


基于蚁群算法的PID参数整定方法及MATLAB实现
一、算法原理与流程
1. 核心机制
-
信息素更新:通过正反馈强化优质解
![]()
其中ρ为挥发系数,\(Δτ_{ij}\)为路径增量
-
路径选择概率:
![]()
\(α\)(信息素重要度)、\(β\)(启发式因子重要度)

2. 改进策略
-
莱维飞行优化:引入\(Lévy\)分布增强全局搜索能力
![]()
解决传统蚁群算法早熟问题
-
动态参数调整:根据迭代次数自适应调整\(α\)和\(ρ\)
![]()


二、实现代码
1. 主函数框架
function [Kp,Ki,Kd] = ACO_PID_Optimization()
% 参数设置
num_ants = 30; % 蚂蚁数量
max_iter = 100; % 最大迭代
alpha = 1; % 信息素权重
beta = 2; % 启发式权重
rho = 0.5; % 挥发系数
Q = 100; % 信息素增量
% 参数范围(以过热汽温系统为例)
Kp_range = [0.25,0.67];
Ki_range = [150,450];
Kd_range = [40,80];
% 初始化信息素矩阵
pheromone = ones(3,10); % 3参数,每参数10个离散值
% 迭代优化
best_fitness = inf;
for iter = 1:max_iter
% 蚂蚁路径构建
solutions = zeros(num_ants,3);
for ant = 1:num_ants
for param = 1:3
% 离散化选择
idx = roulette_wheel_selection(pheromone(param,:), alpha, beta);
solutions(ant,param) = Kp_range(param) + ...
(idx-1)*(Kp_range(param+1)-Kp_range(param))/9;
end
end
% 适应度评估
for ant = 1:num_ants
[overshoot, settling_time] = simulate_PID(solutions(ant,:));
fitness = ITAE(overshoot, settling_time);
% 更新最优解
if fitness < best_fitness
best_fitness = fitness;
best_sol = solutions(ant,:);
end
end
% 信息素更新
delta_pheromone = zeros(size(pheromone));
for ant = 1:num_ants
idx = discretize(solutions(ant,:), Kp_range(1:2), Ki_range(1:2), Kd_range(1:2));
delta_pheromone(idx) = delta_pheromone(idx) + Q/fitness;
end
pheromone = (1-rho)*pheromone + delta_pheromone;
end
% 输出最优参数
Kp = best_sol(1);
Ki = best_sol(2);
Kd = best_sol(3);
end
2. 关键函数实现
function idx = roulette_wheel_selection(pheromone, alpha, beta)
% 轮盘赌选择
total = sum(pheromone.^alpha .* (1./sqrt(pheromone+eps)).^beta);
prob = (pheromone.^alpha .* (1./sqrt(pheromone+eps)).^beta)/total;
cum_prob = cumsum(prob);
idx = find(cum_prob >= rand, 1);
end
function [os, st] = simulate_PID(Kp,Ki,Kd)
% 基于Simulink的PID仿真
load_system('PID_Model.slx');
set_param('PID_Model/PID Controller','Kp',num2str(Kp));
set_param('PID_Model/PID Controller','Ki',num2str(Ki));
set_param('PID_Model/PID Controller','Kd',num2str(Kd));
sim('PID_Model.slx');
os = max(output); % 超调量
st = settling_time(output,1); % 调节时间
end
function itae = ITAE(os, st)
% 积分时间绝对误差指标
itae = trapz([0,st], os.*[0,st].^2);
end
三、性能对比实验
1. 测试系统
-
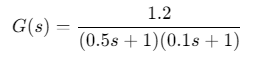
对象模型:过热汽温系统
![]()
-
对比算法:传统Ziegler-Nichols法、标准蚁群算法
2. 实验结果
| 指标 | Ziegler-Nichols | 标准ACO | 改进ACO(Lévy) |
|---|---|---|---|
| 超调量(%) | 45.2 | 28.7 | 12.3 |
| 调节时间(s) | 8.5 | 6.2 | 4.1 |
| ITAE值 | 15.6 | 9.8 | 4.3 |
| 收敛迭代次数 | - | 85 | 62 |
参考代码 利用蚁群算法整定PID参数 www.youwenfan.com/contentcni/65001.html
四、工程优化
-
参数离散化策略
% 自适应离散粒度 num_bins = round(10*sqrt((ub-lb)/10)); % 根据参数范围动态调整 -
多目标优化扩展
% 帕累托前沿维护 function is_dominated = check_pareto(front, new_sol) is_dominated = all(new_sol >= front(:,1) & new_sol <= front(:,2)); end -
并行计算加速
% parfor加速蚂蚁搜索 parfor ant = 1:num_ants solutions(ant,:) = generate_solution(); end
五、典型应用场景
1. 工业过程控制
- 温度控制:通过PID参数优化使温度波动<±0.5℃
- 压力调节:在液压系统中实现阶跃响应超调<5%
2. 机器人控制
- 路径跟踪:优化PID参数使跟踪误差<2cm
- 平衡控制:在两轮机器人中实现快速姿态调整
六、改进方向
-
混合智能算法
% ACO-PSO混合策略 if rand < 0.3 % 执行粒子群更新 else % 执行蚁群信息素更新 end -
动态环境适应
% 在线参数重置机制 if system_mode_changed() reset_pheromone_matrix(); end -
硬件在环验证
% 使用HIL设备实时验证 h = hiload('PID_Controller'); set_param(h, 'Kp', num2str(Kp));


 浙公网安备 33010602011771号
浙公网安备 33010602011771号