

ROS2之服务
ROS2 的服务(Service)
-
概念:
服务是一种 请求-响应(request-response)通信机制,由 客户端(Client) 和 服务端(Server) 两部分组成。 -
通信模式:
-
客户端 发送一个请求(Request)。
-
服务端 处理请求,并返回响应(Response)。
-
一问一答,适合短时操作。
-
-
特点:
-
一对一通信,不像话题那样是一对多。
-
请求和响应的数据类型是 固定定义好的
.srv文件(里面有请求字段和响应字段)。 -
适合执行需要确认结果的操作。
-
-
典型应用场景:
-
查询机器人位置。
-
控制执行某个单次动作(例如开关灯、拍照)。
-
获取传感器的单次读数。
-
服务的本质是通过两个交互的话题实现的,当你创建一个服务时,系统会自动生成两个隐藏的话题:
-
请求话题(Request Topic)
-
客户端(Client)通过这个话题向服务端(Server)发送请求消息。
-
-
响应话题(Response Topic)
-
服务端(Server)通过这个话题把处理结果返回给客户端。
-
一个服务 = 请求话题 + 响应话题。
一般来说客户端节点会向请求话题发布消息,然后从响应话题得到消息,同理服务端向响应话题发布消息,从请求话题得到消息,二者的对于不同的话题交互都是单向的,保证了一个负责请求,一个负责响应。

基于服务的参数通信
参数通信
-
在 ROS2 中,参数(Parameter) 是节点的配置项,用来控制节点的行为。
例如:-
turtlesim_node的背景颜色 -
激光雷达的刷新频率
-
控制器的 PID 系数
-
-
参数通信 指的是:节点之间通过 服务机制(Service) 来 设置、修改、查询参数。
ROS2 参数通信的特点
-
一对一的服务通信
-
参数操作是请求-响应模式(类似打电话)。
-
客户端(如
ros2 param命令)发送请求,服务端(节点)返回结果。
-
-
内置服务接口
ROS2 每个支持参数的节点都会自动提供一些参数相关的服务:-
/node_name/get_parameters获取参数值 -
/node_name/set_parameters设置参数值 -
/node_name/list_parameters列出参数 -
/node_name/describe_parameters获取参数描述(类型、范围等)
-
-
接口类型定义
所有参数相关的服务接口都在rcl_interfaces包中定义,比如:-
rcl_interfaces/srv/GetParameters -
rcl_interfaces/srv/SetParameters
-
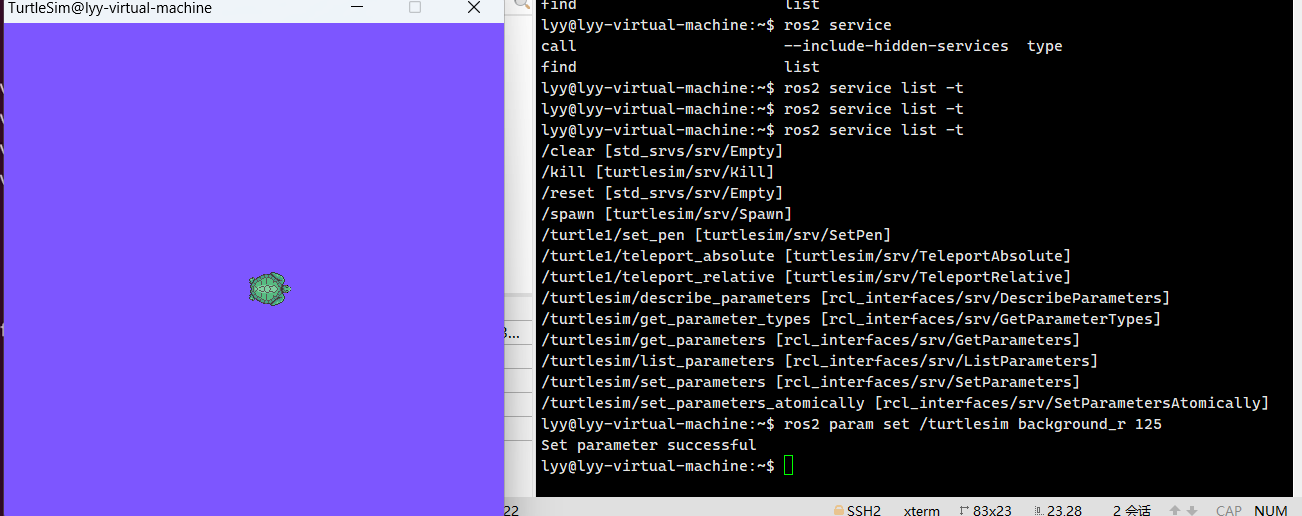
通过参数通信调节设置小海龟的背景颜色,在 ROS2 中,也可以通过 YAML 配置文件提前写好参数,然后在启动节点时加载,让节点自动带着这些参数运行。
话题消息接口为功能包下的msg下的.msg文件,而服务消息接口为srv下的.srv文件
服务接口一般形式靠---分割
# 请求部分(Request)
<请求字段类型> <请求字段名称>
<请求字段类型> <请求字段名称>
...---
# 响应部分(Response)
<响应字段类型> <响应字段名称>
<响应字段类型> <响应字段名称>
...
ROS2 接口命名规范对照表
| 类型 | 正确示例 ✅ | 错误示例 ❌ | 说明 |
|---|---|---|---|
| 包名 (package) | face_interfaces |
FaceInterfaces, face-interfaces, faceInterfaces |
必须小写,下划线分隔,不允许大写或 - |
| 消息文件 (.msg) | Person.msg, FaceData.msg, RobotStatus.msg |
person.msg, face_data.msg, Face_data.msg |
文件名 PascalCase,首字母大写,不能用下划线 |
| 服务文件 (.srv) | GetFaceInfo.srv, AddTwoInts.srv |
get_face_info.srv, add_two_ints.srv |
文件名 PascalCase,系统会生成 _Request 和 _Response |
| 动作文件 (.action) | Navigate.action, TrackFace.action |
track_face.action, Navigate_Action.action |
文件名 PascalCase,系统会生成 _Goal、_Result、_Feedback |
| 消息/服务/动作字段 (内部) | string name, int32 age, geometry_msgs/Point position |
string Name, int Age, float positionX |
字段名必须 小写+下划线,类型用 ROS 标准类型 |
| 生成的类型名 (自动生成) | GetFaceInfo_Request, GetFaceInfo_ResponseNavigate_Goal, Navigate_Result, Navigate_Feedback |
get_face_info_Request, face_interfaces_Request |
自动生成的类型名也遵循 PascalCase,错误一般来自文件命名不规范 |
PascalCase:PascalCase 是一种命名方式,规则是 每个单词的首字母大写且不使用下划线或空格,例如:GetFaceInfo、PersonMsg。
ROS2中的客户端和服务端访问同一个服务名称,客户端的操作一般是构造出一个定时器将请求服务包装为一个回调函数然后设置阻塞时间,防止等待服务过程中长时间占用cpu,然后构建请求当服务可用时,这时我们异步发送请求并绑定一个请求回调函数,其回调函数的参数为rclcpp::Client<服务消息接口>::SharedFuture,此时为一个未来数据展位符,当响应返回时触发,用get获取响应,但是get是单次的禁止重复get,因为每次的服务只会有对应一个响应,而服务端绑定的回调函数有两个参数分别为服务消息接口::Request::SharedPtr和服务消息接口::Response::SharedPtr,需要的操作就是获取请求并给响应进行赋值,这样服务就完成了。
Python实现人脸检测服务
该人脸检测服务由客户端上传人脸图片,发送给服务端,客户端启动之后会等待服务端的启动才能进行正常的服务,否则处于休眠状态,防止占用过多cpu,然服务端响应回人脸个数,用时和每个框的四个点的位置信息给客户端进行展示
首先我们需要创建一个工作控件service_example同时创建src文件夹用于存放功能包
创建服务接口,用于客户端和服务端交互数据,所需依赖除了解析消息接口的依赖还需要sensor_msgs用于传递人脸图片,注意消息接口的功能包需要用到C++的CMakeLists.txt文件进行构建
# 人脸图像
sensor_msgs/Image image
---
# 人脸个数
int16 number
# 识别耗时
float32 use_time
# 人脸框的四个点
int32[] top
int32[] right
int32[] bottom
int32[] left
在CMakeLists.txt文件加上对应的转换函数
rosidl_generate_interfaces(${PROJECT_NAME}
"srv/FaceInterfaces.srv"
DEPENDENCIES sensor_msgs
)
构建得到相应的服务接口
创建客户服务端功能包,里面创建两个节点,一个客户端节点,一个服务端节点
import rclpy
from rclpy.node import Node
from face_interfaces.srv import FaceInterfaces
import face_recognition
import cv2
from ament_index_python.packages import get_package_share_directory
import os
from cv_bridge import CvBridge
import time
class FaceDetectClientNode(Node):
def __init__(self):
super().__init__('face_detect_client_node')
# 用于 OpenCV 图像 ↔ ROS 图像消息的转换,因为ROS接口里面的图像类型和OpenCV的图像类型并不相同
self.bridge = CvBridge()
self.client = self.create_client(FaceInterfaces,'face_detect')
self.get_logger().info('face detect client start')
# 获取照片的绝对路径
self.face_image_path = os.path.join(get_package_share_directory('demo_python_service'),'resource/face.jpg')
self.image = cv2.imread(self.face_image_path)
#等待服务启动->构建请求->异步发送请求不堵塞线程->future作为容器存放响应此时为空->当获取响应时自动调用回调函数然后将响应存入future
def send_request(self):
# 每搁一秒询问服务死否启动,否则等待
while self.client.wait_for_service(timeout_sec = 1.0) is False:
self.get_logger().info('wait service start')
# 获取服务接口的请求数据结构
request = FaceInterfaces.Request()
# 图像结构转换
request.image =self.bridge.cv2_to_imgmsg(self.image)
# 异步发送请求,返回一个未来的响应,不能直接用它的值,但可以给它加回调函数,当结果返回时就会触发
future=self.client.call_async(request)
# 回调函数,响应时触发
future.add_done_callback(self.result_callback)
def result_callback(self,future):
response =future.result()
self.get_logger().info(f'face number :{response.number},use time : {response.use_time}')
self.show_response(response)
def show_response(self,response):
# 为每个人脸描绘出边框
for i in range(response.number):
top=response.top[i]
right =response.right[i]
bottom= response.bottom[i]
left=response.left[i]
cv2.rectangle(self.image,(left,top),(right,bottom),(255,0,0),4)
cv2.imshow('Face Detecte Result',self.image)
cv2.waitKey(0)
def main():
rclpy.init()
node = FaceDetectClientNode()
node.send_request()
rclpy.spin(node)
rclpy.shutdown()import rclpy
from rclpy.node import Node
from face_interfaces.srv import FaceInterfaces
import face_recognition
import cv2
from ament_index_python.packages import get_package_share_directory
import os
from cv_bridge import CvBridge
import time
class FaceDetectServiceNode(Node):
def __init__(self):
super().__init__('face_detect_service_node')
#创建了一个服务
self.service = self.create_service(FaceInterfaces,'face_detect',self.face_detect_callback)
self.bridge = CvBridge()
# 人脸检测模型的参数
self.number_of_times_to_upsampl = 1
self.model = 'hog'
self.face_image_path = os.path.join(get_package_share_directory('demo_python_service'),'resource/face.jpg')
self.get_logger().info('face detect service start')
def face_detect_callback(self,request,response):
# 判断客户端给的图像是否为空
if request.image.data:
cv_image= self.bridge.imgmsg_to_cv2(request.image)
self.get_logger().warn('image is null,use defacult')
else:
cv_image = cv2.imread(self.face_image_path)
self.get_logger().info('image is finishing')
# 记录开始检测的时间
start_time = time.time()
face_locations = face_recognition.face_locations(cv_image,number_of_times_to_upsample=self.number_of_times_to_upsampl,model=self.model)
# 计算时间差
response.use_time = time.time() - start_time
# 数据赋值
response.number = len(face_locations)
for top,right,bottom,left in face_locations:
response.top.append(top)
response.right.append(right)
response.bottom.append(bottom)
response.left.append(left)
return response
def main():
rclpy.init()
node = FaceDetectServiceNode()
rclpy.spin(node)
rclpy.shutdown()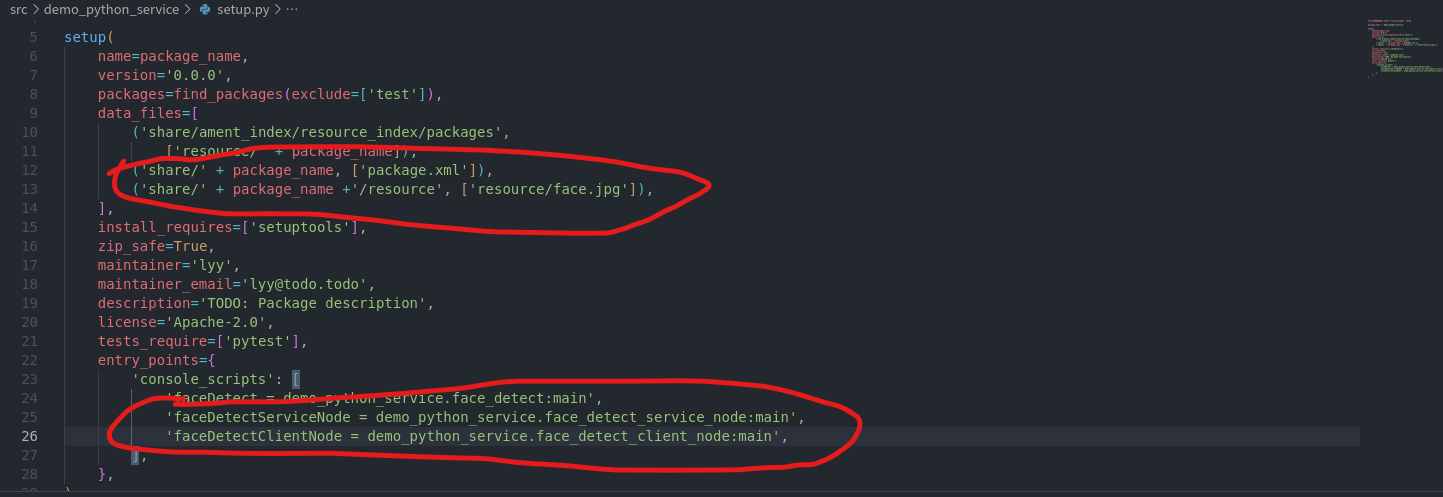

C++实现海龟巡逻服务
客户端随机生成一些目标点,让海龟去巡逻,服务端接收到这些目标点控制海龟去这些目标点,我们直接使用之前学习话题的代码进行控制
服务接口结构
float32 target_x
float32 target_y
---
int8 SUCESS=1
int8 FAIL=0
int8 result #结果,SUCESS/│FAIL取其一
创建服务端和客户端
在 ROS 2 中,定时器(create_wall_timer)的核心价值是让周期性任务融入节点的 “事件循环”,既保证任务能按周期执行,又不阻塞节点处理其他关键事件(如服务响应、订阅消息等),
定时器的本质是ROS 2 事件驱动模型下的 “周期性任务调度器”
ROS2中关于多线程的问题,客户端一般需要等待服务的启动否则将进入阻塞状态,阻塞主线程,周期性检测如果ROS上下文异常就退出避免一直检测,当定时器回调执行时间超过周期时,下一个回调会进入事件队列等待,直到当前回调结束后再执行,不会并行触发,一直到服务端启动才处理后面的事件,异步请求避免一直阻塞等待响应。
#include <rclcpp/rclcpp.hpp>
#include <turtlesim/msg/pose.hpp>
#include <geometry_msgs/msg/twist.hpp>
#include <partol_interfaces/srv/partol.hpp>
using namespace std;
using namespace rclcpp;
using Partol = partol_interfaces::srv::Partol;
class TurtleClientNode:public Node
{
private:
Client<Partol>::SharedPtr partol_client;
TimerBase::SharedPtr timer;
public:
explicit TurtleClientNode(const string& node_name):Node(node_name){
partol_client = this->create_client<Partol>("partol");
// 随机数种子
srand(time(NULL));
// 注册到事件队列中,当10s周期到时再触发一次,但是事件的处理必须等待执行器占据主线程才会进行,如果没有定时器直接执行的话会一直阻塞线程,执行器无法获取主线程
//创建一个 10 秒周期的定时器,每次定时器触发时,先检查服务是否可用,如果服务端还没启动,循环等待,如果整个 ROS2 系统关闭了,就报错退出
timer = this->create_wall_timer(10s,[&]()->void{
// 在 wait_for_service(1s) 阻塞的 1 秒内,节点无法处理任何其他事件,当前节点的主线程被阻塞,无法处理自己的事件队列。
while(!this->partol_client->wait_for_service(1s)){
if(!rclcpp::ok()){
RCLCPP_ERROR(this->get_logger(),"wait service,rclcpp is over");
return;
}
RCLCPP_INFO(this->get_logger(),"wait service.........");
}
// 随机生成目标地点坐标
auto request = std::make_shared<Partol::Request>();
request->set__target_x(rand()%15);
request->set__target_y(rand()%15);
RCLCPP_INFO(this->get_logger(),"create target point(%f,%f)",request->target_x,request->target_y);
// 异步请求,这样不需要一直等待响应而什么都不干,可以在等待响应的过程中进行其他操作
// 发送请求不阻塞当前线程,响应回调在执行器线程中执行,此时会注册一个事件当回调触发时执行
this->partol_client->async_send_request(request,[&](Client<Partol>::SharedFuture future)->void{
auto response = future.get();
if(response->result == Partol::Response::SUCESS){
RCLCPP_INFO(this->get_logger(),"turtle is success");
}
else{
RCLCPP_ERROR(this->get_logger(),"turtle is fail");
}
});
});
}
};
int main(int argc,char** argv){
init(argc,argv);
auto node = make_shared<TurtleClientNode>("turtle_client");
RCLCPP_INFO(node->get_logger(),"turtle_client start");
spin(node);
shutdown();
return 0;
}#include <rclcpp/rclcpp.hpp>
#include <turtlesim/msg/pose.hpp>
#include <geometry_msgs/msg/twist.hpp>
#include <partol_interfaces/srv/partol.hpp>
using namespace std;
using namespace rclcpp;
using Partol = partol_interfaces::srv::Partol;
class TurtleServiceNode:public Node
{
private:
Service<Partol>::SharedPtr service;
Publisher<geometry_msgs::msg::Twist>::SharedPtr publisher;
Subscription<turtlesim::msg::Pose>::SharedPtr subsciber;
double target_x {1.0};
double target_y {1.0};
double k {1.0};
double max_speed {3.0};
public:
explicit TurtleServiceNode(const string& node_name):Node(node_name){
service = this->create_service<Partol>("partol",[&](const Partol::Request::SharedPtr request,Partol::Response::SharedPtr response) -> void{
if(
(request->target_x>0 && request->target_x<12.0f)&&
(request->target_y>0 && request->target_y<12.0f)
){
this->target_x = request->target_x;
this->target_y = request->target_y;
response->result = Partol::Response::SUCESS;
}
else{
response->result = Partol::Response::FAIL;
}
});
publisher = this->create_publisher<geometry_msgs::msg::Twist>("/turtle1/cmd_vel", 10);
subsciber = this->create_subscription<turtlesim::msg::Pose>("/turtle1/pose", 10,bind(&TurtleServiceNode::pose_callback,this,placeholders::_1));
}
void pose_callback(const turtlesim::msg::Pose::SharedPtr pose){
auto current_x = pose->x;
auto current_y = pose->y;
RCLCPP_INFO(this->get_logger(),"x=%f y=%f \n",current_x,current_y);
auto distance = sqrt((target_x-current_x)*(target_x-current_x)+(target_y-current_y)*(target_y-current_y));
auto angle = atan2((target_y-current_y),(target_x-current_x)) - pose->theta;
auto msg = geometry_msgs::msg::Twist();
if(distance>0.1){
if(fabs(angle)>0.2){
msg.angular.z = fabs(angle);
}else{
msg.linear.x = k*distance;
}
}
if(msg.linear.x > max_speed){
msg.linear.x = max_speed;
}
publisher->publish(msg);
}
};
int main(int argc,char** argv){
init(argc,argv);
auto node = make_shared<TurtleServiceNode>("turtle_service");
RCLCPP_INFO(node->get_logger(),"turtle_service start");
spin(node);
shutdown();
return 0;
}cmake_minimum_required(VERSION 3.8)
project(demo_cpp_service)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(partol_interfaces REQUIRED)
find_package(rclcpp REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(turtlesim REQUIRED)
add_executable(turtleService src/turtle_service.cpp)
add_executable(turtleClient src/turtle_client.cpp)
ament_target_dependencies(turtleService partol_interfaces rclcpp geometry_msgs turtlesim)
ament_target_dependencies(turtleClient partol_interfaces rclcpp geometry_msgs turtlesim)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
install(TARGETS turtleService turtleClient
DESTINATION lib/${PROJECT_NAME}
)
ament_package()先启动海龟模拟强,再启动客户端,然后启动服务端

自己写的一个c++服务案例,客户端给出用户名和年龄,加上时间节点,然后服务端生成一个特定的序列号
builtin_interfaces/Time stamp
string user_name
int32 age
---
string sequence#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <demo_cpp_test/srv/my_service.hpp>
#include <builtin_interfaces/msg/time.hpp>
#include <functional>
using MyService = demo_cpp_test::srv::MyService;
class ServiceNode:public rclcpp::Node{
public:
explicit ServiceNode(const std::string &node_name):rclcpp::Node(node_name){
RCLCPP_INFO(this->get_logger(),"用户序列生成服务启动");
// 不同于话题的消息接口,对于服务的消息接口分为请求和相应两部分,其回调函数需要接收两个参数,在客户和服务话题中这两部分传送的方向是完全相反的
service = this -> create_service<MyService>("service_topic",std::bind(&ServiceNode::generateSequence,this,std::placeholders::_1,std::placeholders::_2));
}
// 此时受到来自客户端的请求,并对此作出响应返回给客户端
void generateSequence(const MyService::Request::SharedPtr req,MyService::Response::SharedPtr rep){
auto stamp = req -> stamp;
auto user_name = req -> user_name;
auto age = req -> age;
std::stringstream ss;
ss << "USER_" << user_name << "_AGE_" << age << "_TS_" << stamp.sec << "_" << stamp.nanosec;
rep -> sequence = ss.str();
RCLCPP_INFO(this->get_logger(),"生成序列号为%s",ss.str().c_str());
}
private:
rclcpp::Service<MyService>::SharedPtr service;
};
int main(int argc,char** argv){
rclcpp::init(argc,argv);
rclcpp::spin(std::make_shared<ServiceNode>("service_node"));
rclcpp::shutdown();
}#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <demo_cpp_test/srv/my_service.hpp>
#include <builtin_interfaces/msg/time.hpp>
#include <functional>
#include <chrono>
using MyService = demo_cpp_test::srv::MyService;
using namespace std::chrono_literals;
class ClientTwoNode:public rclcpp::Node{
public:
explicit ClientTwoNode(const std::string &node_name):Node(node_name){
RCLCPP_INFO(this->get_logger(),"客户端clinet_node2启动");
srand(time(NULL));
client = this -> create_client<demo_cpp_test::srv::MyService>("service_topic");
timer = this -> create_wall_timer(10s,std::bind(&ClientTwoNode::resigerUsername,this));
}
void resigerUsername(){
// 阻塞1s然后查询服务是否可用,先前的事件都会放任时间队列中
while(!client->wait_for_service(1s)){
if(!rclcpp::ok()){
RCLCPP_ERROR(this->get_logger(),"ROS上下文异常退出");
return;
}
RCLCPP_INFO(this->get_logger(),"服务未启动等待服务启动");
}
// 构建请求
auto req = std::make_shared<MyService::Request>();
req -> set__user_name("client_node2");
req -> set__stamp(this->get_clock()->now());
req -> set__age(std::rand()%100+1);
// 异步发送请求,并绑定响应事件的回调函数
client->async_send_request(req,std::bind(&ClientTwoNode::getFuture,this,std::placeholders::_1));
}
// 响应的回调函数的参数的future一个结果占位符,存储 “如何获取结果” 的逻辑,通过get获取结果,get()仅在响应回调中调用一次,不能多次get
void getFuture(rclcpp::Client<MyService>::SharedFuture future){
auto rep= future.get();
RCLCPP_INFO(this->get_logger(),"成功获取序列号%s",rep->sequence.c_str());
}
private:
rclcpp::Client<demo_cpp_test::srv::MyService>::SharedPtr client;
rclcpp::TimerBase::SharedPtr timer;
};
int main(int argc,char** argv){
rclcpp::init(argc,argv);
rclcpp::spin(std::make_shared<ClientTwoNode>("client_node2"));
rclcpp::shutdown();
}#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <demo_cpp_test/srv/my_service.hpp>
#include <builtin_interfaces/msg/time.hpp>
#include <functional>
#include <chrono>
using MyService = demo_cpp_test::srv::MyService;
using namespace std::chrono_literals;
class ClientTwoNode:public rclcpp::Node{
public:
explicit ClientTwoNode(const std::string &node_name):Node(node_name){
RCLCPP_INFO(this->get_logger(),"客户端clinet_node2启动");
srand(time(NULL));
client = this -> create_client<demo_cpp_test::srv::MyService>("service_topic");
timer = this -> create_wall_timer(10s,std::bind(&ClientTwoNode::resigerUsername,this));
}
void resigerUsername(){
// 阻塞1s然后查询服务是否可用,先前的事件都会放任时间队列中
while(!client->wait_for_service(1s)){
if(!rclcpp::ok()){
RCLCPP_ERROR(this->get_logger(),"ROS上下文异常退出");
return;
}
RCLCPP_INFO(this->get_logger(),"服务未启动等待服务启动");
}
// 构建请求
auto req = std::make_shared<MyService::Request>();
req -> set__user_name("client_node2");
req -> set__stamp(this->get_clock()->now());
req -> set__age(std::rand()%100+1);
// 异步发送请求,并绑定响应事件的回调函数
client->async_send_request(req,std::bind(&ClientTwoNode::getFuture,this,std::placeholders::_1));
}
// 响应的回调函数的参数的future一个结果占位符,存储 “如何获取结果” 的逻辑,通过get获取结果,get()仅在响应回调中调用一次,不能多次get
void getFuture(rclcpp::Client<MyService>::SharedFuture future){
auto rep= future.get();
RCLCPP_INFO(this->get_logger(),"成功获取序列号%s",rep->sequence.c_str());
}
private:
rclcpp::Client<demo_cpp_test::srv::MyService>::SharedPtr client;
rclcpp::TimerBase::SharedPtr timer;
};
int main(int argc,char** argv){
rclcpp::init(argc,argv);
rclcpp::spin(std::make_shared<ClientTwoNode>("client_node2"));
rclcpp::shutdown();
}cmake_minimum_required(VERSION 3.8)
project(demo_cpp_test)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# ${PROJECT_NAME} 当前包
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rosidl_default_generators REQUIRED)
find_package(builtin_interfaces REQUIRED)
# 生成消息代码(必须在add_executable之前,确保头文件先生成)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/MyMessage.msg"
"srv/MyService.srv"
DEPENDENCIES builtin_interfaces
)
add_executable(topicNode1 src/topic_node1.cpp) # 注意:源文件需写全后缀(.cpp)
ament_target_dependencies(topicNode1 rclcpp builtin_interfaces)
add_executable(topicNode2 src/topic_node2.cpp)
ament_target_dependencies(topicNode2 rclcpp builtin_interfaces)
add_executable(topicNode3 src/topic_node3.cpp)
ament_target_dependencies(topicNode3 rclcpp builtin_interfaces)
add_executable(serviceNode src/service_node.cpp)
ament_target_dependencies(serviceNode rclcpp builtin_interfaces)
add_executable(clientNode1 src/client_node1.cpp)
ament_target_dependencies(clientNode1 rclcpp builtin_interfaces)
add_executable(clientNode2 src/client_node2.cpp)
ament_target_dependencies(clientNode2 rclcpp builtin_interfaces)
# 将自定义消息的类型支持库链接到目标
rosidl_get_typesupport_target(
myMessage # 表示所有的自定义消息接口
${PROJECT_NAME}
"rosidl_typesupport_cpp" # 类型支持后端(C++ 用这个,Python 无需此步骤)
)
target_link_libraries(topicNode1 ${myMessage})
target_link_libraries(topicNode2 ${myMessage})
target_link_libraries(topicNode3 ${myMessage})
target_link_libraries(serviceNode ${myMessage})
target_link_libraries(clientNode1 ${myMessage})
target_link_libraries(clientNode2 ${myMessage})
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
install(TARGETS topicNode1 topicNode2 topicNode3 serviceNode clientNode1 clientNode2
DESTINATION lib/${PROJECT_NAME}
)
install(DIRECTORY msg srv launch
DESTINATION share/${PROJECT_NAME}
)
# 导出消息运行时依赖(供其他包依赖时使用)
ament_export_dependencies(rosidl_default_runtime)
ament_package()import launch
import launch_ros
def generate_launch_description():
return launch.LaunchDescription(
[
# launch_ros.actions.Node(
# package = 'demo_cpp_test',
# executable = 'topicNode1',
# name = 'topic_node1',
# ),
# launch_ros.actions.Node(
# package = 'demo_cpp_test',
# executable = 'topicNode2',
# name = 'topic_node2',
# ),
# launch_ros.actions.Node(
# package = 'demo_cpp_test',
# executable = 'topicNode3',
# name = 'topic_node3',
# ),
launch_ros.actions.Node(
package = 'demo_cpp_test',
executable = 'serviceNode',
name = 'service_node',
),
launch_ros.actions.Node(
package = 'demo_cpp_test',
executable = 'clientNode1',
name = 'client_node1',
),
launch_ros.actions.Node(
package = 'demo_cpp_test',
executable = 'clientNode2',
name = 'client_node2',
),
]
)参数设置
Python的人脸检测将模型的参数由ros的参数机制进行设置,受用命令行中的--ros-args -p 参数名:=参数值
self.declare_parameter('number_of_times_to_upsampl',1)
self.declare_parameter('model','hog')
self.number_of_times_to_upsampl = self.get_parameter('number_of_times_to_upsampl').value
self.model= self.get_parameter('model').value订阅参数更新实现,更改服务端代码
def __init__(self):
super().__init__('face_detect_service_node')
self.service = self.create_service(FaceInterfaces,'face_detect',self.face_detect_callback)
self.bridge = CvBridge()
self.declare_parameter('number_of_times_to_upsampl',1)
self.declare_parameter('model','hog')
self.number_of_times_to_upsampl = self.get_parameter('number_of_times_to_upsampl').value
self.model= self.get_parameter('model').value
self.face_image_path = os.path.join(get_package_share_directory('demo_python_service'),'resource/face.jpg')
self.add_on_set_parameters_callback(self.parameters_callback)
self.get_logger().info('face detect service start')
def parameters_callback(self,paramters):
for paramter in paramters:
self.get_logger().info(f"{paramter.name}->{paramter.value}")
if paramter.name =='number_of_times_to_upsample':
self.number_of_times_to_upsample = paramter.value
if paramter.name== 'model':
self.model = paramter.value
return SetParametersResult('success')在 ROS2 中,节点只要用到参数机制(比如声明参数),就会自动生成一系列 参数相关的服务,可以通过 ros2 service list 命令查看,不过需要先启动节点。

我编写客户端代码,调用其自带的参数设置服务set_Parameters进行参数的设置,其服务接口为rcl_interfaces/srv/SetParameters,可以看到其消息接口本质上是一个复合接口,除了基本的数据结构还依赖其他的消息接口, 因此在构建的时候需要加上其他消息接口的依赖,注意消息接口中调用其他消息接口只需要包名/接口名这种形式。
import rclpy
from rclpy.node import Node
from face_interfaces.srv import FaceInterfaces
import face_recognition
import cv2
from ament_index_python.packages import get_package_share_directory
import os
from cv_bridge import CvBridge
import time
from rcl_interfaces.msg import SetParametersResult
class FaceDetectServiceNode(Node):
def __init__(self):
super().__init__('face_detect_service_node')
self.service = self.create_service(FaceInterfaces,'face_detect',self.face_detect_callback)
self.bridge = CvBridge()
self.declare_parameter('number_of_times_to_upsampl',1)
self.declare_parameter('model','hog')
self.number_of_times_to_upsampl = self.get_parameter('number_of_times_to_upsampl').value
self.model= self.get_parameter('model').value
self.face_image_path = os.path.join(get_package_share_directory('demo_python_service'),'resource/face.jpg')
self.add_on_set_parameters_callback(self.parameters_callback)
self.get_logger().info('face detect service start')
# 获取客户端传来的参数并进行设置
def parameters_callback(self,paramters):
for paramter in paramters:
self.get_logger().info(f"{paramter.name}->{paramter.value}")
if paramter.name =='number_of_times_to_upsample':
self.number_of_times_to_upsample = paramter.value
if paramter.name== 'model':
self.model = paramter.value
return SetParametersResult(successful=True)
def face_detect_callback(self,request,response):
if request.image.data:
cv_image= self.bridge.imgmsg_to_cv2(request.image)
self.get_logger().warn('image is null,use defacult')
else:
cv_image = cv2.imread(self.face_image_path)
self.get_logger().info('image is finishing')
start_time = time.time()
face_locations = face_recognition.face_locations(cv_image,number_of_times_to_upsample=self.number_of_times_to_upsampl,model=self.model)
response.use_time = time.time() - start_time
response.number = len(face_locations)
for top,right,bottom,left in face_locations:
response.top.append(top)
response.right.append(right)
response.bottom.append(bottom)
response.left.append(left)
return response
def main():
rclpy.init()
node = FaceDetectServiceNode()
rclpy.spin(node)
rclpy.shutdown()import rclpy
from rclpy.node import Node
from face_interfaces.srv import FaceInterfaces
import face_recognition
import cv2
from ament_index_python.packages import get_package_share_directory
import os
from cv_bridge import CvBridge
import time
from rcl_interfaces.srv import SetParameters
from rcl_interfaces.msg import Parameter,ParameterType,ParameterValue
class FaceDetectClientNode(Node):
def __init__(self):
super().__init__('face_detect_client_node')
self.bridge = CvBridge()
self.client = self.create_client(FaceInterfaces,'face_detect')
self.get_logger().info('face detect client start')
self.face_image_path = os.path.join(get_package_share_directory('demo_python_service'),'resource/face.jpg')
self.image = cv2.imread(self.face_image_path)
print(type(self.image))
print(self.image is None)
# 设置模型的客户端
def call_set_parameters(self,parameters):
update_param_client = self.create_client(SetParameters,'/face_detect_service_node/set_parameters')
while update_param_client.wait_for_service(timeout_sec=1.0) is False:
self.get_logger().info('wait parameters service!')
request = SetParameters.Request()
request.parameters = parameters
future = update_param_client.call_async(request)
rclpy.spin_until_future_complete(self,future)
response = future.result()
return response
# 更新模型的参数
def update_detect_model(self,model='hog'):
param= Parameter()
param.name ='model'
param_value = ParameterValue()
param_value.string_value = model
param_value.type =ParameterType.PARAMETER_STRING
param.value = param_value
response = self.call_set_parameters([param])
for result in response.results:
self.get_logger().info(f"result:{result.successful}{result.reason}")
def send_request(self):
while self.client.wait_for_service(timeout_sec = 1.0) is False:
self.get_logger().info('wait service start')
request = FaceInterfaces.Request()
request.image =self.bridge.cv2_to_imgmsg(self.image)
future=self.client.call_async(request)
future.add_done_callback(self.result_callback)
def result_callback(self,future):
response =future.result()
self.get_logger().info(f'face number :{response.number},use time : {response.use_time}')
self.show_response(response)
def show_response(self,response):
for i in range(response.number):
top=response.top[i]
right =response.right[i]
bottom= response.bottom[i]
left=response.left[i]
cv2.rectangle(self.image,(left,top),(right,bottom),(255,0,0),4)
# cv2.imshow('Face Detecte Result',self.image)
# cv2.waitKey(0)
def main():
rclpy.init()
node = FaceDetectClientNode()
node.update_detect_model('hog')
node.send_request()
node.update_detect_model('cnn')
node.send_request()
rclpy.spin(node)
rclpy.shutdown() 
C++使用参数节点
使用参数机制设置小海龟的比例系数和最大速度,代码都是差不多的就不过多写了
this->declare_parameter("k",k);
this->declare_parameter("max_speed",max_speed);
this->get_parameter("k",k);
this->get_parameter("max_speed",max_speed);
this->param_callback_handle = this->add_on_set_parameters_callback([&](const vector<Parameter> ¶meters)-> rcl_interfaces::msg::SetParametersResult{
rcl_interfaces::msg::SetParametersResult result;
result.successful=true;
for (const auto & parameter : parameters){
RCLCPP_INFO(this->get_logger(),"update param %s=%f",parameter.get_name().c_str(),parameter.as_double());
if(parameter.get_name()=="k")
k = parameter.as_double();
if(parameter.get_name()=="max_speed")
max_speed = parameter.as_double();
}
return result;
});ROS2 Launch
Launch 是 ROS2 的启动管理系统,用来一次性启动和配置多个节点及其参数,一般使用的是python的语言
Node(
package='turtlesim', # 节点所在功能包
executable='turtlesim_node', # 要运行的可执行文件
name='sim', # 节点名称(相当于 ros2 run ... --ros-args -r __node:=sim)
namespace='my_ns', # 节点命名空间
output='screen', # 日志输出方式:screen (终端显示) / log (保存到日志文件)
emulate_tty=True, # 保证输出有颜色(常用于 Docker/终端)
parameters=[ # 节点参数
{'background_r': 255, 'background_g': 255, 'background_b': 255},
'/path/to/config.yaml'
],
remappings=[ # 话题重映射
('/turtle1/cmd_vel', '/cmd_vel'),
('/turtle1/pose', '/pose')
],
arguments=['--ros-args', '--log-level', 'INFO'], # 额外命令行参数
ros_arguments=['--remap', '__ns:=/robot1'], # 专门的 ROS 参数(新版本推荐)
respawn=True, # 节点崩溃时是否自动重启
respawn_delay=2.0, # 重启延迟时间(秒)
prefix='gdb -ex run --args', # 前缀命令,比如用 gdb/valgrind 启动节点
cwd='ros_home', # 设置工作目录
env={'MY_ENV_VAR': 'value'} # 传递环境变量
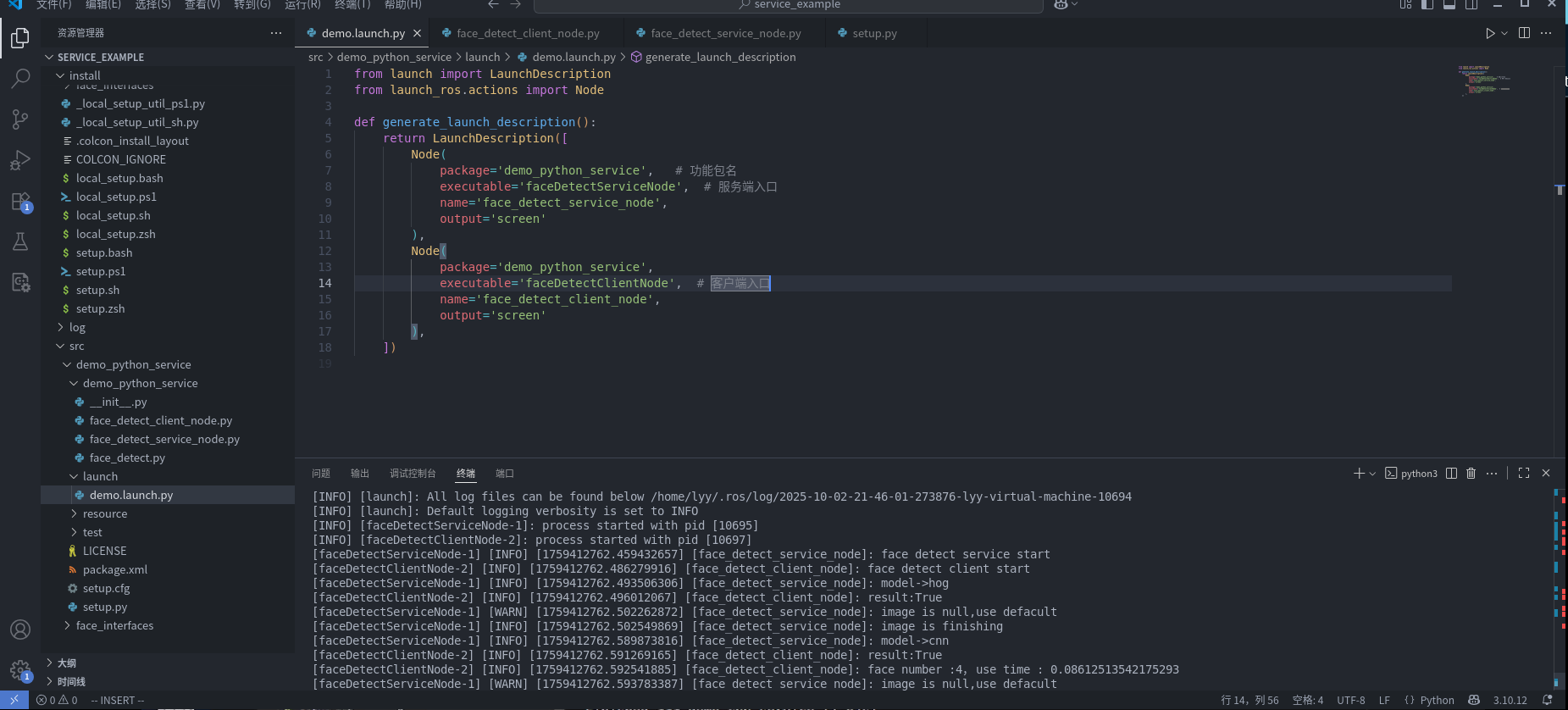
)我们使用launch同时启动客户端和服务端两个节点
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='demo_python_service', # 功能包名
executable='faceDetectServiceNode', # 服务端入口
name='face_detect_service_node',
output='screen'
),
Node(
package='demo_python_service',
executable='faceDetectClientNode', # 客户端入口
name='face_detect_client_node',
output='screen'
),
])
同时可以在launch中声明参数,但如果需要给节点的话需要一个转换
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
# 声明参数
DeclareLaunchArgument(
'model',
default_value='hog',
description='Face detect model: hog or cnn'
),
DeclareLaunchArgument(
'upsample',
default_value='1',
description='Number of times to upsample'
),
# 启动服务端
Node(
package='demo_python_service',
executable='faceDetectServiceNode',
name='face_service',
parameters=[{
'model': LaunchConfiguration('model'),
'number_of_times_to_upsample': LaunchConfiguration('upsample')
}]
),
# 启动客户端
Node(
package='demo_python_service',
executable='faceDetectClientNode',
name='face_client'
)
])launch 三大核心组件
-
LaunchDescription(启动描述)
-
作用:是整个 Launch 文件的入口,用来组织和返回所有要执行的动作。
-
特点:所有节点、参数、事件处理器等都需要被封装到
LaunchDescription([...])中。
-
-
Action(动作)
-
作用:定义实际要做的事情,比如启动节点(
Node)、声明参数(DeclareLaunchArgument)、设置环境变量(SetEnvironmentVariable)等。 -
特点:是 launch 文件中真正会被执行的“任务单元”。
-
-
Substitution(替换/变量)
-
作用:在运行时动态生成或替换值,比如包路径(
FindPackageShare)、命令行参数(LaunchConfiguration)、环境变量(EnvironmentVariable)等。 -
特点:为 Action 提供灵活的参数输入。
-
LaunchDescription 管理 → Action 执行 → Substitution 提供动态参数。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号