基本矩阵F的构建
基本矩阵F在计算机视觉中是提纯匹配点、恢复相机位姿的一个法宝。其中C和C’分别代表左、右摄影中心,x和x’代表同名像点,e和e’代表极点。X是地物点,b 代表基线。
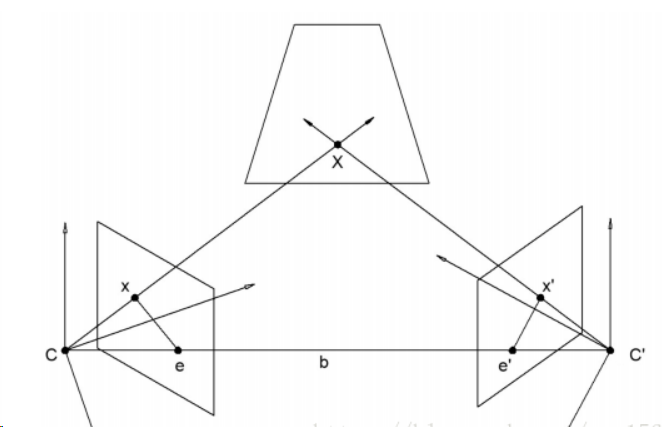
由世界坐标到图像坐标需要一个转换矩阵(这里假设C的相机矩阵为P,C'的为P'),具体生成方式参考:https://www.cnblogs.com/magicpig666/p/10593849.html
则x = PX,x' = P'X,联合则知:x’=P’P+ x,其中P+ 代表P的伪逆矩阵(P和P’都是3*4的矩阵),同理x = pp'+x';
右像的极点为:e’=P’C (可以理解为e'为C在C'上成的像),同理左像的极点 e = PC';
根据右极点和右像点可以确定其右极线:l' = e' * x' = P'C * P'P+ x 而向量的叉乘可以写成如下形式:
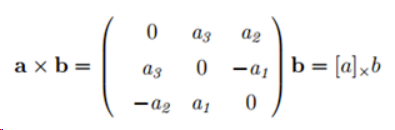
所以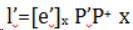 ,另基础矩阵为
,另基础矩阵为 ,则表明它是把左像上面的点x变换到了右像上的极线l'上去了,又称为极线约束。
,则表明它是把左像上面的点x变换到了右像上的极线l'上去了,又称为极线约束。
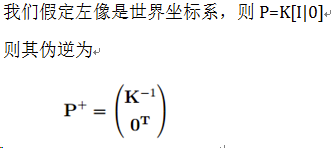 ,其中的k为内参矩阵,I为旋转矩阵,O为平移矩阵.
,其中的k为内参矩阵,I为旋转矩阵,O为平移矩阵.
参考:
https://blog.csdn.net/qq_15642411/article/details/80656466

 浙公网安备 33010602011771号
浙公网安备 33010602011771号