

简单FOC
电角度 = 机械角度*极对数
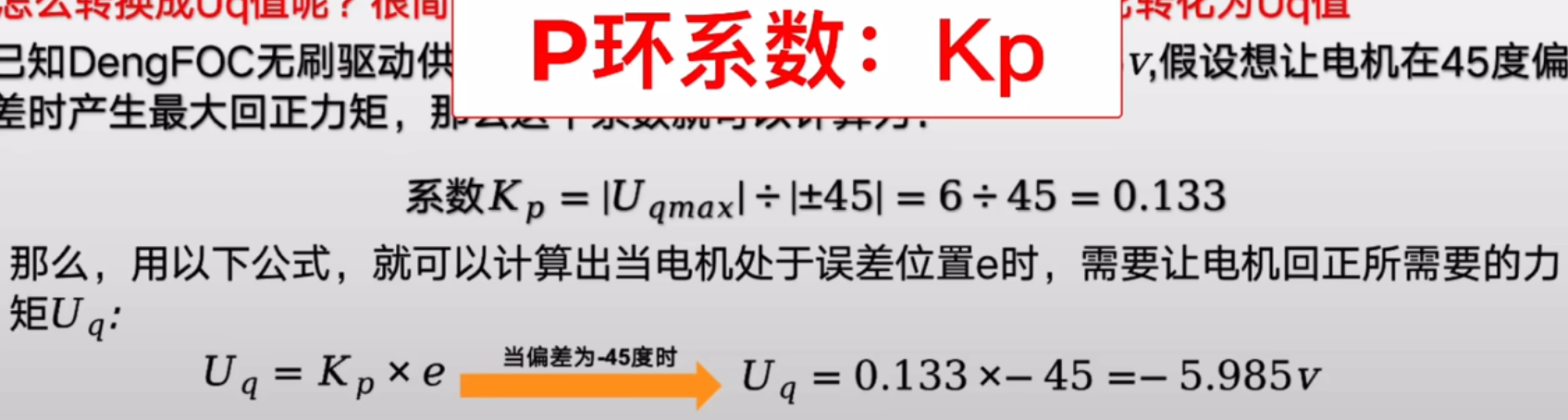
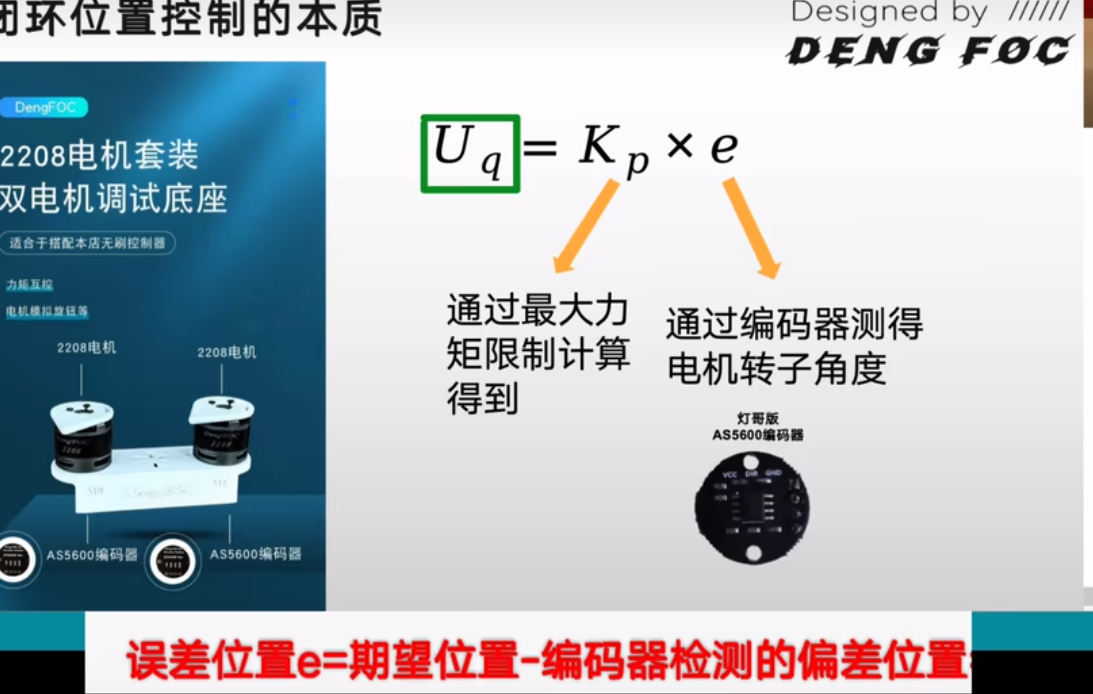
实际上这个Kp在到达位置之前是不会变的 所以电压Uq会是一个逐渐减小的过程
当然这是位置环→力矩环的过程
还有位置环→速度环→力矩环 继续
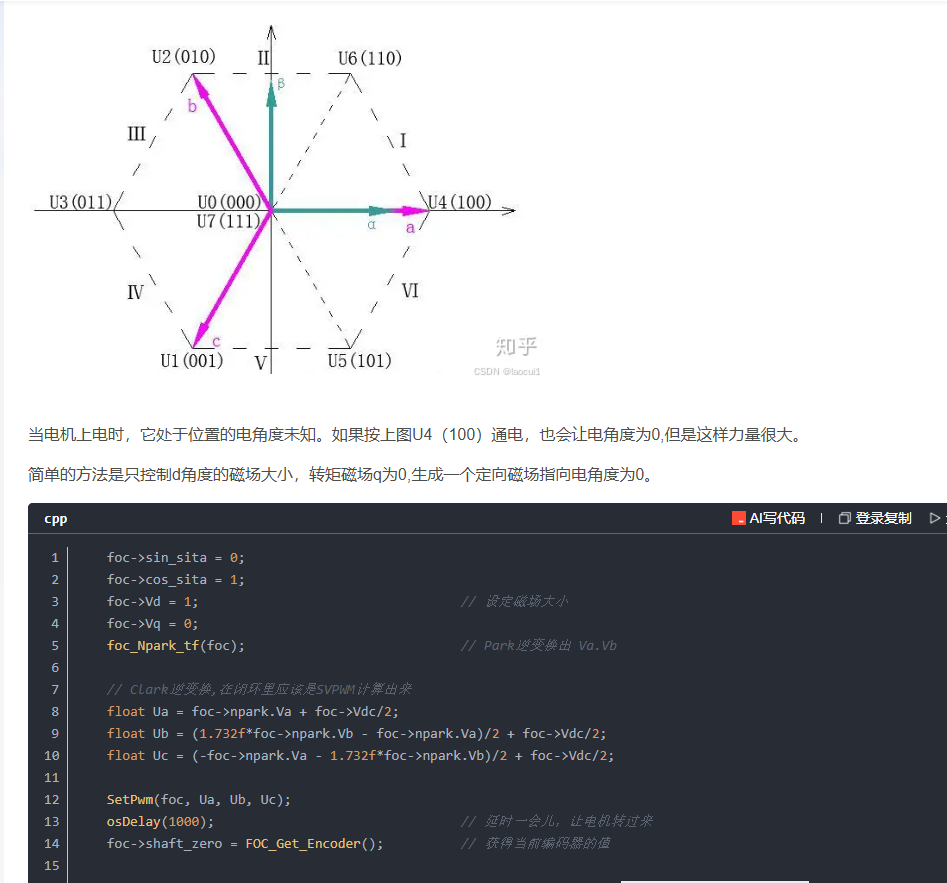
电机零电角校准
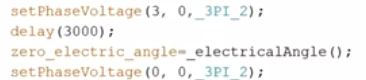
这个原理后面会讲
我来找一找
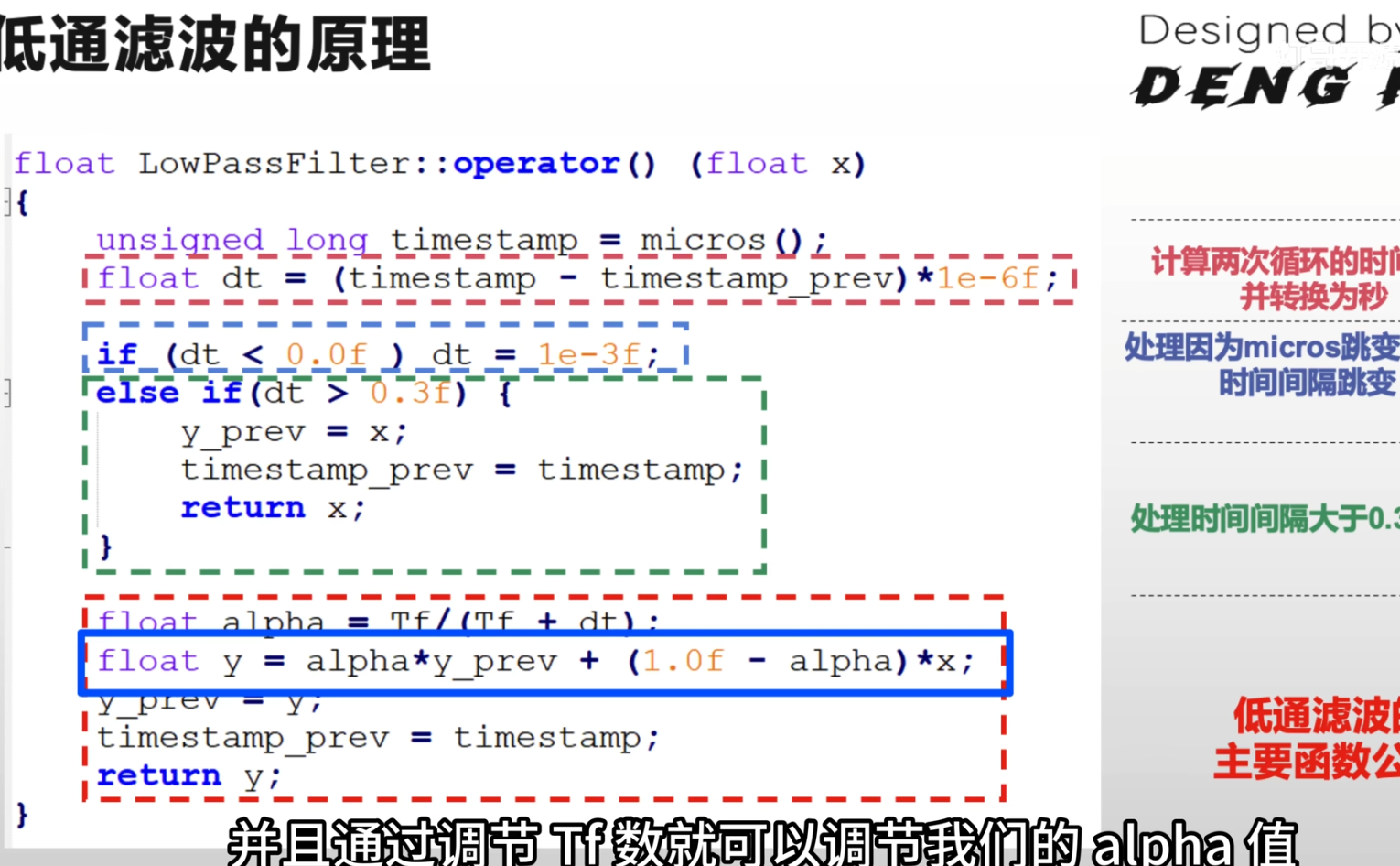
非常简陋的低通滤波
滤波值=前一个值*权重+后一个值*(1-权重)
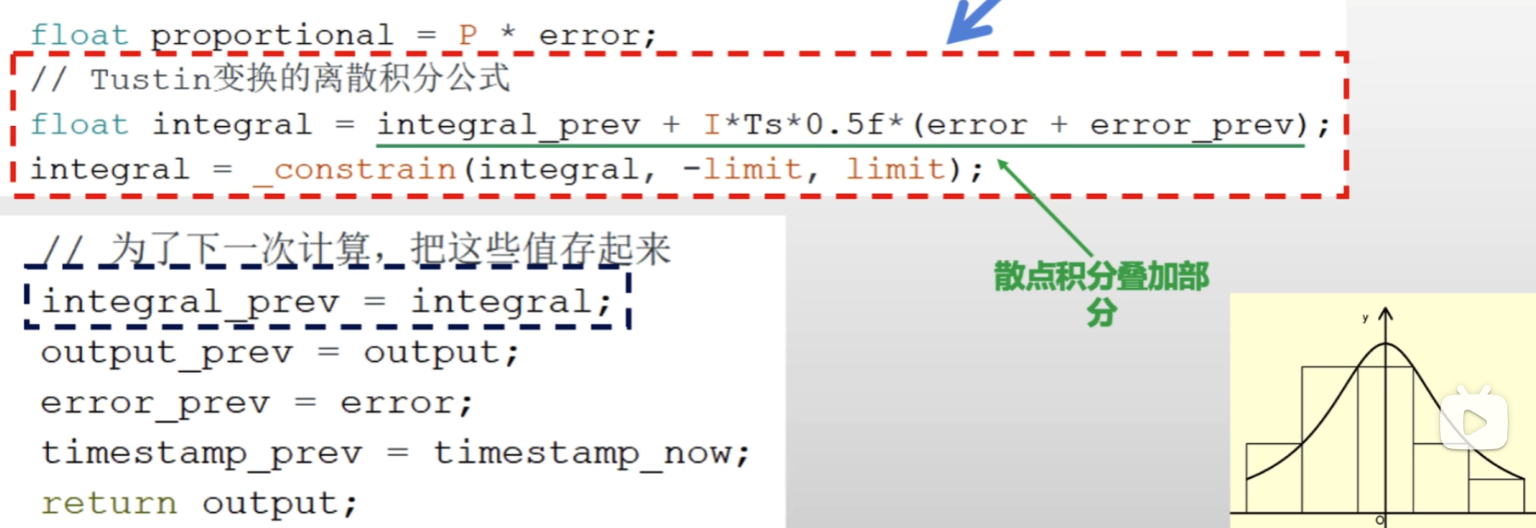
离散积分公式:前一时刻的积分+I系数*时间间隔*(误差+前一时刻误差)/2
由于ERROR和ERROR_PREV基本上不一样,那么就让它们平均得到这个积分(既四边形面积
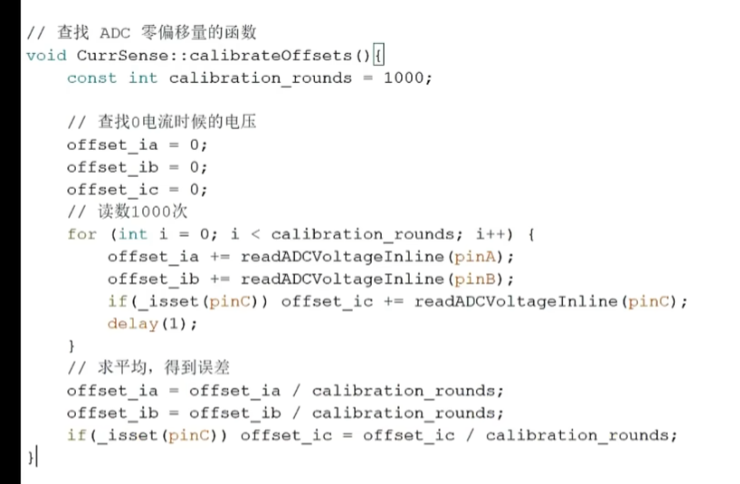
在0电流的时候循环1000次然后平均计算出来零飘

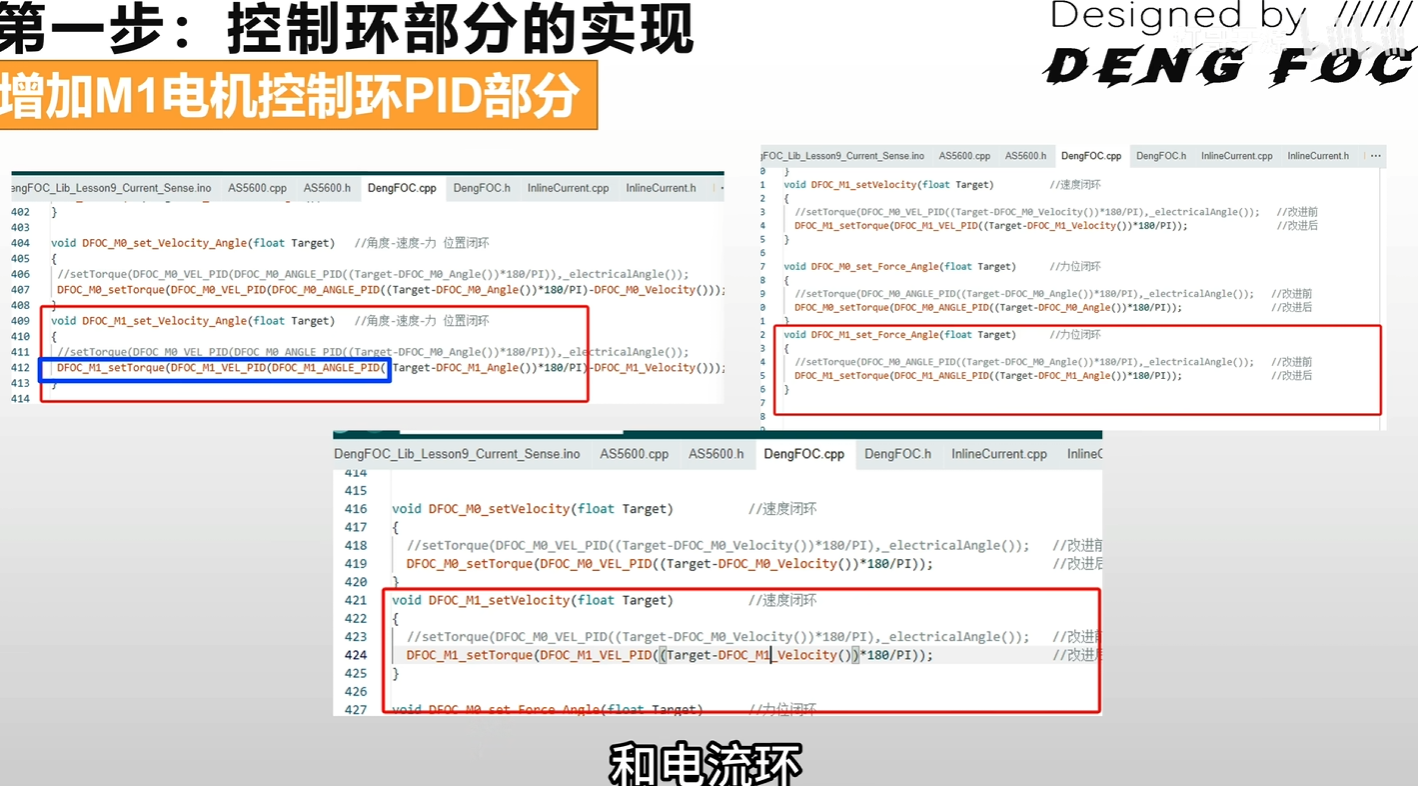
首先我们把这个角度PID输出值不是作为Uq直接输入给我们的FOC算法也不是作为lq像力位闭环那样,而是作为速度PID的期望值输入给速度的PID控制器,然而速度PID的输出值才当作电流环的力矩期望值,输入给电流环
也是在FOC算法和速度PID之间嵌套了一个电流环PID
总的来说
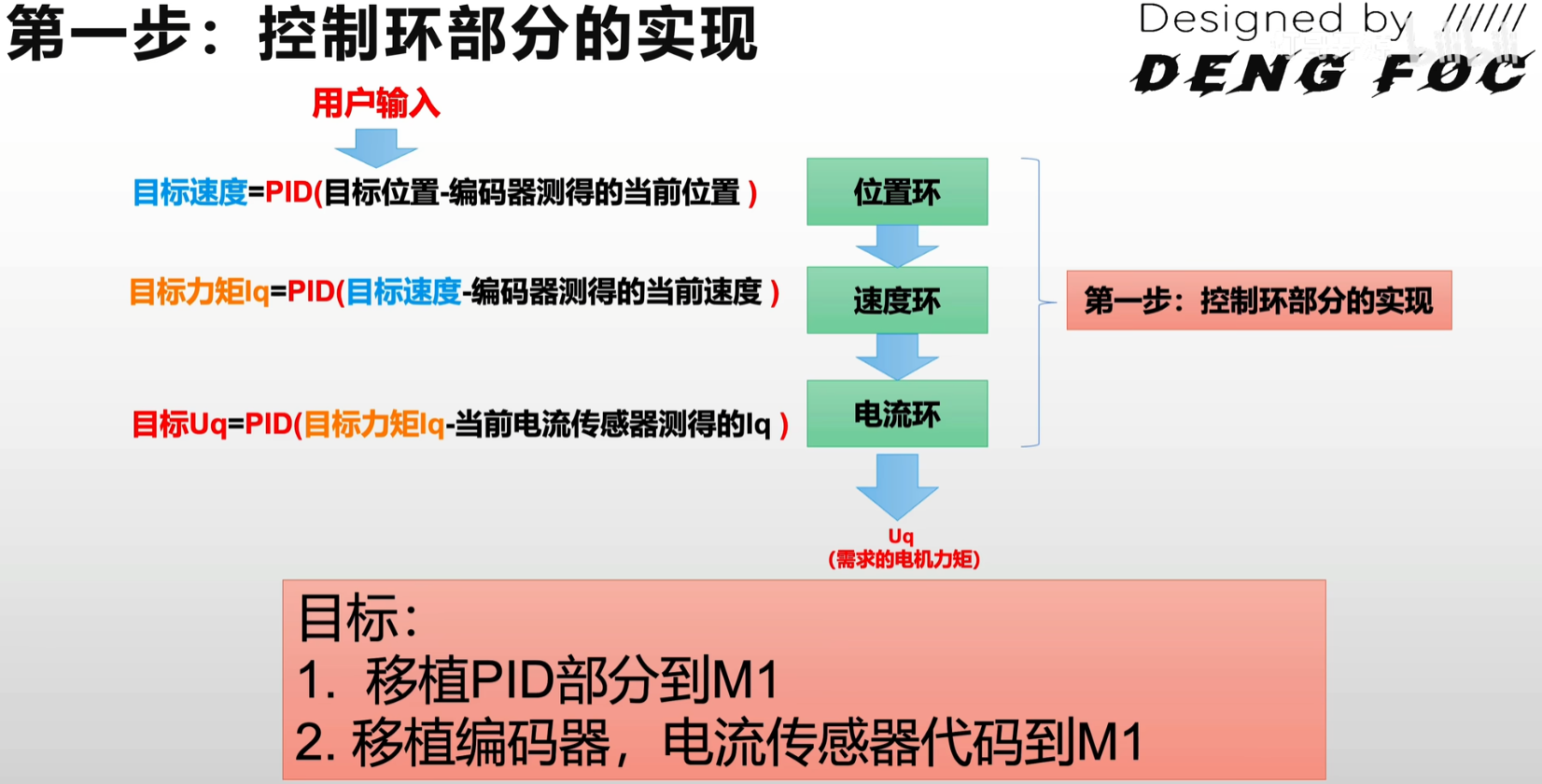
这三个环是一种嵌套关系
编码器
我们需要的是电角度
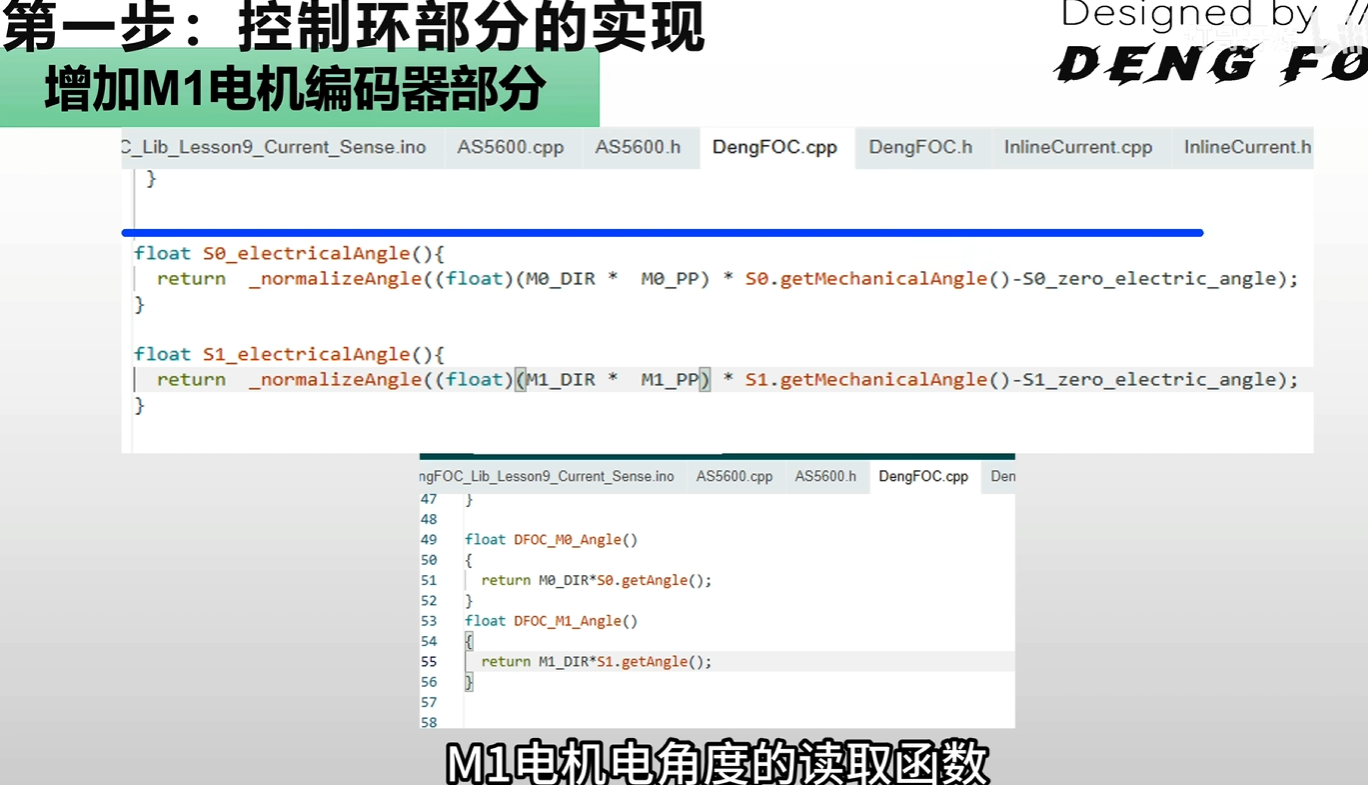
同时要考虑电角度,然后将编码器的方向乘进去
以U4和U6合成扇区内任意矢量
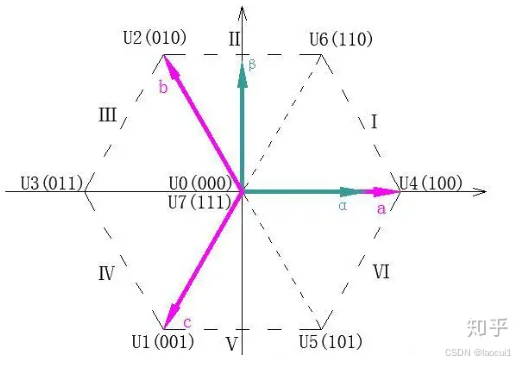
我们假设U6(1,1,0)
U4(U,0,0)
U4矢量通电做功的时间T1:
T1=T * DC *sin(60-α)
U6矢量通电做工时间T2:
T2=T * DC * sin(α)
T是控制时间的长短,对于单位周期,我们可以直接设置T=1
DC和前面课程提到的Uq相关,可以理解为想要的磁场强度
不做功的时间:T0=1-T1-T2

 浙公网安备 33010602011771号
浙公网安备 33010602011771号