随笔分类 - ROS2
ROS2相关内容
摘要: Turtlebot 3仿真导航...
阅读全文
Turtlebot 3仿真导航...
阅读全文
Turtlebot 3仿真导航...
阅读全文
摘要:Nav 2简介...
阅读全文
Nav 2简介...
阅读全文
摘要:ros2 编写动作服务器和客户端...
阅读全文
ros2 编写动作服务器和客户端...
阅读全文
摘要:ros2 自定义动作文件...
阅读全文
ros2 自定义动作文件...
阅读全文
摘要:学会使用ros2 doctor...
阅读全文
学会使用ros2 doctor...
阅读全文
摘要:ROS2配置节点参数...
阅读全文
ROS2配置节点参数...
阅读全文
摘要:ROS2在一个包内自定义消息类型...
阅读全文
ROS2在一个包内自定义消息类型...
阅读全文
摘要:ROS2自定义消息类型...
阅读全文
ROS2自定义消息类型...
阅读全文
摘要:ROS2服务/客服通信...
阅读全文
ROS2服务/客服通信...
阅读全文
摘要: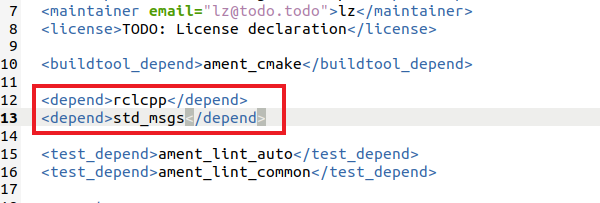 使用C++编写发布者和订阅者...
阅读全文
使用C++编写发布者和订阅者...
阅读全文
使用C++编写发布者和订阅者...
阅读全文
摘要: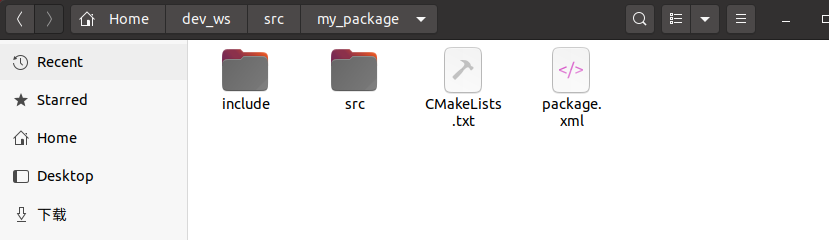 创建ROS2功能包...
阅读全文
创建ROS2功能包...
阅读全文
创建ROS2功能包...
阅读全文
 如何创建工作空间...
如何创建工作空间...
摘要: 学会使用bag工具...
阅读全文
学会使用bag工具...
阅读全文
学会使用bag工具...
阅读全文
摘要: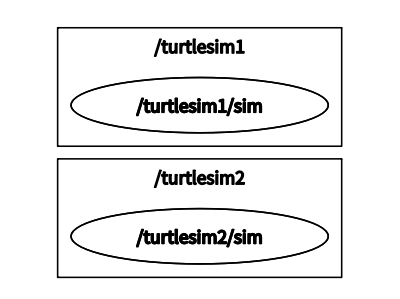 建立一个launch文件...
阅读全文
建立一个launch文件...
阅读全文
建立一个launch文件...
阅读全文
摘要:学会使用rqt_console...
阅读全文
学会使用rqt_console...
阅读全文
摘要: ROS2中的动作服务器...
阅读全文
ROS2中的动作服务器...
阅读全文
ROS2中的动作服务器...
阅读全文
摘要: ROS2中的参数...
阅读全文
ROS2中的参数...
阅读全文
ROS2中的参数...
阅读全文
摘要: ROS2中的服务
阅读全文
ROS2中的服务
阅读全文
ROS2中的服务
阅读全文
摘要: ROS2中的话题...
阅读全文
ROS2中的话题...
阅读全文
ROS2中的话题...
阅读全文
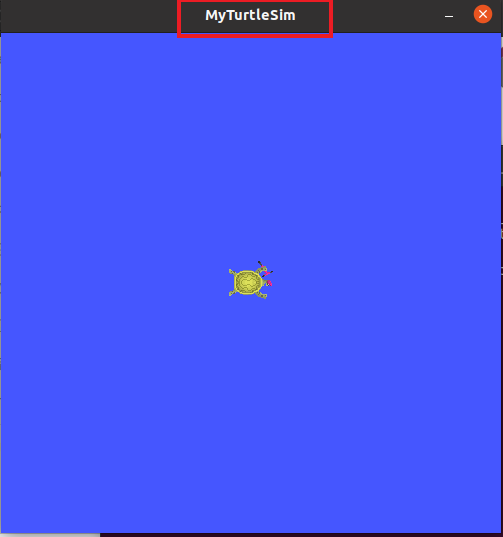
摘要: ROS2中的节点...
阅读全文
ROS2中的节点...
阅读全文
ROS2中的节点...
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号