NOKOV度量动作捕捉高精度位姿数据助力水下SLAM精度验证:RUSSO系统实验解析| IROS 2025哈工大(深圳)、天大研究案例
导语
水下环境为SLAM系统带来了GPS不可用、光照变化剧烈及结构稀疏的独特挑战。
哈工大(深圳)与天津大学团队提出RUSSO水下SLAM系统,首次融合双目相机、IMU和成像声呐,实现六自由度(6-DoF)鲁棒定位。
实验中,NOKOV度量动作捕捉系统提供水下机器人高精度位姿真值,是量化RUSSO精度与鲁棒性的核心工具。
一、 研究方法概述
本文针对水下视觉退化问题,首次提出了一种融合双目相机、IMU 与成像声呐的水下SLAM系统 - RUSSO,实现用于六自由度(6-DoF)估计的鲁棒且精确的水下定位。室内实验中,NOKOV度量水下光学动作捕捉系统提供水下机器人高精度位姿真值,助力评估RUSSO系统的定位精度与鲁棒性。
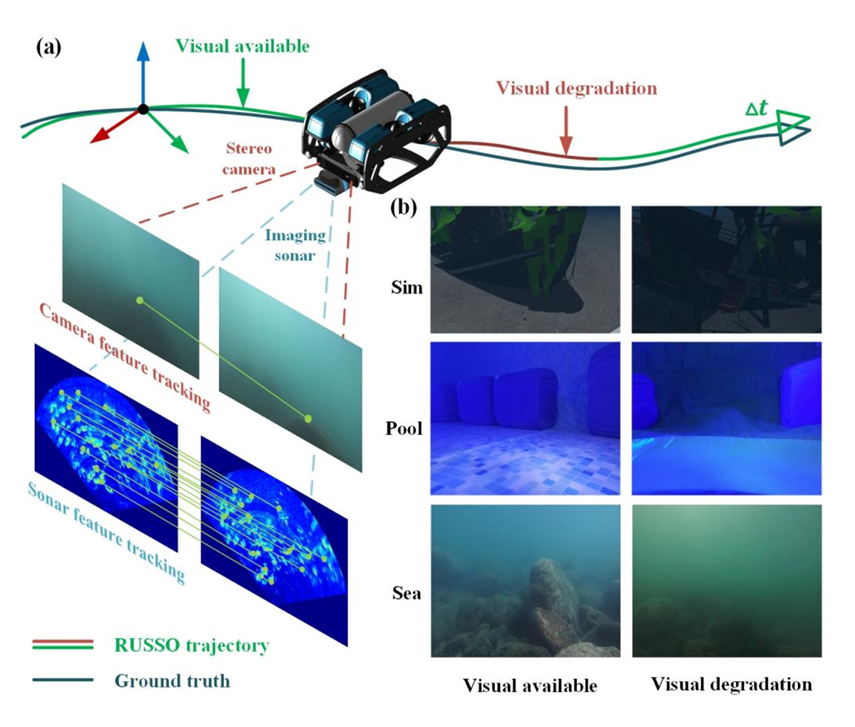
(a) 本文方法示意图。当在 ∆t 帧发生视觉退化时,成像声呐的特征跟踪作为机器人位姿估计的约束,从而减少位姿漂移。(b) 水下模拟器、水池和海洋中视觉可用与视觉退化场景的样本。
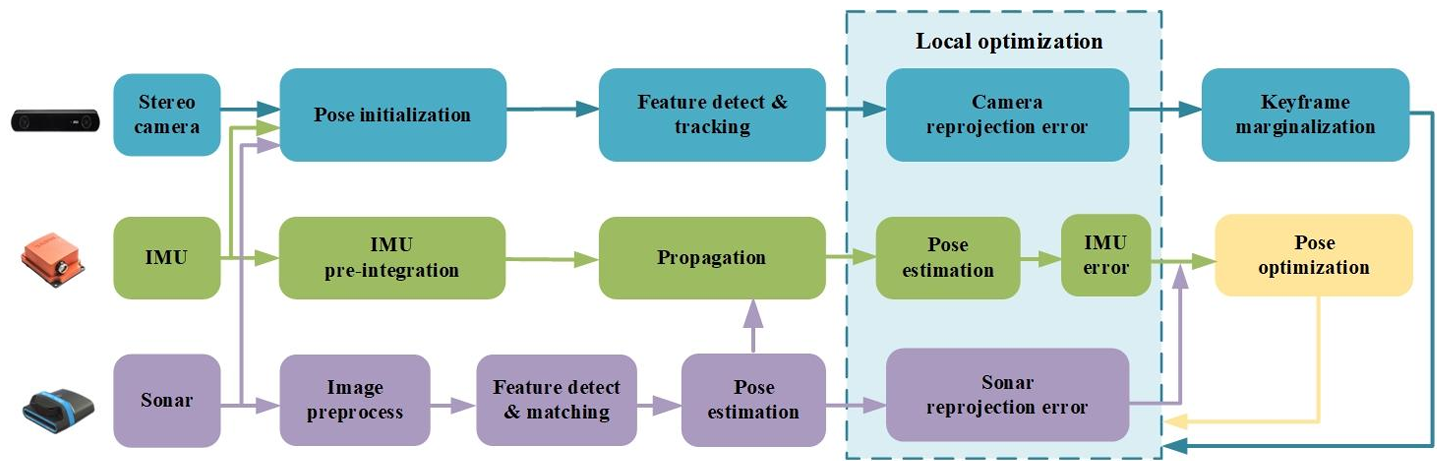 RUSSO 系统的整体框架,其中成像声呐融合被集成到 VIO 系统中。紫色框和连线表示对 VIO 系统新增的扩展部分
RUSSO 系统的整体框架,其中成像声呐融合被集成到 VIO 系统中。紫色框和连线表示对 VIO 系统新增的扩展部分
1. 多模态传感器融合
RUSSO系统在视觉-惯导里程计基础上,融合成像声呐以增强视觉退化条件下的鲁棒性。当视觉特征不足时,声呐提供位姿约束,降低漂移。
2. IMU传播优化
提出IMU传播优化方法:利用声呐位姿估计作为先验,提高视觉退化期间IMU传播精度,并减少位姿漂移。
3. 鲁棒初始化
在视觉特征缺失环境中,通过相邻声呐帧位姿完成初始化,保证SLAM系统稳定启动。
二、 研究贡献
1) 据作者所知,该研究是首个融合成像声呐与立体相机及IMU的水下SLAM研究工作;
2) 提出了一种新颖的IMU传播优化方法,在视觉退化期间利用声呐位姿估计提供良好先验,从而提升IMU传播精度并减少定位漂移;
3) 为应对挑战性环境下的视觉初始化失败问题,提出了一种鲁棒的SLAM初始化方法,直接利用成像声呐相邻两帧之间的位姿估计进行初始化;
4) 开展了从水下模拟器到真实实验室水池及开阔海域的大量实验,验证了所提出的RUSSO系统在视觉退化环境中的鲁棒性与准确性。
三、 实验设计
1. 室内水池与浅海实验
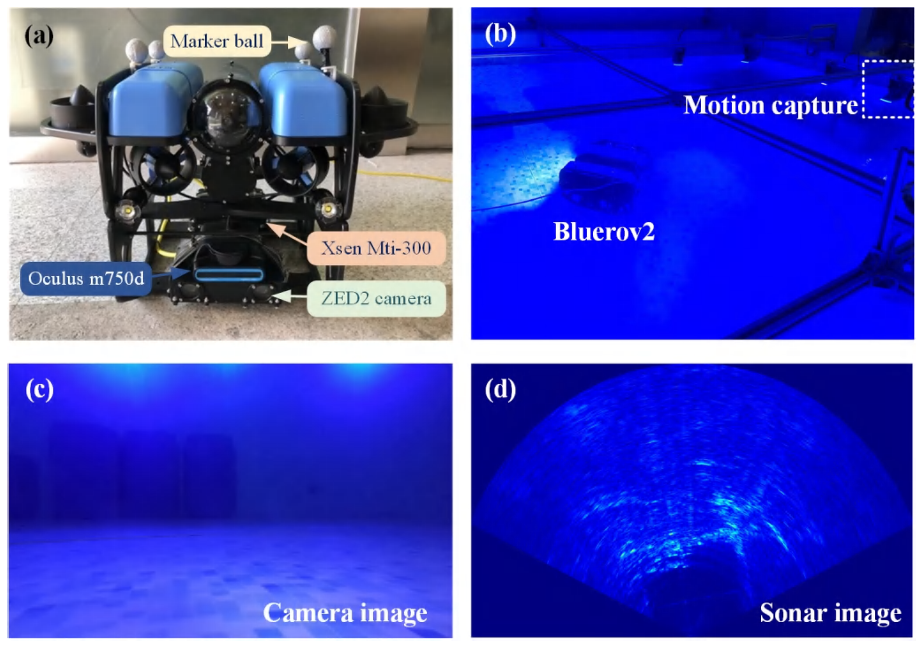
本文实验平台。(b) 水池中搭建的配备NOKOV度量动作捕捉系统的实验环境。(c) 水池中的ZED2相机图像。(d) 水池中的Oculus m750d成像声呐图像。
实验平台包括水下模拟器、实验室水池及浅海区域。NOKOV度量动作捕捉系统为水下机器人提供高精度位姿真值,用于SLAM精度验证。开展了从水下模拟器到真实实验室水池及开阔海域的大量实验,验证了所提出的RUSSO系统在视觉退化环境中的鲁棒性与准确性。
2. 对比算法
实验对比SVIn2(仅相机+IMU)及VINS-Fusion算法。RUSSO在视觉退化条件下保持最高定位精度及地图一致性。
3. 实验结果与分析
水下SLAM系统定位精度对比表格
|
算法
|
平均误差
|
视觉退化误差
|
初始化成功率
|
|
RUSSO
|
最低
|
稳定
|
100%
|
|
SVIn2
|
高
|
漂移明显
|
失败
|
|
VINS-Fusion
|
中
|
增加漂移
|
部分失败
|
IMU传播优化效果
- 引入声呐位姿降低IMU传播误差
- 提升视觉退化下状态估计稳定性
- 移除视觉信息后仍能维持基础定位能力
初始化验证
- 视觉特征缺失时RUSSO通过声呐辅助成功初始化
- SVIn2初始化失败,VINS-Fusion误差明显增加
四、 结论与应用价值
该研究的提出的RUSSO系统在仿真、水池及浅海实验中均优于传统视觉-惯性SLAM算法。
NOKOV度量动作捕捉系统作为高精度位姿真值来源,是验证SLAM系统精度与鲁棒性的关键工具。
该系统适用于水下勘测、测绘及自主水下任务场景,显著提升偏航角估计精度。
五、 鲁棒水下SLAM:首次融合成像声呐、双目相机与IMU的RUSSO系统FAQ
Q1: RUSSO水下SLAM系统的核心创新?
A1: 融合双目相机、IMU与成像声呐,实现视觉退化环境下鲁棒六自由度定位,并提出IMU传播优化方法。
Q2: NOKOV度量动作捕捉在研究中的作用?
A2: 提供水下机器人高精度位姿真值,量化SLAM系统精度与鲁棒性。
Q3: RUSSO相比传统VIO算法优势?
A3: 在视觉退化环境保持高定位精度,初始化成功率高,IMU传播误差低,适用于复杂水下任务。
六、 参考文献
来自哈工大(深圳)和天津大学的研究团队在工程技术类一区期刊 IEEE/ASME Transactions on Mechatronics (TMECH) 发表题为《RUSSO: Robust Underwater SLAM with Sonar Optimization against Visual Degradation》的论文,论文同时被IROS 2025收录。
引用格式
S. Pan, Z. Hong, Z. Hu, X. Xu, W. Lu and L. Hu, "RUSSO: Robust Underwater SLAM With Sonar Optimization Against Visual Degradation," in IEEE/ASME Transactions on Mechatronics, vol. 30, no. 6, pp. 5456-5467, Dec. 2025, doi: 10.1109/TMECH.2025.3550730.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号