燕山大学载重六足机器人研究:NOKOV 度量动作捕捉实现毫米级轨迹追踪与位姿获取验证
摘要
燕山大学许允斗教授研究团队基于切比雪夫连杆设计并研发了一款新型六足载重机器人——HexaBeast。该机器人通过优化腿足结构和多驱动系统,实现了高刚性、轻量化,具备20kg载重能力和卓越的多地形适应性,为复杂环境下的作业提供了创新的解决方案。本研究的关键验证环节采用了NOKOV度量动作捕捉系统,成功获取了机器人运动的精准位姿数据,有力证明了理论分析的正确性,并为机器人的优化迭代提供了可靠的实验依据。相关研究论文“Development of a Load‐Bearing, Terrain-Adaptive Hexapod Robot With Chebyshev-Linkage Legs”已发表于机器人领域的中国科学院二区期刊《Journal of Field Robotics》。
一、研究背景:复杂地形作业挑战与足式机器人
在诸多复杂和未知地形中,传统轮式机器人在动态调整和稳定移动方面存在显著不足。为克服这些局限,研究人员受到动物运动能力的启发,设计并发展了足式机器人,以期更好地应对如崎岖山地、泥泞沼泽、沙地和废墟等复杂环境。然而,足式机器人过多的驱动关节会增加系统故障率,并可能影响其负载能力。因此,如何优化驱动关节数量、提升足式机器人的负载能力,成为了当前机器人研究领域的一个重要焦点。燕山大学许允斗教授研究团队基于切比雪夫连杆设计并研发了一款新型六足载重机器人——HexaBeast。NOKOV度量动作捕捉系统为验证机器人模拟运动与实际运动的差异提供了位姿数据,数据显示理论值与实际值基本重合,证明了理论分析的正确性。
1. 研究方法概述:HexaBeast六足机器人系统设计与特性分析
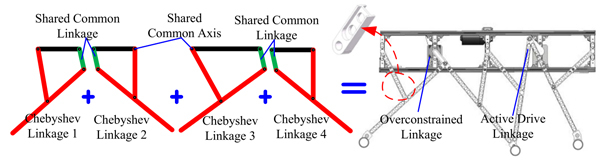
本研究提出了一种新型腿足结构设计——HexaBeast,该设计融合了基于切比雪夫连杆的过约束腿足架构、高刚性低摩擦原则以及多驱动系统,以提高机器人在雪地、沙地、水坑、冰面和沙漠等多种地形中的适应能力。
HexaBeast 机器人的腿部结构图
2. 系统整体平台设计
六足机器人采用切比雪夫连杆结构,由步进电机驱动,配合机身内舵机和直线电机实现横向移动与腰部扭转。特殊机架设计使得多驱动协同横向移动成为可能,实现机器人灵活的横向移动。在非横向移动时,机身可扭转以更好地适应复杂地形。
3. 创新腿部结构:过约束切比雪夫连杆
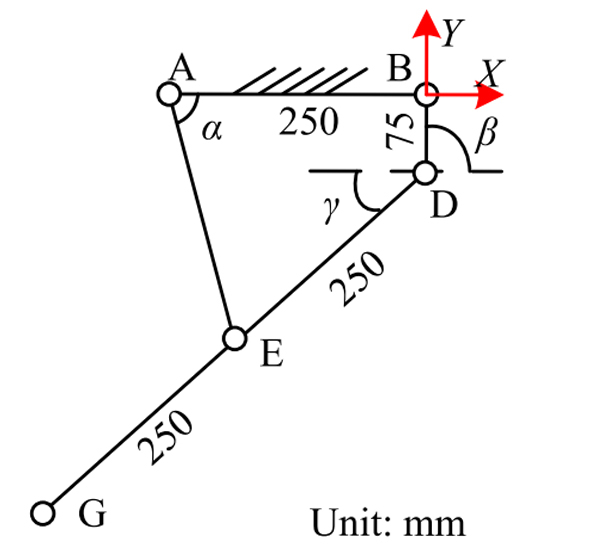
腿部由四个串联切比雪夫连杆组成超静定结构,这种设计有效减少了驱动关节数量,避免了复杂的传动机制,从而显著提升了承载力。特性分析表明,优化切比雪夫连杆长度(例如AE连杆长250mm时,能保证一定越障能力并将机身波动控制在最小)、采用过约束腿结构,能提升机器人性能和承载能力。
腿部力学静态分析显示,过约束结构相比非过约束结构,具有更高的刚度、更小的变形和更优的力分布,在特定角度下腿杆端点受力更小。更重要的是,在机器人运动过程中,过约束结构也能显著改善腿部受力情况。特殊机架设计多驱动协同横向移动机架结构,非横向移动时,机身可扭转适应地形。
切比雪夫连杆的长度参数
NOKOV度量动作捕捉系统在腿部结构性能评估中,能够提供高精度的运动学数据,为验证和优化腿部连杆机构的运动特性提供了重要的实验支撑。通过捕捉机器人腿部的精细运动,可以更准确地分析过约束结构在实际运行中的优势,从而进一步完善设计。
3. NOKOV度量动作捕捉技术在位姿获取中的应用
NOKOV度量动作捕捉系统通过布置在实验环境中的高帧率红外摄像头,精确追踪附着在机器人关键部位的反光标记点,从而实时获取机器人的三维空间位姿数据。该系统以其亚毫米级的定位精度和高刷新率,确保了对机器人复杂运动轨迹的忠实记录,为研究人员提供了详尽的运动学信息,是实现高精度载重机器人轨迹追踪的关键技术。
三、实验验证:NOKOV度量系统赋能机器人性能评估
1. 运动验证实验
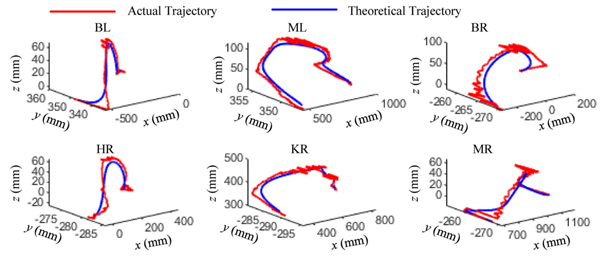
为验证机器人模拟运动与实际运动的差异,我们通过NOKOV度量动作捕捉系统采集了机器人运动数据。实验中共使用12个捕捉摄像头对随机选择的六个点(KR、MR、HR、BR、BL 和 ML)进行数据采集。结果显示,模拟与实际运动基本重合,验证了理论分析的正确性。NOKOV度量动作捕捉系统为此次六足机器人动作捕捉提供了高精度的运动学数据,助力证明了理论分析的正确性。
理论值(蓝色)与实际值(红色)的对比曲线
2. 环境适应性与载重能力实验
实验证明机器人在冰面、雪地、泥泞路面及沙地环境中行走性能良好。斜坡实验中成功通过10.77∘的斜坡。模拟腿部被困实验中能成功脱困并通过河床地形测试。转向实验中,机器人两种转向步态可稳定运行。横向移动实验中,5kg负重情况下横向移动正常。经负载能力实验确定机器人最大载重为20kg。
环境适应性及其他性能实验
四、动作捕捉系统与六足机器人研究FAQ
Q1:为何动作捕捉能提供“真值”数据?
A1:因为惯性测量(IMU)存在随时间累积的漂移误差。而NOKOV度量动作捕捉系统基于多台光学的全局绝对坐标测量,无累计误差,其亚毫米级的精度可用于标定和验证其他传感器(如IMU)的测量结果,故被视作“真值”参考。
Q2:为什么在本研究中需要“多机位姿融合”?
A2:单个机体的位姿不足以分析复杂系统的运动。NOKOV度量动作捕捉系统通过同时精确捕捉机身、多条支腿、多个关节的位姿,并进行数据融合,才能构建出完整的机器人全局运动模型,从而精准分析负载分布、步态效率、结构刚度的综合影响。
Q3: NOKOV度量动作捕捉系统在燕山大学六足机器人研究中的作用
A3: NOKOV度量动作捕捉系统主要用于运动验证实验提供精准位姿获取和载重机器人轨迹追踪数据,但在环境适应性等性能实验中,其高精度数据采集能力对于后续分析机器人在不同环境下运动模式的细微差异也具有重要参考价值,例如评估足底与地面的接触情况和步态稳定性。
五、应用场景:载重六足机器人的广阔前景
燕山大学研发的这款载重六足机器人HexaBeast,凭借其优异的多地形适应性和高负载能力,在诸多领域展现出广阔的应用前景。它不仅能应用于灾后救援、野外勘探等复杂环境作业,提供物资运输和信息采集支持;还可在军事和工业领域发挥重要作用,例如作为侦察机器人或在危险环境中执行维护任务。
六、结论:NOKOV度量动作捕捉在足式机器人研究中的重要作用
本研究成功开发了一款基于切比雪夫连杆的创新型六足载重机器人HexaBeast,并在其性能验证中取得了显著进展。。燕山大学的这项机器人研究为足式机器人在实际应用中克服复杂地形挑战奠定了坚实的基础。
NOKOV度量动作捕捉系统通过提供高精度的位姿数据和轨迹追踪信息,使得理论模型与实际运动的高度吻合得以证实,极大地增强了研究成果的可靠性。未来,NOKOV度量动作捕捉技术将继续作为足式机器人研究领域的重要工具,为新型机器人的设计优化、控制算法验证以及复杂环境下的交互研究提供精准、可靠的实验数据。
七、作者简介
燕山大学研究团队
鞠忠金,燕山大学机械工程学院机械电子工程博士在读。主要研究方向:可重构足式机器人结构研究,足式机器人稳定性控制研究。
吴睿,燕山大学机械工程学院硕士毕业生,现于西部超导从事超导磁体设计相关工作。主要研究方向:多足机器人构型设计。
郭大猛,燕山大学机械工程学院机械电子工程硕士在读。主要研究方向:多足爬壁机器人。
许允斗(通讯作者),燕山大学机械工程学院系主任、教授、博士生导师。主要研究方向:特种机器人、可展机构、混联机构。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号