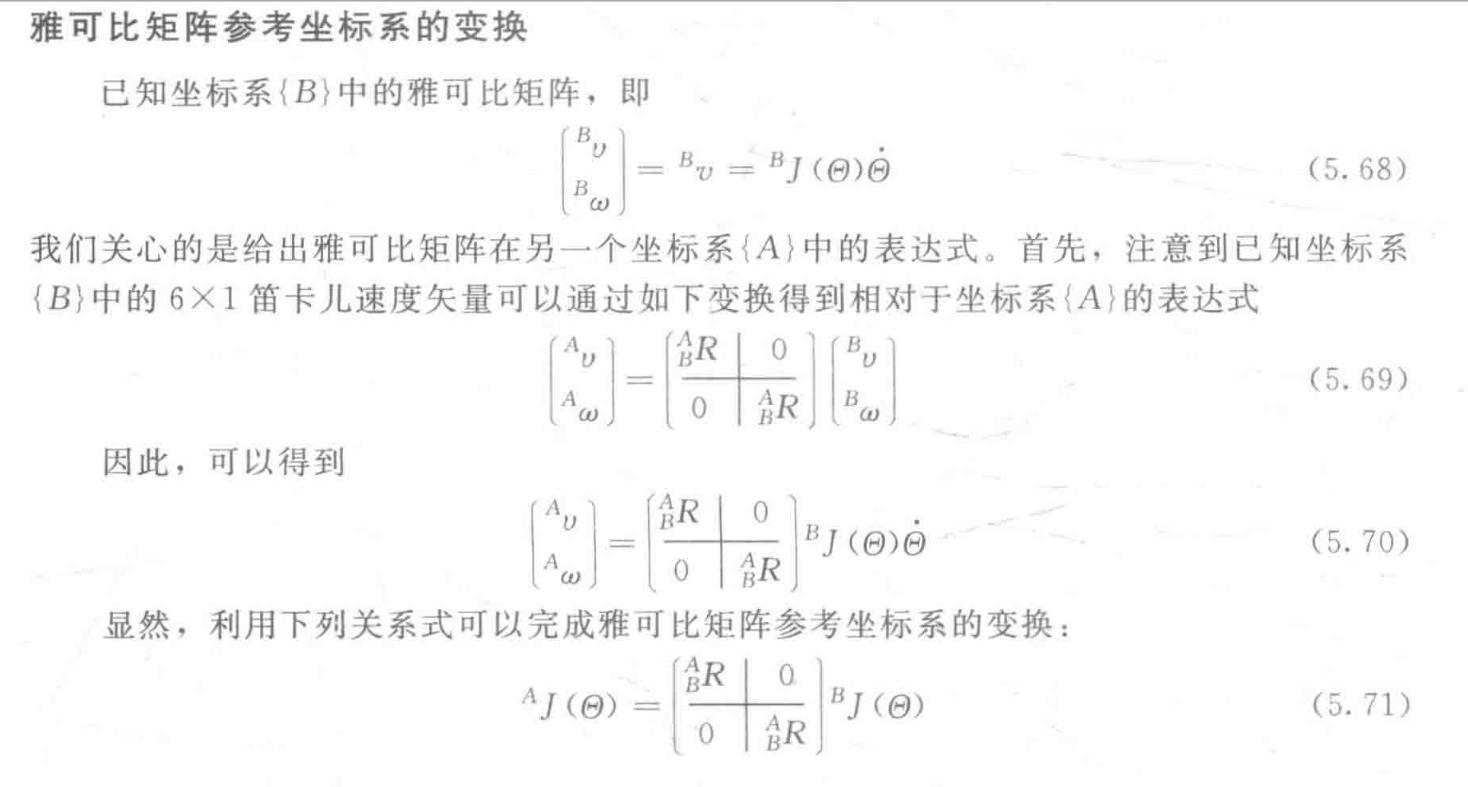
5.7 雅可比
第六章 动力学
6.1 刚体加速度:
- 线加速度:
![]()
如果\(^{B} Q\)是常量时,即:\(^{B} V_{Q} = ^{B} \dot{V}_{Q} = 0\),式(6-10)简化为:
![]()
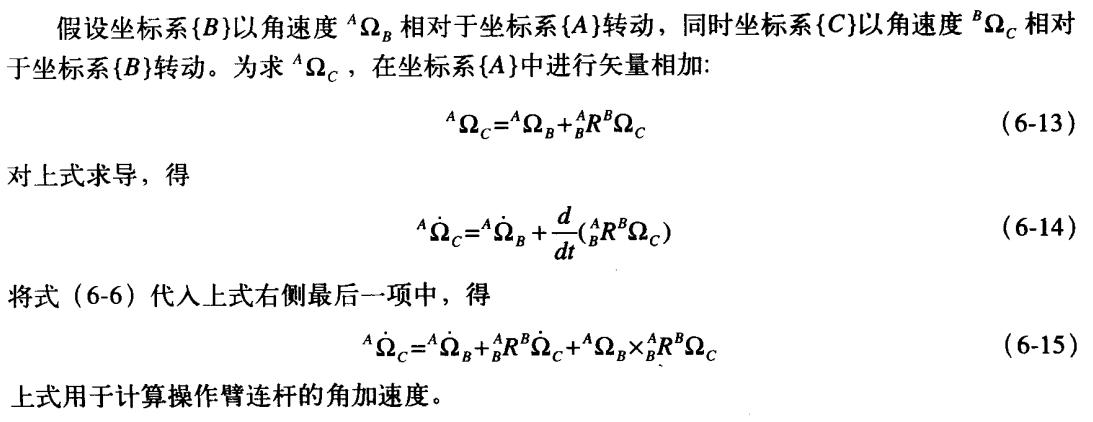
- 角加速度:
![]()


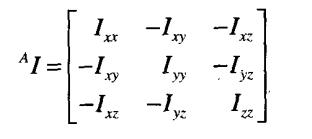
6.3 质量分布:
6.4 欧拉方程:

6.5 牛顿欧拉迭代动力学方程:
-
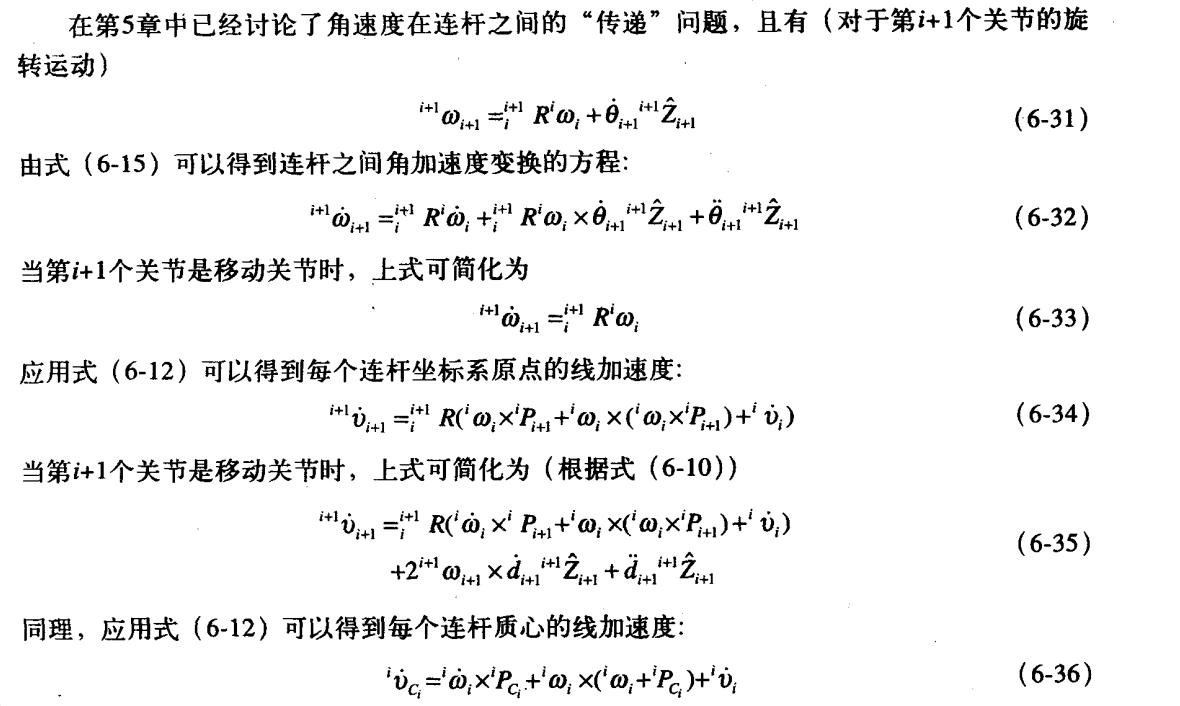
连杆之间角加速度,线加速度:
![]()
-
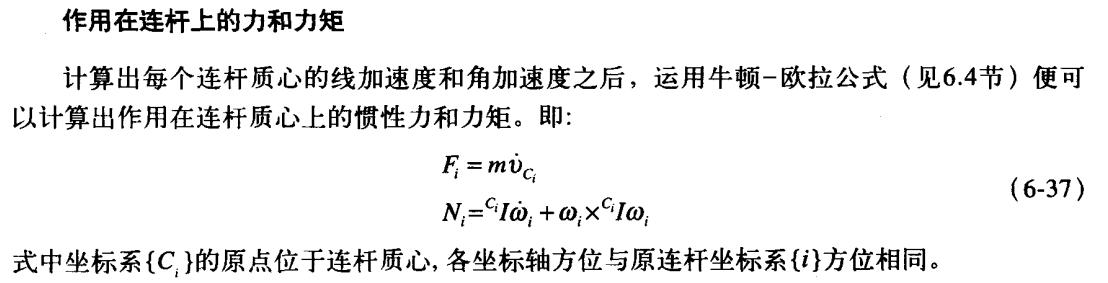
计算连杆质心的惯性力和力矩:
![]()
-
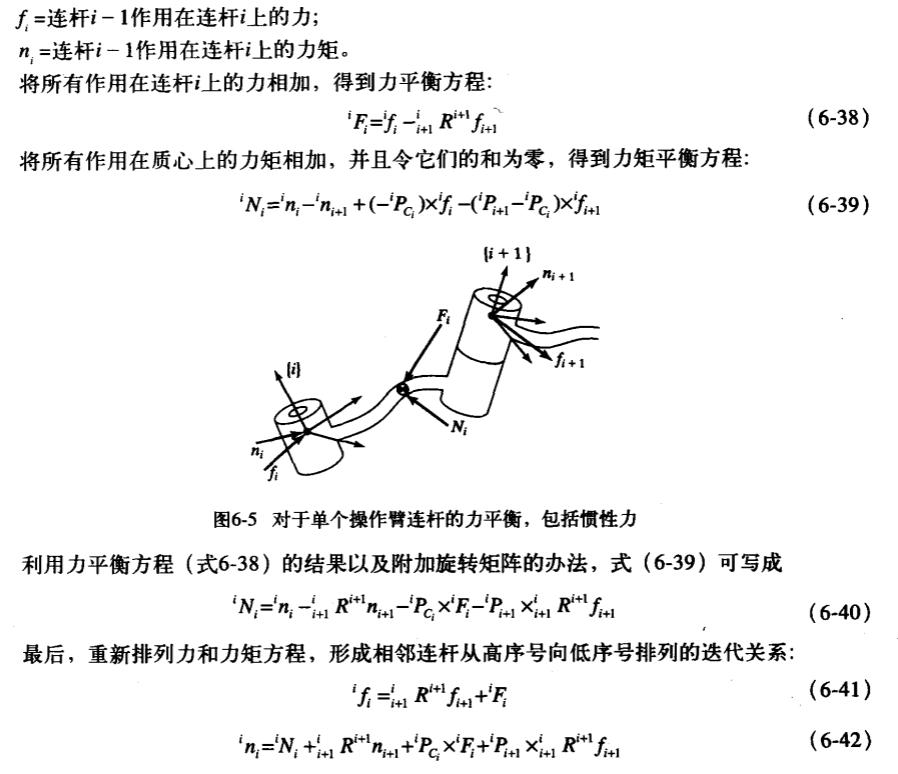
计算实际施加在连杆上的力和力矩:
![]()
![]()
-
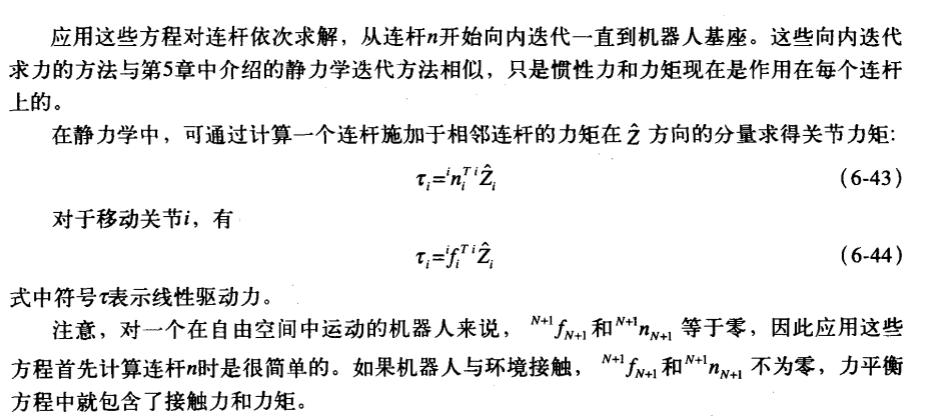
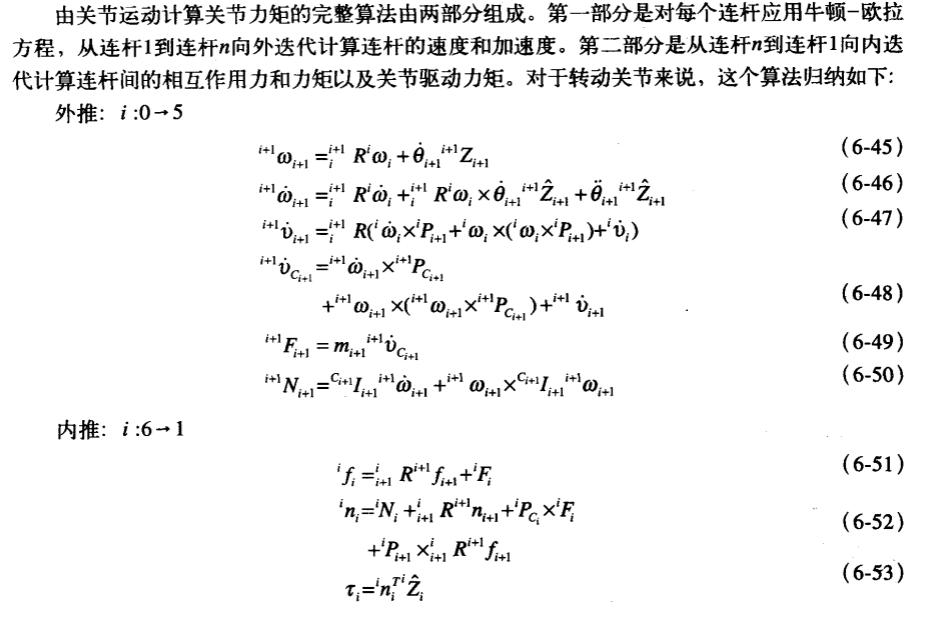
牛顿-欧拉迭代动力学算法:
![]()
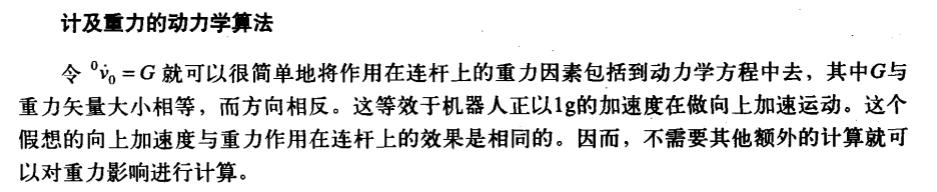
考虑重力:
![]()
6.6 考虑摩擦力的动力学方程:
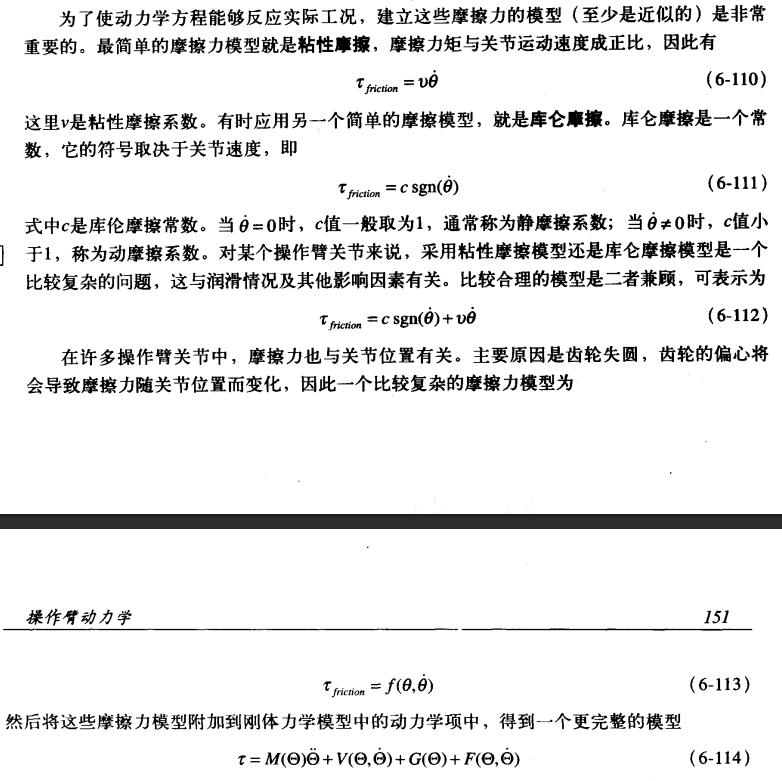
M:质量矩阵; V:离心力和哥氏力; G:重力矢量

 浙公网安备 33010602011771号
浙公网安备 33010602011771号