【Ray Tracing in One Weekend 超详解】 光线追踪1-9 景深
今天我们来学最后一章
Chapter11:Defocus Blur
Preface
散焦模糊 也称 景深
首先,我们来了解一下散焦模糊,我们在真实相机中散焦模糊的原因是因为它们需要一个大圈(而不仅仅是一个针孔)来聚光。这会使所有东西都散焦,但是如果用小孔的话,那么通过前后调整相机镜头,就会使得一切景色都会聚焦到相机镜头中,也就是会汇聚到那个孔内。物体聚焦的那个平面的距离由镜头和胶片/传感器之间的距离控制。这就是为什么当你改变焦点时可以看到镜头相对于相机移动的原因。
光圈是一个可以有效控制镜头大小的孔。对于真正的相机,如果你需要更多光线,你可以使光圈更大,同时也会获得更多的散焦模糊。对于我们的虚拟相机,我们也需要一个光圈
真正的相机具有复杂的复合镜头。对于我们的代码,我们可以模拟顺序:传感器,然后是镜头,然后是光圈,并找出发送光线的位置并在计算后翻转图像(图像在胶片上倒置投影)。人们通常使用薄透镜模拟近似。
引用书上一张图(相机聚焦成像)
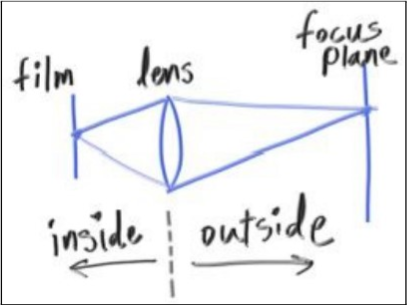
我们不需要这么复杂,我们通常从镜头表面开始射线,并将它们发送到虚拟胶片平面,方法是找到胶片在焦点平面上的投影(在距离focus_dist处)。
正文
前面说了一大堆,看着比较复杂,其实并没有那么难
前言说了三件事情:
第一点,生活中的相机成像分为两个部分,inside和outside,涉及3个物:film(胶片)、lens(镜片)、focusPlane(焦点平面),而我们只需要outside部分
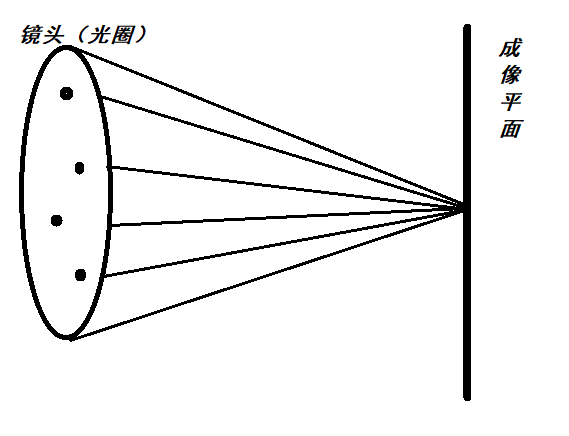
其次第二点,我们的眼睛(或者相机)不再是一个点而是眼睛所在的周围圆盘上的随机点,因为实际的相机是有摄像镜头的,摄像镜头是一个大光圈(很大一个镜片),并不是针孔类的东东,所以,我们要模拟镜头,就要随机采针孔周围的光圈点。
可能有人不明白这里,可以回去看看1-3
看一下这张图
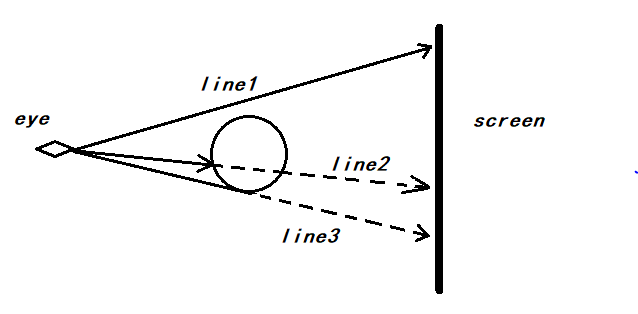
这是之前我们讲的光线追踪的成像过程,从eye开始发射视线,这个扫描屏幕中的每个点,如果中间被物体遮挡,那么计算,计算之后的像素值为屏幕上该点的像素值,如果没有遮挡,那么屏幕上那个点的像素值就是背景对应的值
我们这里只不过是把eye变为周围单位圈内的随机点,仅此模拟实际相机镜头
第三点,这个应该是上一章节提到的问题:
上一章节我们说了,为了方便,上一章节假定成像平面位于z = -1(或者是-w平面,按w基向量算)
所以 tan(theta/2) = (h/2) / dis ,其中dis为1
而这一章,我们使dis真正变成了一个变量,即:焦距(镜片到成像平面之间的距离)
(图片来自百度百科: )
)
随之,我们的成像平面也就到了z = -focus,或者是-focus * w平面(按w基向量算)
所以,构造函数,我们就需要加两个参数,改两行行即可
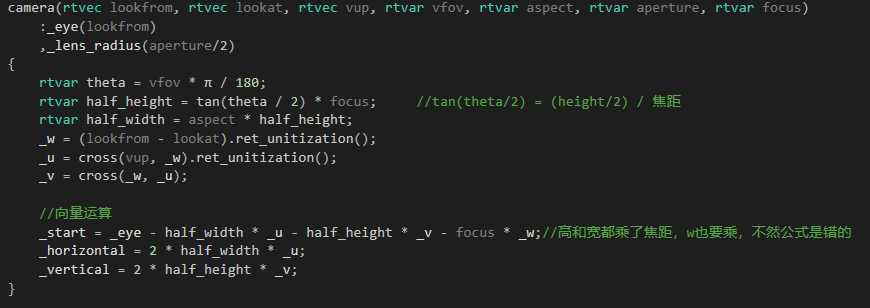
还有就是单位圆盘取随机点函数
const rtvec random_unit_disk() //find a random point in unit_disk { rtvec p; do { p = 2.0*rtvec(rtrand01(), rtrand01(), 0) - rtvec(1, 1, 0); } while (dot(p, p) >= 1.0); return p; }
下面是所有的camera类


/// camera.h // ----------------------------------------------------- // [author] lv // [begin ] 2019.1 // [brief ] the camera-class for the ray-tracing project // from the 《ray tracing in one week》 // ----------------------------------------------------- #ifndef CAMERA_H #define CAMERA_H #include "ray.h" namespace rt { class camera { public: camera(rtvec lookfrom, rtvec lookat, rtvec vup, rtvar vfov, rtvar aspect, rtvar aperture, rtvar focus) :_eye(lookfrom) ,_lens_radius(aperture/2) { rtvar theta = vfov * π / 180; rtvar half_height = tan(theta / 2) * focus; //tan(theta/2) = (height/2) / 焦距 rtvar half_width = aspect * half_height; _w = (lookfrom - lookat).ret_unitization(); _u = cross(vup, _w).ret_unitization(); _v = cross(_w, _u); //向量运算 _start = _eye - half_width * _u - half_height * _v - focus * _w;//高和宽都乘了焦距,w也要乘,不然公式是错的 _horizontal = 2 * half_width * _u; _vertical = 2 * half_height * _v; } inline const ray get_ray(const rtvar u,const rtvar v)const { rtvec rd = _lens_radius * random_unit_disk(); rtvec offset = _u * rd.x() + _v * rd.y(); return ray{ _eye + offset, _start + u*_horizontal + v*_vertical - (_eye + offset) }; } inline const ray get_ray(const lvgm::vec2<rtvar>& para)const { return get_ray(para.u(), para.v()); } inline const rtvec& eye()const { return _eye; } inline const rtvec& start()const { return _start; } inline const rtvec& horizontal()const { return _horizontal; } inline const rtvec& vertical()const { return _vertical; } inline const rtvec& u()const { return _u; } inline const rtvec& v()const { return _v; } inline const rtvec& w()const { return _w; } inline const rtvar lens_r()const { return _lens_radius; } private: rtvec _u; rtvec _v; rtvec _w; rtvec _eye; rtvec _start; //left-bottom rtvec _horizontal; rtvec _vertical; rtvar _lens_radius; //the radius of lens }; } #endif
所以,我们用上一章的球体设置,把相机改一下,渲染一把
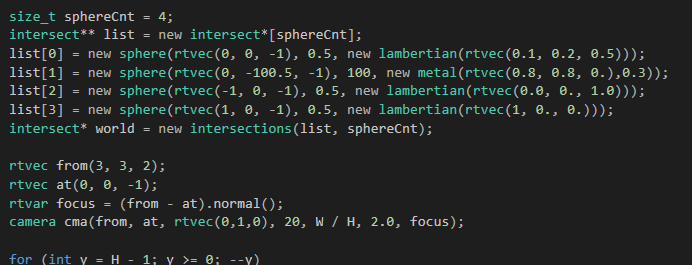
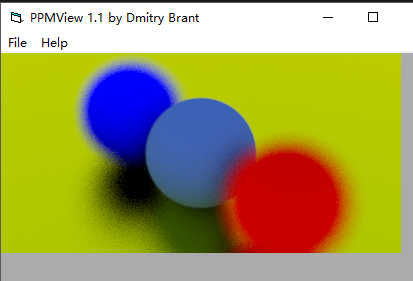
渲染效果就是开篇那张图
晚安

 浙公网安备 33010602011771号
浙公网安备 33010602011771号