光学动作捕捉系统在自动化控制领域中的应用
近年来,各行各业逐步开展了自动化设备的研究,其中以无人机技术和机器人技术的发展尤为迅速,许多高校和科研单位正围绕着这两个方向进行多种应用场景的研究。
无人机领域
在无人机领域,常见的研究方向是多无人机编队技术,这在科研中被称为“多智能体协同控制”,研究者需要通过对无人机的定位,获取其在空间中的位置,这种位置信息主要是六自由度姿态数据,接着进行多智能体之间通讯的建立,最后通过控制决策系统,根据各智能体的空间位置,完成协同控制。通过此技术,可以应用于多个领域,如军事中的“蜂群”作战系统,电网、管道的无人机巡检,文娱行业的无人机编队表演,建筑行业的无人机智能建造等等。

上过19年春晚的扑翼机器人(无人机)-哈尔滨工业大学(深圳)
定位无人机的空间位置,是多智能体协同控制研究中最为重要的部分,只有获取到准确而又稳定的定位信息,才能良好地控制无人机。作为定位的传统方法,惯性测量单元(IMU)和惯性导航模块(INS)存在陀螺仪零点漂移严重,导致获取的方位、姿态、速度等数据精度不高,存在误差累计,很难长时间独立工作。而光学动作捕捉系统凭借着高精度、高实时性、可在实验室环境下模拟场景的特点,正逐渐被研究者们所青睐,其中北京理工大学自动化学院通过使用NOKOV(度量)光学三维动作捕捉系统,获取亚毫米精度的无人机位姿信息,结合多无人机即多智能体之间的通讯网络和控制决策系统,已经摸索出一套网络化多智能体空地协同控制实验平台,可以通过控制端远程发送指令,让无人机、无人车进行指定的编队协作。
机器人领域
基于同样的定位原理,机器人研究也正在多个领域中开花结果。应用于工业制造流水线、物流仓储场景的机械臂,通过对其模块化机械臂和灵巧手捕捉,获取其姿态数据,进行相应的控制规划;可在抗震救灾、军事场景应用的多足机器人,通过对其足部的关节角度、速度信息的捕捉,优化其在不同环境下的运动模式;而残障人士、特种士兵装配上外骨骼机器人,在光学动作捕捉系统的协助下获取关节角度等运动学步态信息,优化外骨骼结构,从而更好地对佩戴者进行多方面的协助,使用同样原理的还有康复机器人、仿人机器人等。
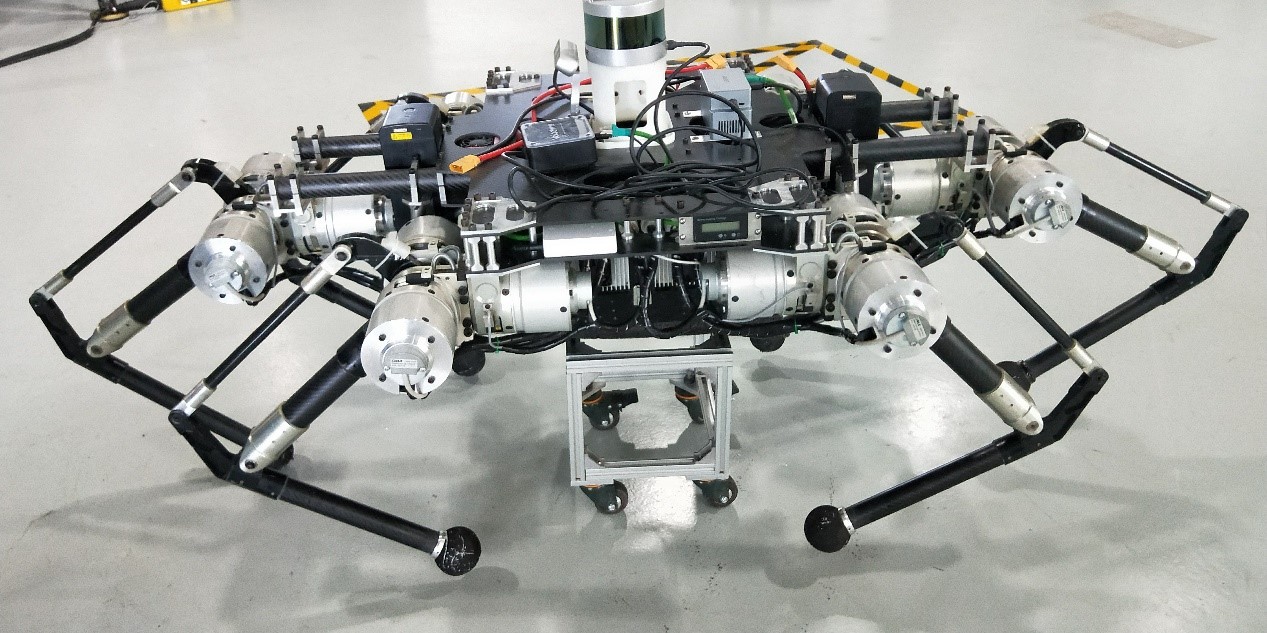
六足机器人-上海交通大学
除此之外,还有多种机器人的研究正在进行中,如哈尔滨工业大学深圳校区机电工程与自动化学院,使用NOKOV(度量)光学三维动作捕捉系统对扑翼机器人的“躯干”、“翅膀”进行定位分析,优化其飞行姿态;在同一实验室,另一个课题组通过度量光学动作捕捉系统捕捉人手精密动作,构建仿人手机器人,意在提高流水线上细小零件组装的效率,该用户已根据该实验发了两篇EI文,证明了实验的有效性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号