Science Robotics|浙大高飞团队发布无人机自主特技飞行系统,光学动作捕捉提供真实位姿及轨迹验证
2025 年4 月 16 日,浙江大学控制科学与工程学院高飞教授团队在 Science Robotics 发表论文 “Unlocking Aerobatic Potential of Quadcopters: Autonomous Freestyle Flight Generation and Execution”(王鸣杨为第一作者)。研究提出了一套可在复杂环境中自主生成并执行高难度特技飞行动作的完整系统,其表现可与专业飞手媲美。
为了验证系统在狭窄空间与高动态飞行条件下的轨迹精度,本研究采用 NOKOV度量动作捕捉系统获取无人机实时三维位姿数据真值,用于评估轨迹规划的动态可行性、姿态快速切换能力与控制策略鲁棒性。
一、研究背景:为什么“特技意图生成 + 狭窄环境飞行”长期未被解决?
近年来,强化学习与模型预测控制已在无人机竞速场景中取得优秀成绩(Song et al., Kaufmann et al.)。然而,这类竞速动作仅考虑最终结果,并未具备响应任意姿态变化的能力。而这,恰恰是特技飞行的核心难点。
基于人类意图生成多样化的特技动作是特技飞行尚未解决的核心目标。现有研究方法在避障能力上也存在明显不足,仅适用于开阔、无障碍的环境。因此在复杂场景中难以保证轨迹的动态可行性。
针对这些挑战,高飞老师团队展开了相关研究,让无人机在复杂环境中,能够自主生成并顺利执行复杂且连续的特技飞行动作。
二、研究亮点:从动作表达到控制补偿的完整自主特技飞行框架
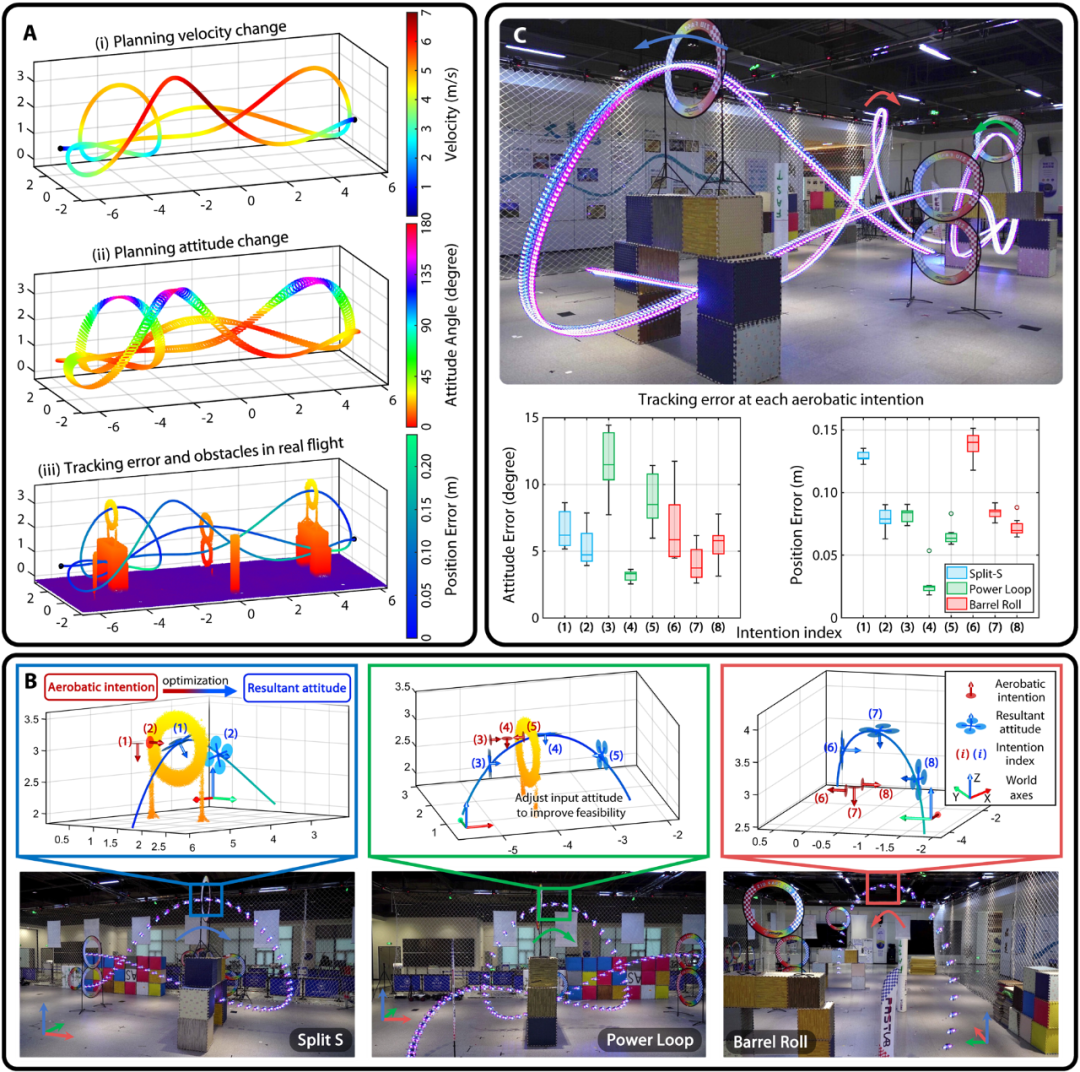
1. 指令:本研究提出了一种通用的飞行表示方法,将飞行过程简洁地表示为一系列离散的特技意图。这些意图包含拓扑结构和姿态的变化,能够以多种方式组合,用于表达复杂的飞行动作。
2. 规划:本文还设计了一种时空联合优化的轨迹规划器,用于生成动态可行、平滑且无碰撞的飞行轨迹。
3. 控制:针对特技飞行中偏航控制的敏感性问题,本文深入分析了微分平坦性奇异性对偏航旋转带来的内在影响,并提出了相应的动态补偿方法,以规避由此引发的控制问题。
三、现实实验:无人机自主完成连续高难度动作,NOKOV 度量动作捕捉系统提供真实轨迹验证
研究团队在开放环境和狭窄空间进行了多项实验,以验证轨迹规划与控制策略的有效性。
实验一:户外环境中的自主特技飞行(无框架环境)
系统根据特技意图生成飞行轨迹,无人机自主完成:高速机动、姿态大幅变化、精确推力与角速度控制,验证了在开阔环境下的自主特技飞行能力。

大规模无框架环境中的特技飞行实验
实验二:狭窄空间中的连续特技动作
实验场景高度仅 3.5 m,障碍密集。
无人机需要:在受限空间内生成动态可行轨迹、执行频繁姿态切换、避开多个障碍物
狭窄空间中的连续特技动作实验,NOKOV度量动作捕捉系统提供无人机实时位姿数据
研究使用 NOKOV度量动作捕捉系统实时获取无人机位姿数据,用于:
- 动态可行性验证
- 姿态过渡精度分析
- 轨迹误差对比评估
实验显示,即使意图点间距过密,系统仍能通过轨迹自动调整,成功完成连续动作
执行特技飞行的同时避开障碍物,NOKOV度量动作捕捉系统提供无人机实时位姿数据
与专业飞手的性能对比
高飞团队提出的自主系统与拥有5年飞行经验的专业人类飞手进行比较。实验结果显示,在执行单个功率环动作和连续多个功率环任务中,文章中系统成功率均为100%,成绩超过专业飞手。由此验证了本文系统在执行复杂特技动作时的性能和稳定性,特别是在连续执行多个特技动作时的成功率和轨迹优化能力。

连续执行功率环动作的成功率统计数据
由此验证了本文系统在执行复杂特技动作时的性能和稳定性,特别是在连续执行多个特技动作时的成功率和轨迹优化能力。
五、NOKOV度量动作捕捉系统在本研究中的作用
NOKOV 提供的无人机位姿真值数据在本研究中承担了核心验证角色:
- 作为无人机飞行轨迹的真实基准,用于误差计算
- 验证狭窄空间中多次姿态切换的精度
- 用于对比专业飞手与自主系统的执行差异
- 支撑时空联合规划模型的真实动态可行性分析
- 评估偏航补偿策略对无人机轨迹跟踪的影响
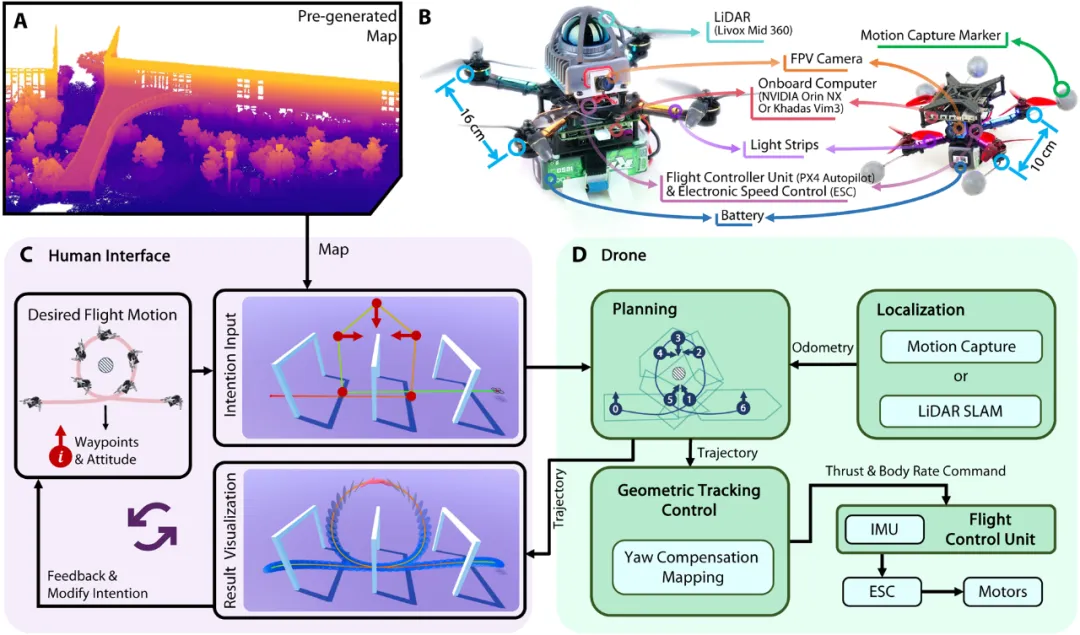
硬件和系统架构规格
在高速、多动作、受限空间飞行这一高动态场景中,精准位姿测量至关重要。NOKOV度量动作捕捉系统为研究提供高精度、实时的无人机位姿数据,助力验证无人机在狭窄空间中执行复杂特技动作时的飞行性能。
六、无人机复杂环境自主规划特技飞行动作研究FAQ
Q1:浙大高飞团队这项研究的主要创新点是什么?
A1: 该研究提出了一套完整的自主特技飞行框架,包括将复杂动作拆解为“特技意图”的通用表示法、时空联合优化的轨迹规划器,以及针对偏航控制敏感问题的动态补偿方法,使无人机能在复杂场景中自主生成并执行连续特技动作 。
Q2:该无人机系统与专业人类飞手相比表现如何?
A2: 在执行单个和连续多个“功率环(Power Loop)”任务的实验中,该自主系统的成功率均为 100%,成绩超过了拥有 5 年飞行经验的专业人类飞手,验证了其极高的稳定性和轨迹优化能力 。
Q3:研究中如何验证无人机飞行的精度?
A3: 团队采用了 NOKOV 度量动作捕捉系统 获取无人机实时的三维位姿真值。这些高精度数据用于计算轨迹误差、评估姿态快速切换能力,并支撑时空联合规划模型的动态可行性分析 。
Q4:该系统如何处理狭窄空间中的障碍物?
A4: 系统设计了具备避障能力的轨迹规划器,能够根据特技意图在仅 3.5 米高的狭窄且密集障碍物空间内,自动调整轨迹以避开障碍,同时保证动作的动态可行性和平滑性 。
Q5:该研究解决了特技飞行中的哪些传统难题?
A5: 研究解决了传统方法难以在复杂场景保证轨迹动态可行性的问题,并针对“微分平坦性奇异性”引发的偏航控制难题提出了补偿方案,使无人机能响应任意姿态变化 。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号