Overview
本文主要讨论投影矩阵相关问题,主要涉及:
- 基本变换
- 正射投影
- 透视投影
基本变换
绕坐标轴旋转:
\[R_x=
\begin{bmatrix}
1 & 0 & 0 &0 \\
0 & cos(\alpha) & -sin(\alpha) & 0 \\
0 & sin(\alpha) & cos(\alpha) & 0 \\
0 & 0 & 0 & 1
\end{bmatrix} \qquad
R_y=
\begin{bmatrix}
cos(\alpha) & 0 & sin(\alpha) &0 \\
0 & 1 & 0 & 0 \\
-sin(\alpha) & 0 & cos(\alpha) & 0 \\
0 & 0 & 0 & 1
\end{bmatrix} \qquad
R_z=
\begin{bmatrix}
cos(\alpha) & -sin(\alpha) & 0 & 0 \\
sin(\alpha) & cos(\alpha) & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
\]
缩放:
\[S(s_x,s_y,s_z)=
\begin{bmatrix}
s_x & 0 & 0 & 0 \\
0 & s_y & 0 & 0 \\
0 & 0 & s_z & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
\]
*行移动:
\[T(t_x,t_y,t_z)=
\begin{bmatrix}
1 & 0 & 0 & t_x \\
0 & 1 & 0 & t_y \\
0 & 0 & 1 & t_z \\
0 & 0 & 0 & 1
\end{bmatrix}
\]
正射投影
正射投影是将长方体\([l,r] \times [b,t] \times [f,n]\) 映射为NDC标准立方体$[-1,1] \times [-1,1] \times [-1,1] $ 先将长方体中心*移到原点,然后缩放,得到投影矩阵
\[{\Large
M_{ortho}=
\begin{bmatrix}
\frac{2}{r-l} & 0 & 0 & 0 \\
0 & \frac{2}{t-b} & 0 & 0 \\
0 & 0 & \frac{2}{n-f} & 0 \\
0 & 0 & 0 & 1
\end{bmatrix} \cdot \begin{bmatrix}
1 & 0 & 0 & -\frac{r+l}{2} \\
0 & 1 & 0 & -\frac{t+b}{2} \\
0 & 0 & 1 & -\frac{n+f}{2} \\
0 & 0 & 0 & 1
\end{bmatrix}
}
\]
透视投影
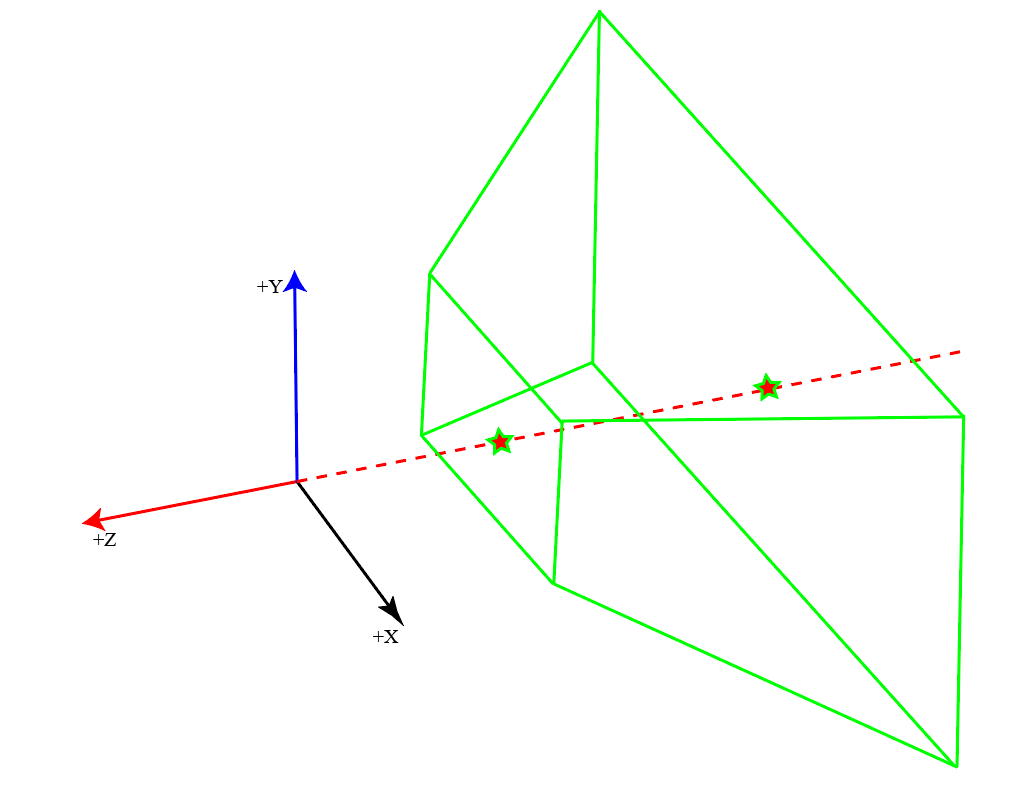
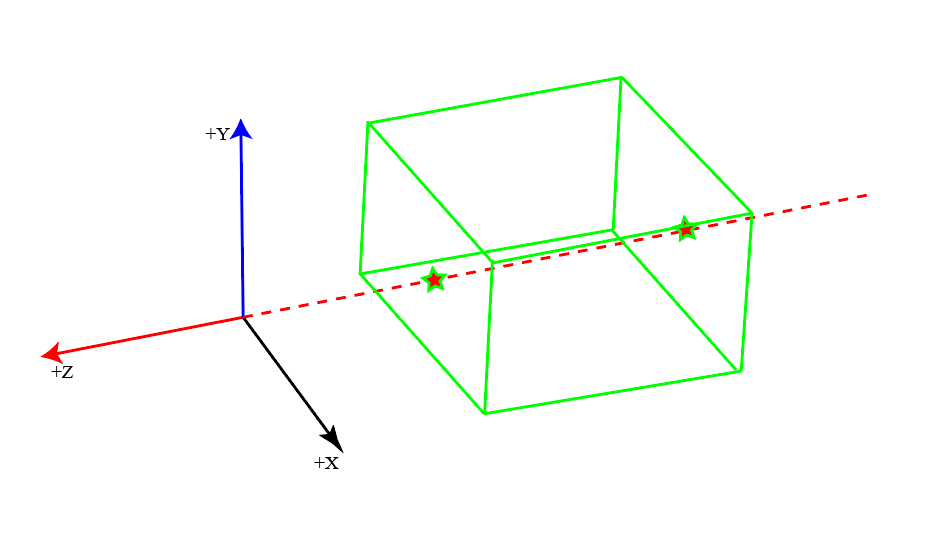
正射投影是将视椎体\([l,r] \times [b,t] \times [f,n]\) 映射为NDC标准立方体$[-1,1] \times [-1,1] \times [-1,1] $ ,先将视椎体压缩为长方体,如下左图变换为右图,然后根据乘以正射投影矩阵,即可得到NDC标准立方体。
注意:视椎体顶点为原点,关于XOZ和YOZ*面轴对称
![]()
![]()
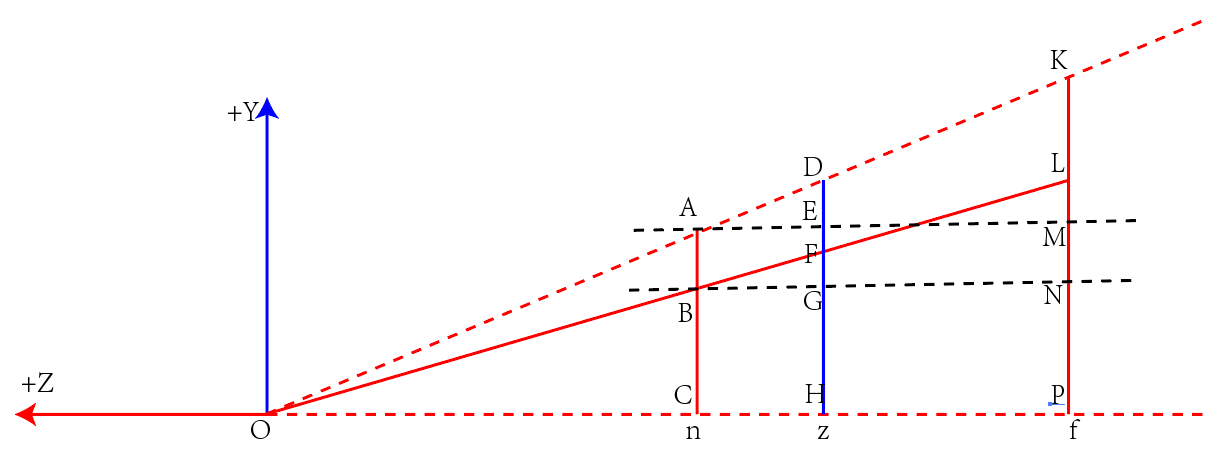
下面讨论将视椎体压缩为长方体,在YOZ*面中,梯形ACPK被压缩为长方形ACPM,如下图所示。
![]()
椎体中AK被压缩为长方体中AM. 默认成比例线性压缩(此处不清楚具体原因),则对于椎体KP上任意一点L,求解其被压缩后的点R,则有
\[{\large \frac{PR}{PL}=\frac{MP}{KP}=\frac{AC}{KP}=\frac{n}{f}=\frac{BC}{PL}=\frac{PN}{PL}}
\]
所以压缩后的点R与N点重合,故直线BL压缩为直线BN.
对直线BL上任意坐标点\(F(z_f,y_f)\),压缩后的点必然位于BN上,即任意点\(F\)的纵坐标\(y_f\)压缩为\(y_b\),根据几何相似可得:
\[y_b=\frac{y_f}{z_f} \cdot n
\]
同理映射x方向,则映射关系为:
\[\begin{bmatrix}
x_f \\
y_f \\
z_f \\
1\\
\end{bmatrix} ->
\begin{bmatrix}
\frac{x_f}{z_f} \cdot n \\
\frac{y_f}{z_f} \cdot n \\
unknown \\
1\\
\end{bmatrix} ->
\begin{bmatrix}
n \cdot x_f\\
n \cdot y_f \\
unknown \\
z_f\\
\end{bmatrix}
\]
压缩矩阵为:
\[ proj=
\begin{bmatrix}
n & 0 & 0 & 0 \\
0 & n & 0 & o \\
A_x & B_x & C_x & D_x \\
0 & 0 & 1 & 0
\end{bmatrix}
\]
下面求解第三行的未知数,可以根据以下两个条件求得:
- **面的坐标点在压缩后不变
- 远*面的坐标点z方向在压缩后不变
对于条件1,*处*面任一点\(proj \cdot (x,y,n,1)^T=(nx,ny,n^2,n)^T\) ,对任意\((x,y)\)有以下方程成立
\[A_x \cdot x+ B_x \cdot y + C_x \cdot n +D_x \cdot 1 =n^2
\]
可得\(A_x=B_x=0 \quad C_x \cdot n +D_x=n^2\)
注意:对于齐次坐标\((x,y,n,1)^T、(nx,ny,n^2,n)\) 为同一个点
对于条件2:远*面任意一点\(proj \cdot (x,y,f,1)^T=(fx,fy,f^2,f)^T\),则有:
\[C_x \cdot f +D_x \cdot 1 =f^2
\]
联立条件1,可得:
\(C_x=n+f \qquad D_x=-nf\)
综上所述压缩矩阵为:
压缩矩阵为:
\[ proj=
\begin{bmatrix}
n & 0 & 0 & 0 \\
0 & n & 0 & 0 \\
0 & 0 & n+f & -nf \\
0 & 0 & 1 & 0
\end{bmatrix}
\]
透视投影矩阵为
\[{\large
\begin{align*}
\begin{split}
M_{proj}&=M_{ortho} \cdot proj=
\begin{bmatrix}
\frac{2}{r-l} & 0 & 0 & 0 \\
0 & \frac{2}{t-b} & 0 & 0 \\
0 & 0 & \frac{2}{n-f} & 0 \\
0 & 0 & 0 & 1
\end{bmatrix} \cdot \begin{bmatrix}
1 & 0 & 0 & -\frac{r+l}{2} \\
0 & 1 & 0 & -\frac{t+b}{2} \\
0 & 0 & 1 & -\frac{n+f}{2} \\
0 & 0 & 0 & 1
\end{bmatrix} \cdot
\begin{bmatrix}
n & 0 & 0 & 0 \\
0 & n & 0 & 0 \\
0 & 0 & n+f & -nf \\
0 & 0 & 1 & 0
\end{bmatrix} \\
&=\begin{bmatrix}
\frac{2n}{r-l} & 0 & -\frac{r+l}{r-l} & 0 \\
0 & \frac{2n}{t-b} & -\frac{t+b}{t-b} & 0 \\
0 & 0 & \frac{n+f}{n-f} & -\frac{2nf}{n-f} \\
0 & 0 & 1 & 0
\end{bmatrix}
\end{split}
\end{align*}
}
\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号