[Lidar] --- Livox Mid-360激光雷达&&FastLio2测试记录
起兴
莫听穿林打叶声,何妨吟啸且徐行。竹杖芒鞋轻胜马,谁怕?一蓑烟雨任平生。
2025-11-21 15:44:53 星期五
写在前面
这篇博客方便知识点的记录和日后的学而时习之。笔者梦到哪里写到哪里,如有不对之处,请读者纠正见谅。
正文
先贴一个官网文档:https://www.livoxtech.com/downloads。 不清楚的直接翻翻文档,不要蒙头查CSDN。
很多教程都非常详尽了,这里不再赘述,这里着重记录问题
https://blog.csdn.net/Hahalim/article/details/129414327
https://zhuanlan.zhihu.com/p/694345785
推荐电压12V。
1- Livox viewer2直连
因为激光雷达的数据直接传给电脑,所以只需要配置好IP地址即可。这里设计ROS2的colcon部分。

效果:
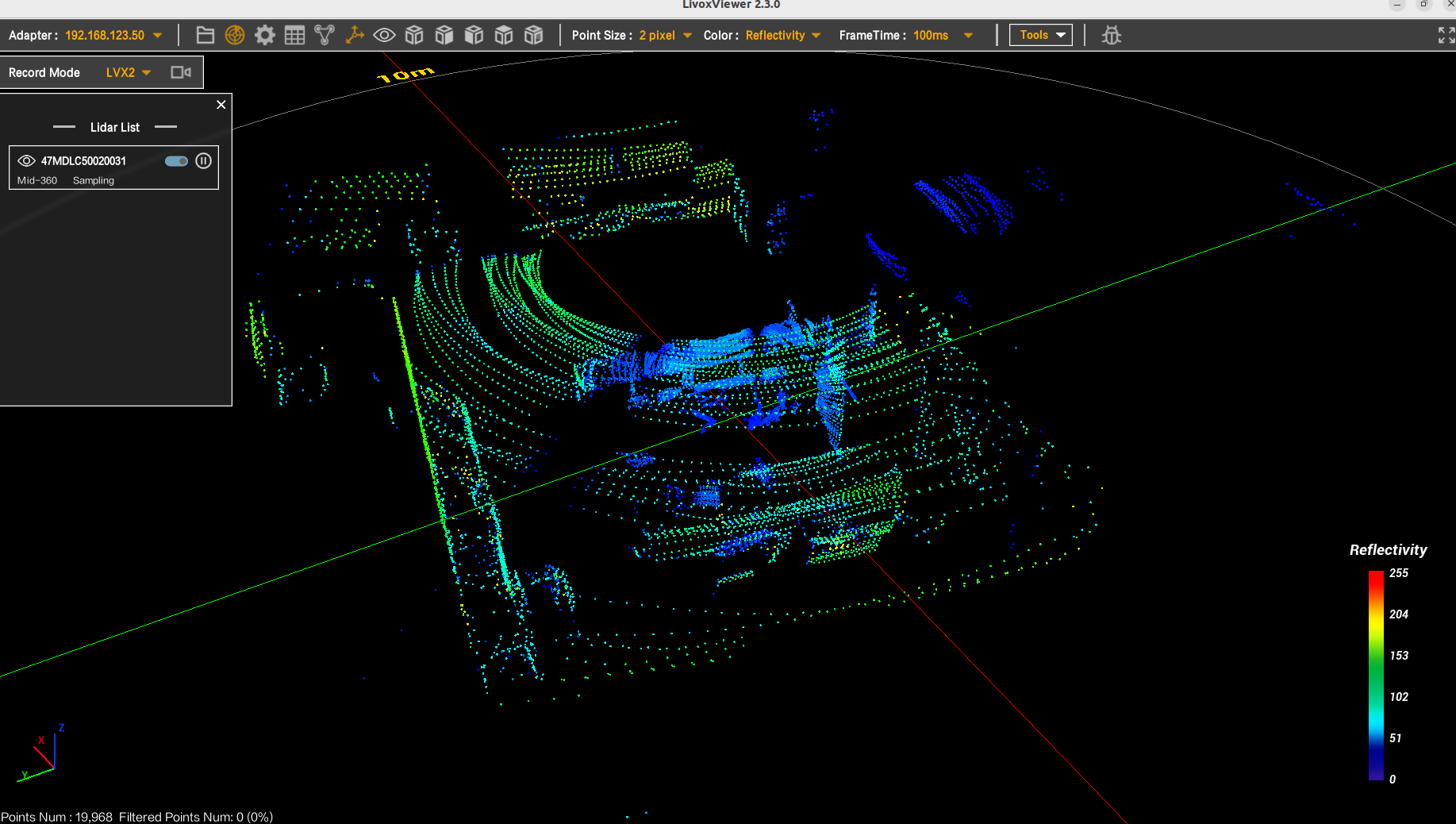
这里遇到的问题是连接不通。是因为激光雷达的IP地址配置不正确,按照文档去做就好了,没啥可说的。
我用的是二手的,所以IP地址更改了是:192.168.123.149,通过指令arp -n直接看。
2- ROS2
ros2 launch livox_ros_driver2 rviz_MID360_launch.py 运行
ros2 topic list 罗列出所有的话题
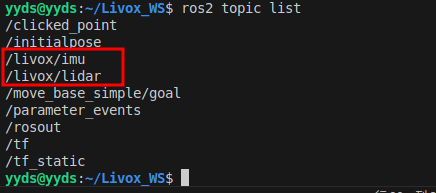
出现问题:
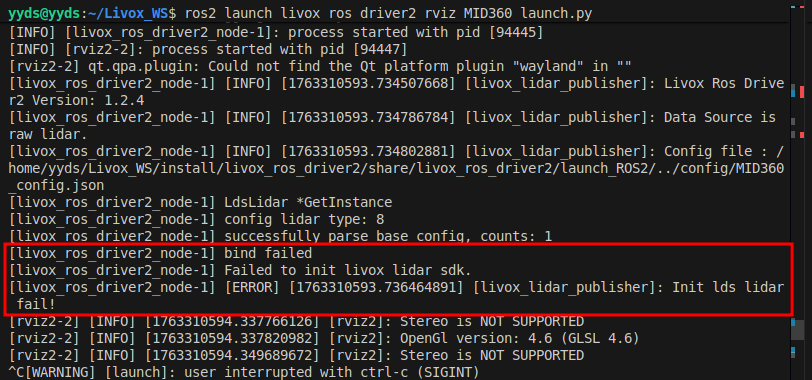
这里记得修改过ip地址后,要colcon build一下。这样才不会报错(否则install里面的文件的config.json是没有修改的)。另外还需要注意livox的IP地址有没有配置错误。
- tips: livox_sdk_driver2对应着sdk2,不要下载错误了。
3- Fast Lio
比较详细的教程博客园:
https://www.cnblogs.com/oliudaneng/p/18964156
https://zhuanlan.zhihu.com/p/461246350
#!bash
mkdir build
cd build
cmake ..
make check # optional, runs all unit tests
make install
- PCL网址:https://pointclouds.org/downloads/#linux
- Eigen网址:https://gitlab.com/libeigen/eigen/-/releases/3.3.4
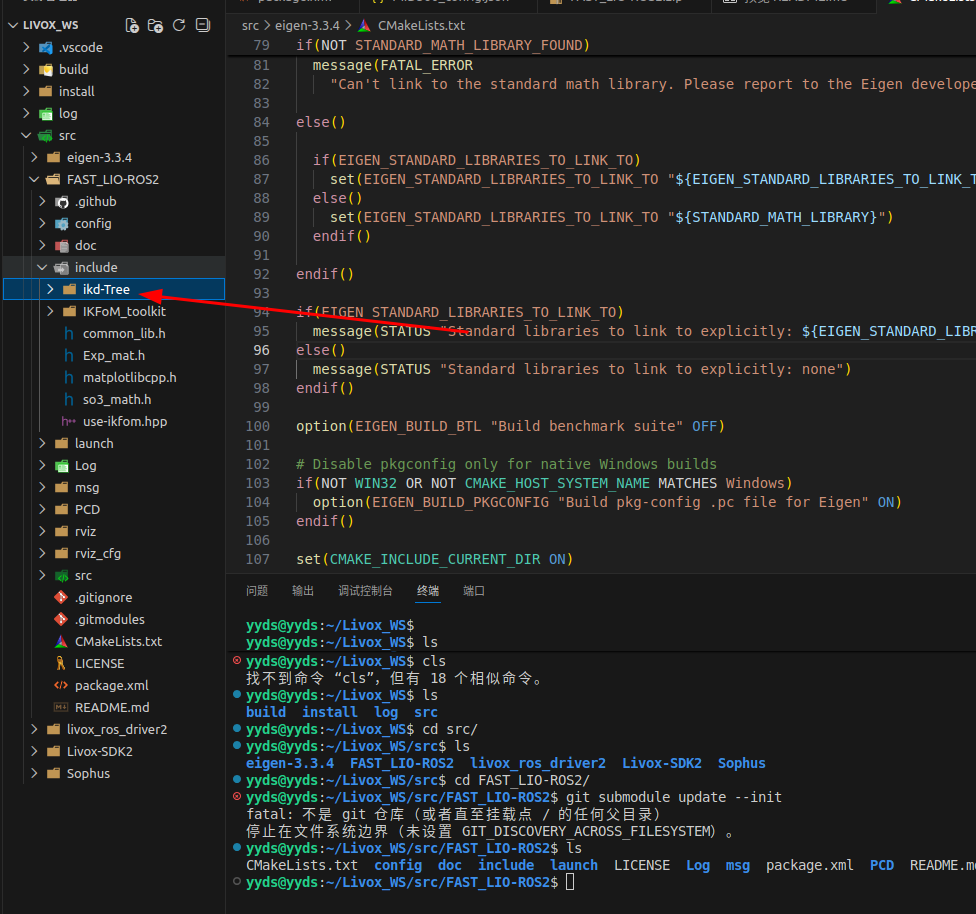
出现问题:原因是LIO2有ikdtree的部分,这部分找不到,需要自行git下来。见下面的链接说明。
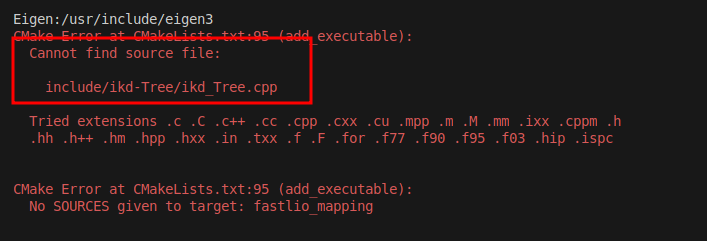
解决方法:
https://github.com/hku-mars/FAST_LIO/issues/24
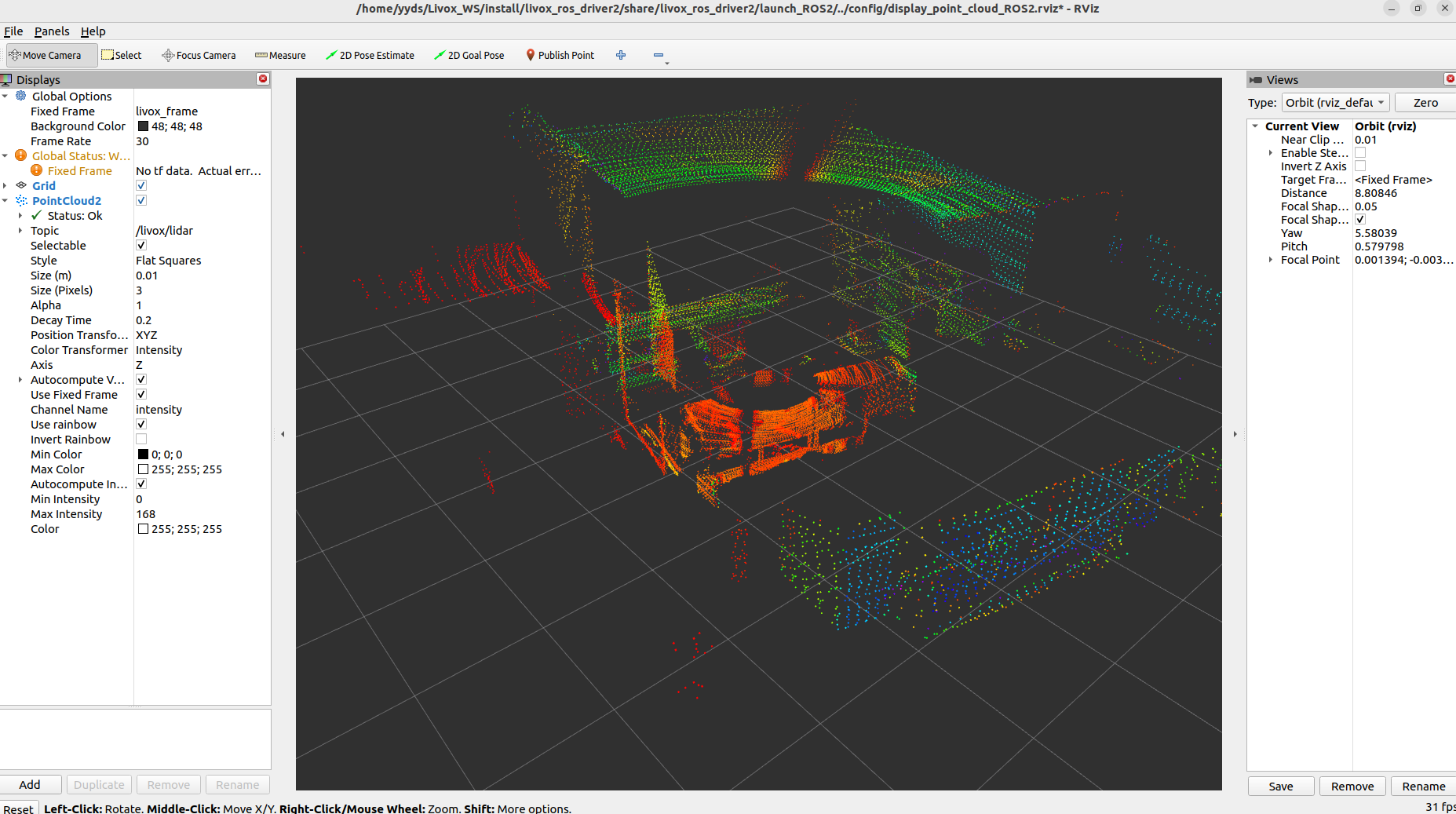
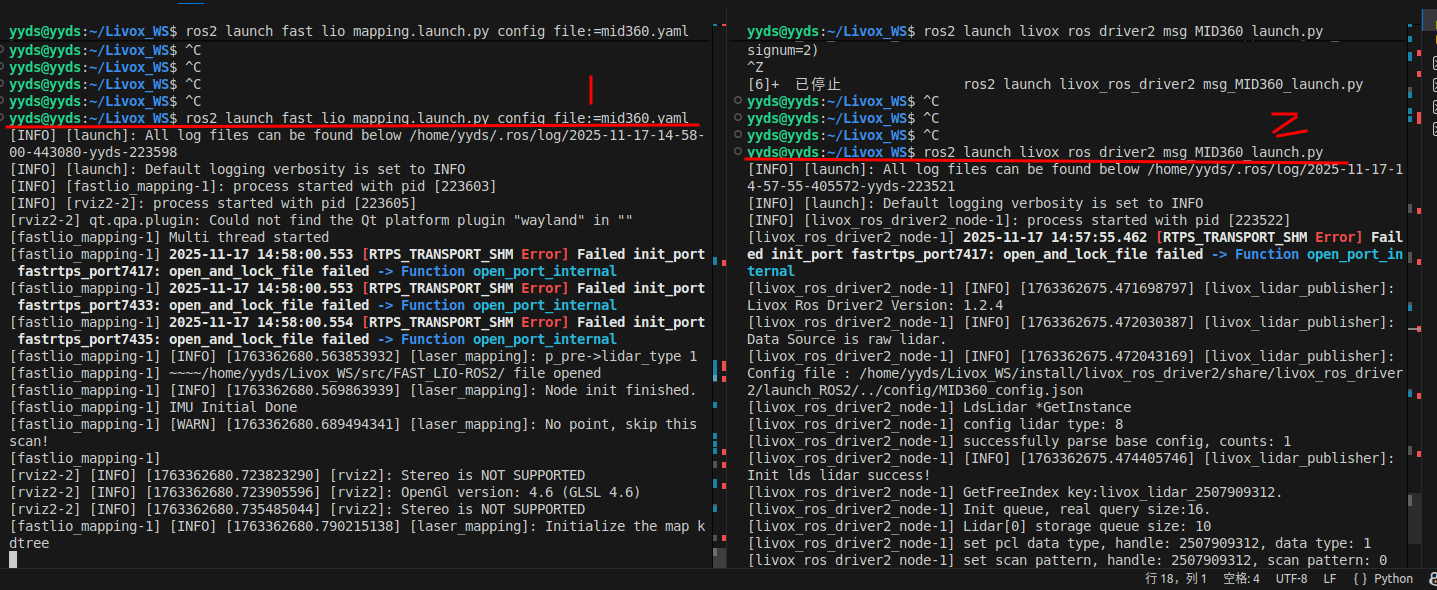
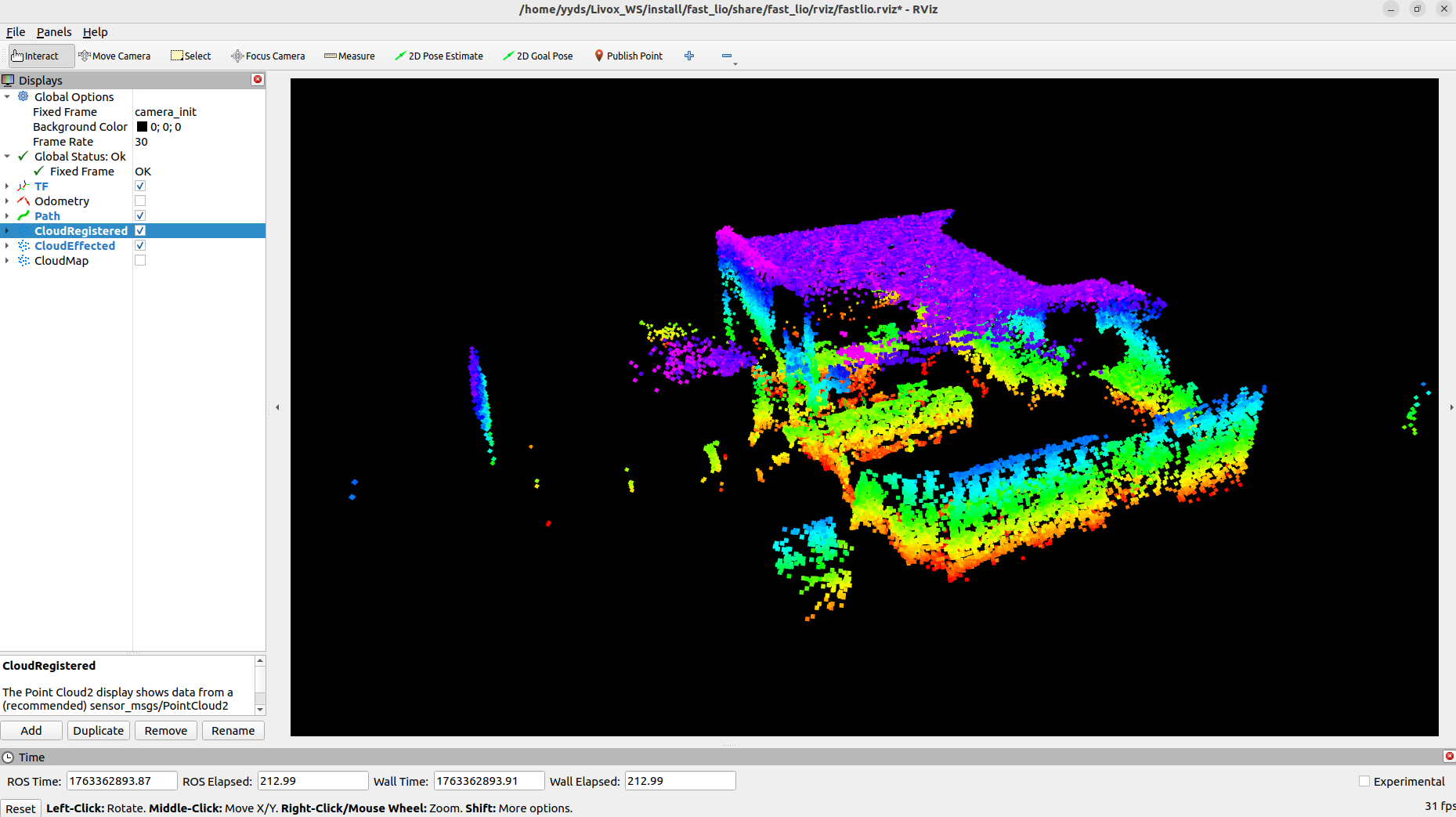
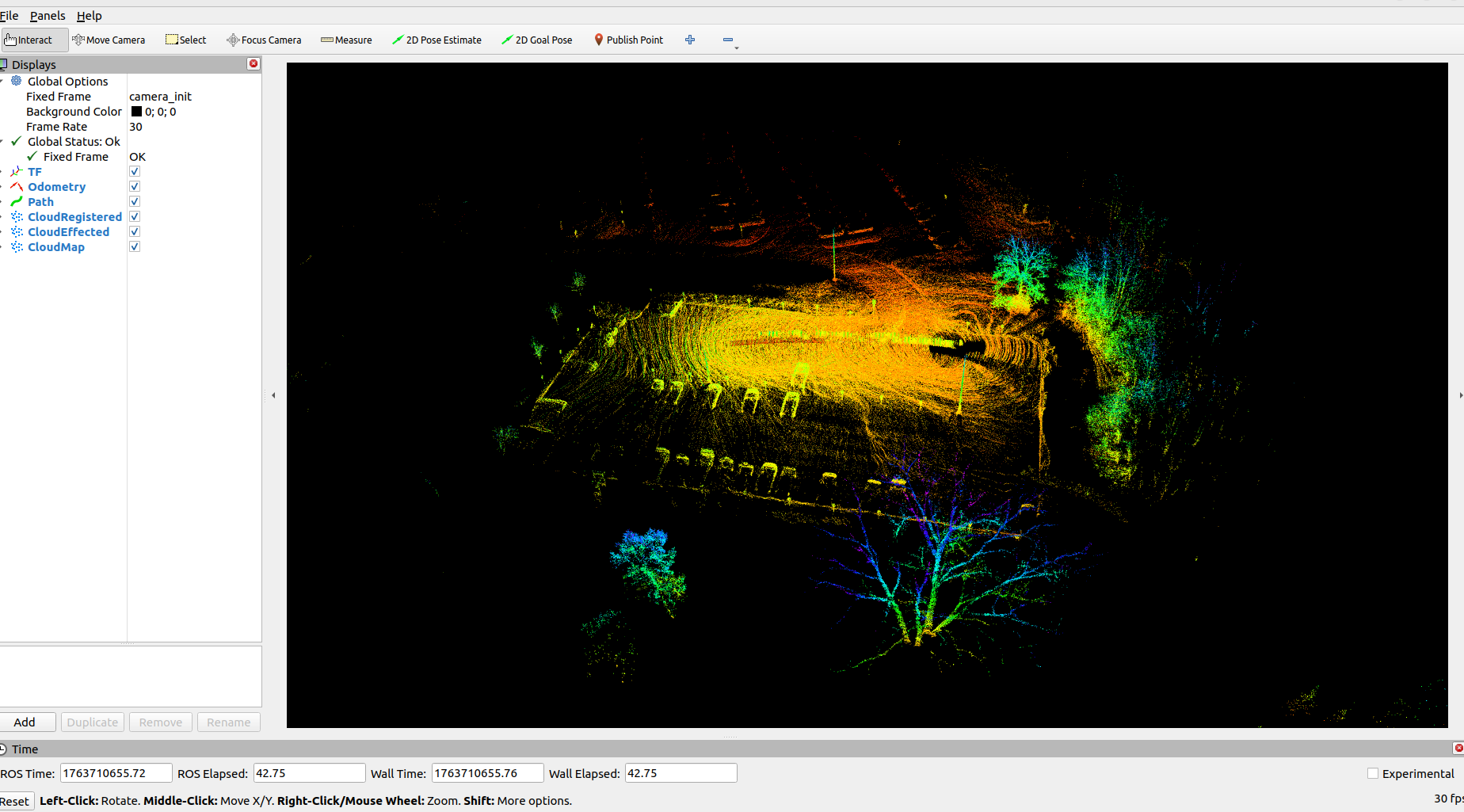
- 效果如下:
CLI
RVIZ
4- ROS2 bag play
详细博客教学
https://zhuanlan.zhihu.com/p/461246350
这次就是不连接livox,用录好的rosbag进行play,然后在rviz中展示出来。
他提供的rosbag链接附上。这个rosbag放哪里都可以。
这里需要安装rosbags进行ROS1到ROS2的数据包的类型转换,因为在ROS1中包的类型为.bag,而在ROS2中的类型为.db3,这就需要:
# 这里的输出路径最还是一个文件夹。同时rosbags;不依赖于ros1还是ros2的环境,运行环境与ros的版本无关。
rosbags-convert --src ROS1.bag --dst ROS2/
-
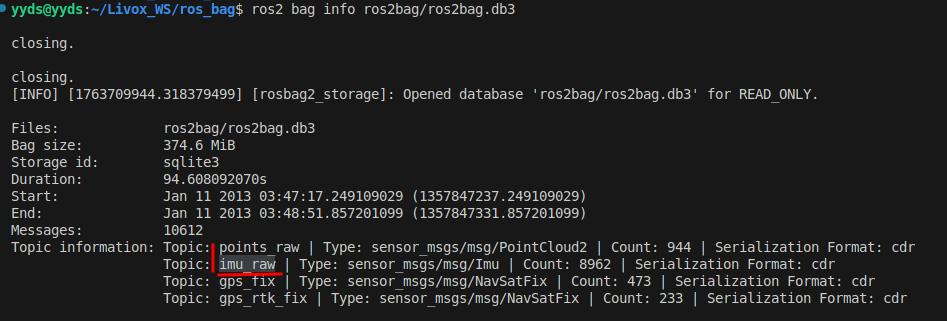
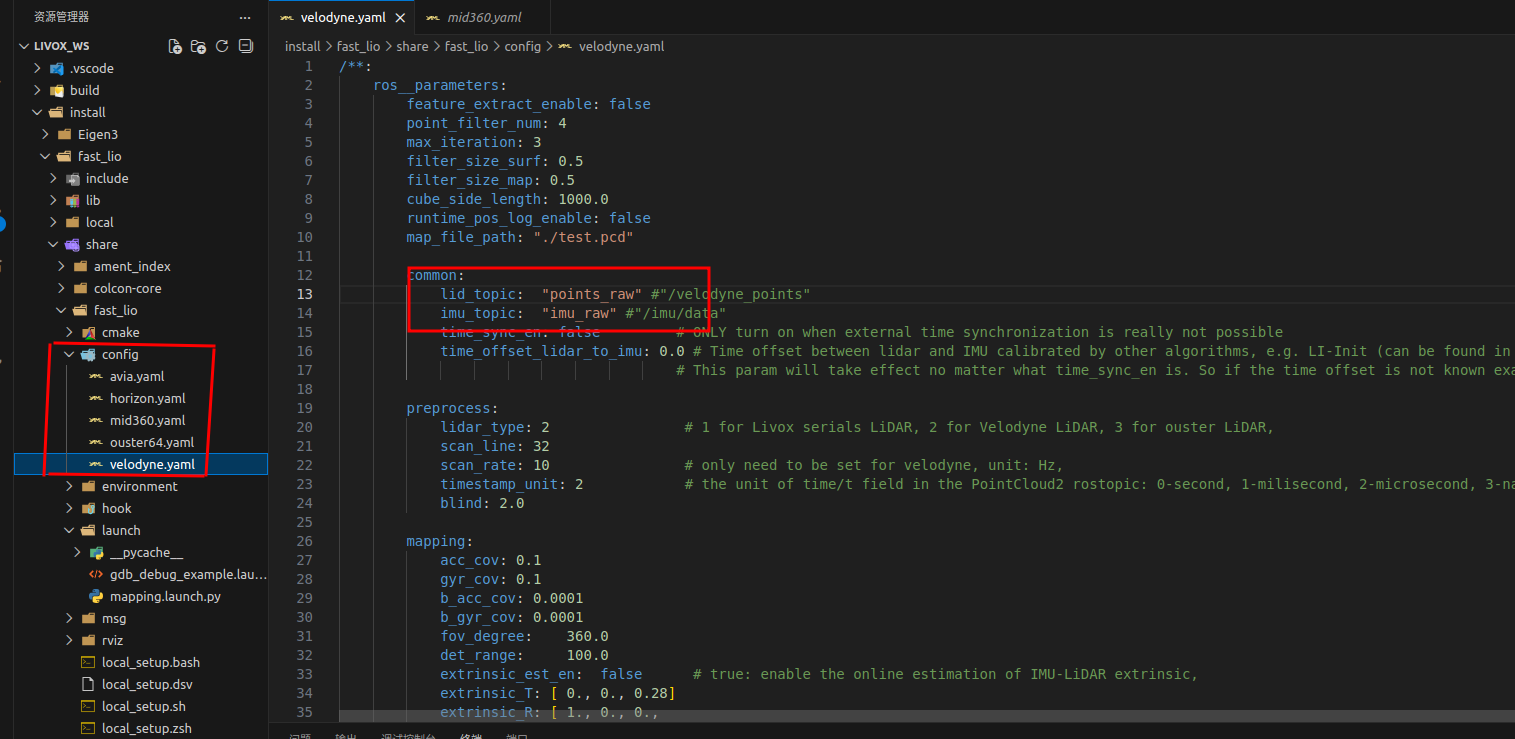
将launch文件的topic和bag的topic对齐:
-
控制指令,修改读取的yaml配置文件。
# 开启两个控制台
ros2 launch fast_lio mapping.launch.py config_file:=velodyne.yaml
ros2 bag info ros2bag/ros2bag.db3
5- 获取里程计
这个方法最大的特点是必须要用到一个地方,必须要有用处,也必须要会用。这是一个很重要的特点和方法。
总结
to be continued...

 浙公网安备 33010602011771号
浙公网安备 33010602011771号