摘要:
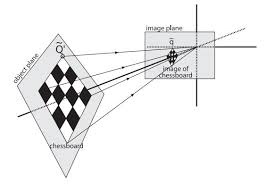
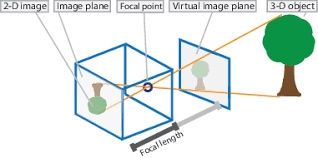
如何将图片上的像素坐标(u, v)投影到世界坐标系中, 即得到 \((x_w, y_w, z_w)\). 数学表达如下 \[\begin{align*} s\begin{bmatrix} u\\v\\1 \end{bmatrix} &= \begin{bmatrix} f_x & 0 & c_x & 阅读全文
posted @ 2024-04-20 22:11
nowgood
阅读(124)
评论(0)
推荐(0)
摘要:
用于表示同一世界在不同坐标系下的坐标值 为了方便理解, 建议先看 线性代数的本质--基变换 旋转矩阵 这里变换矩阵, 为了方便, 我们先只考虑旋转 \(R^{imu}_{global}\) 的列向量是imu坐标系的基向量在global坐标系下的坐标表示, 将imu坐标系下的坐标与R相乘, 得到同一个 阅读全文
posted @ 2024-04-20 21:26
nowgood
阅读(110)
评论(0)
推荐(0)


 浙公网安备 33010602011771号
浙公网安备 33010602011771号