USART串口
1、通信接口
-
通讯的目的:将一个设备的数据传送到另一个设备,扩展硬件系统
-
通讯协议:制定通讯的规则,通讯双方按照协议规则进行数据收发
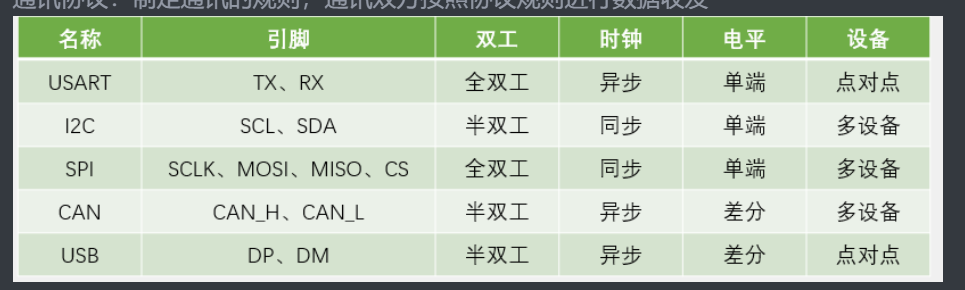
2、串口通信
-
串口是一种应用十分广泛的通讯接口,串口成本低、容易使用、通信线路简单,可实现两个设备的互相通信
-
单片机的串口可以使单片机与单片机、单片机与电脑、单片机与各式各样的模块相互通信,极大的扩展了单片机的应用范围,增强了单片机系统的硬件实力
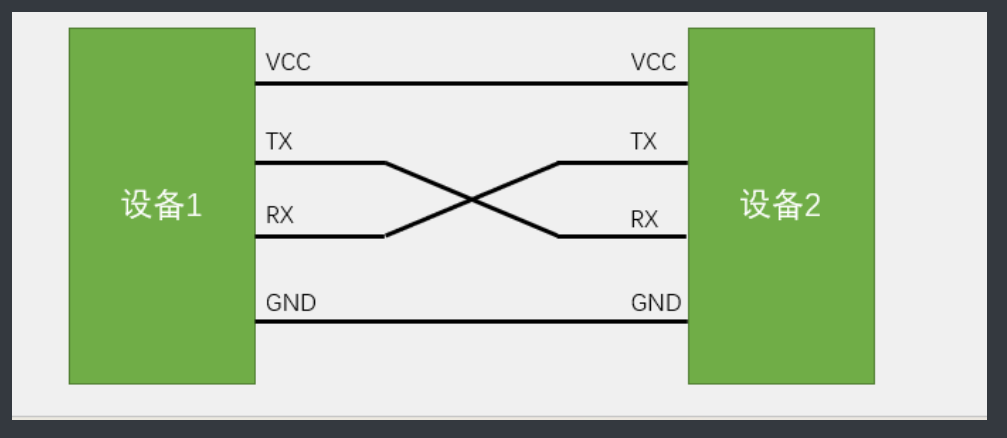
3、硬件电路
-
简单双向串口通信有两根通信线(发送端TX和接收端RX)
-
TX与RX要交叉连接
-
当只需单向的数据传输时,可以只接一根通信线
-
当电平标准不一致时,需要加电平转换芯片
4、 电平标准
-
电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有三种:
-
TTL电平:+3.3V或+5V表示1 , 0V表示0
-
RS232电平:-3 ~ -15V表示1, +3~ +15V表示0(大型电器使用)
-
RS485电平:两线压差 +2 ~ +6V表示1,-2 ~ -6表示0(差分信号,抗干扰能力强
-
5、 串口参数及时序
-
波特率:串口通信的速率
-
起始位:标志一个数据帧的开始,固定为低电平
-
数据位:数据帧的有效载荷,1为高电平,0为低电平,低位先行
-
校验位:用于数据验证,根据数据位计算得来(无校验,奇校验,偶校验)
-
停止位:用于数据帧间隔,固定为高电平
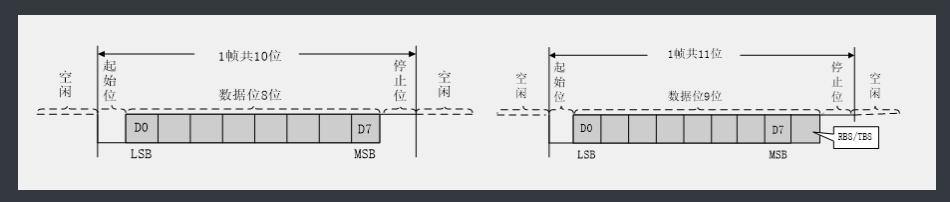
空闲为高电平
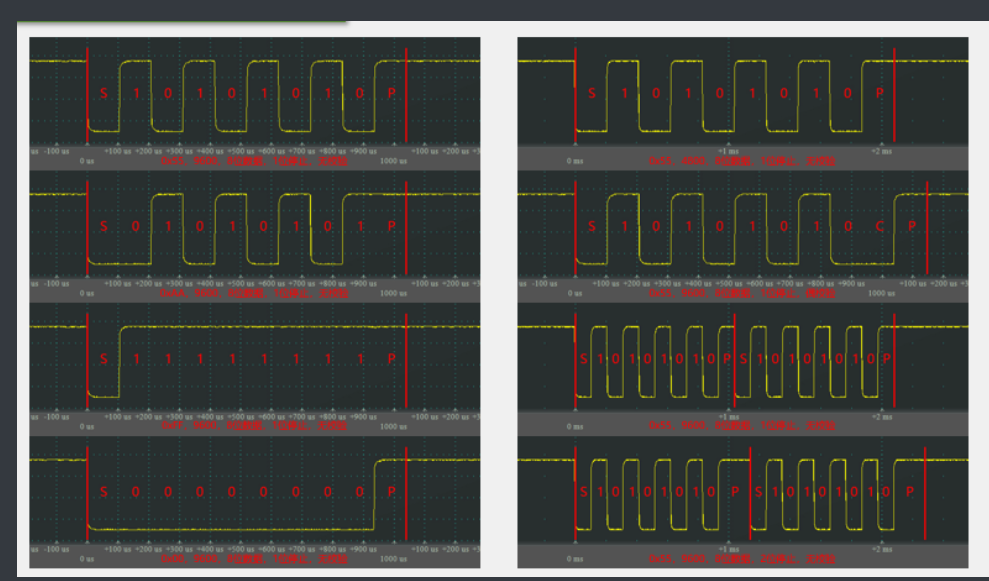
6、串口时序波形图:
7、USART简介
-
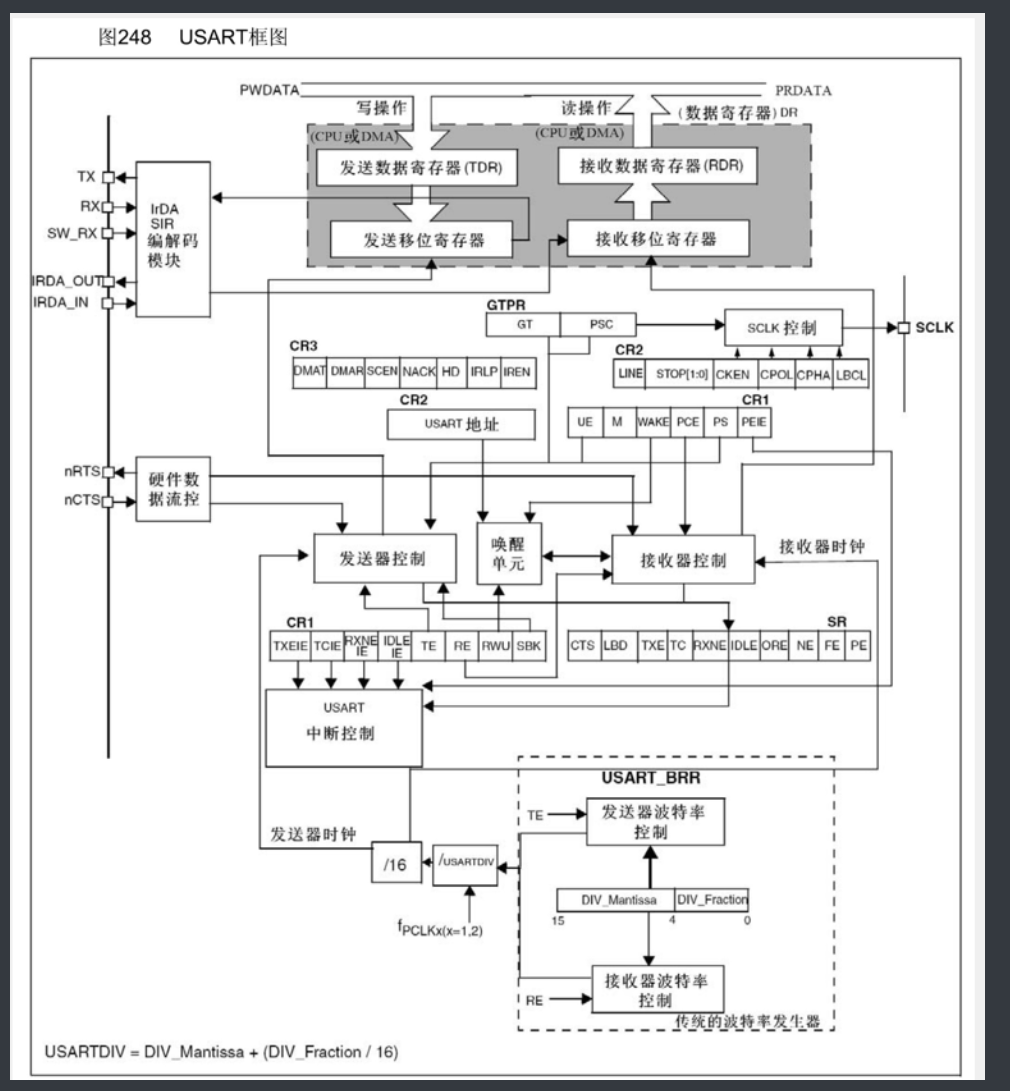
USART(Universal Synchronous/Asynchronous Receiver/Transmitter)通用同步/异步收发器
-
USART是STM32内部集成的硬件外设,可根据数据寄存器的一个字节数据自动生成数据帧时序,从TX引脚发送出去,也可自动接收RX引脚的数据帧时序,拼接为一个字节数据,存放在数据寄存器里
-
再带波特率发生器,最高达4.5Mbits/s
-
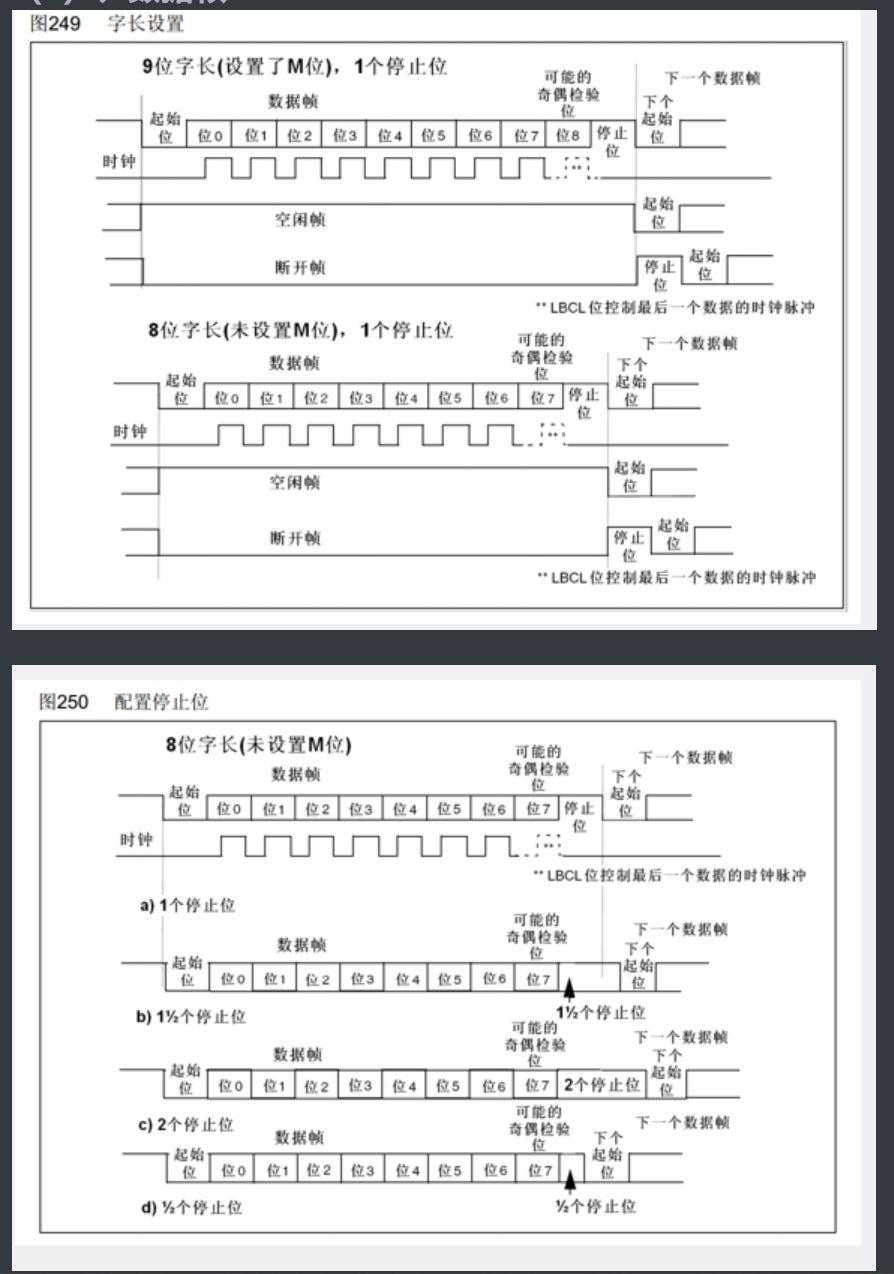
可配置数据位长度(8/9)、停止位长度(0.5/1/1.5/2)
-
可选校验位(无校验,奇校验,偶校验)
-
支持同步模式、硬件流控制、DMA、智能卡、IrDA、LIN
-
STM32F103C8T6 USART资源: USART1、 USART2、 USART3
(1)、USART框图
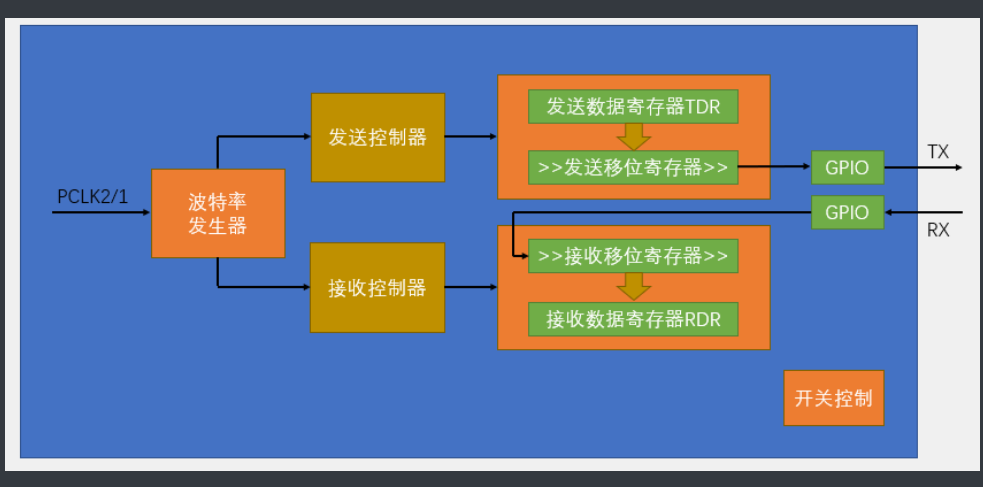
(2)、USART基本结构
(3)、数据帧
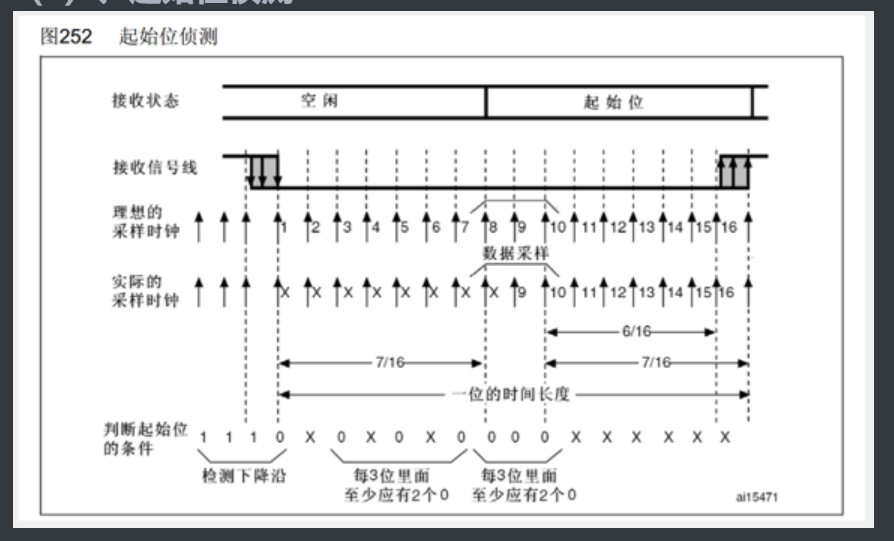
(4)、起始位侦测
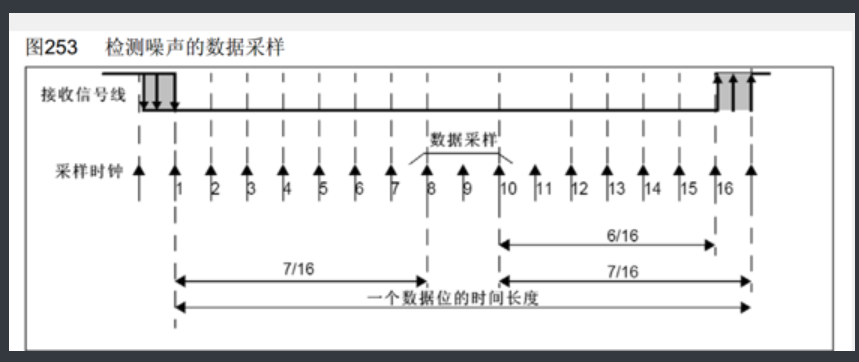
(5)、数据采样
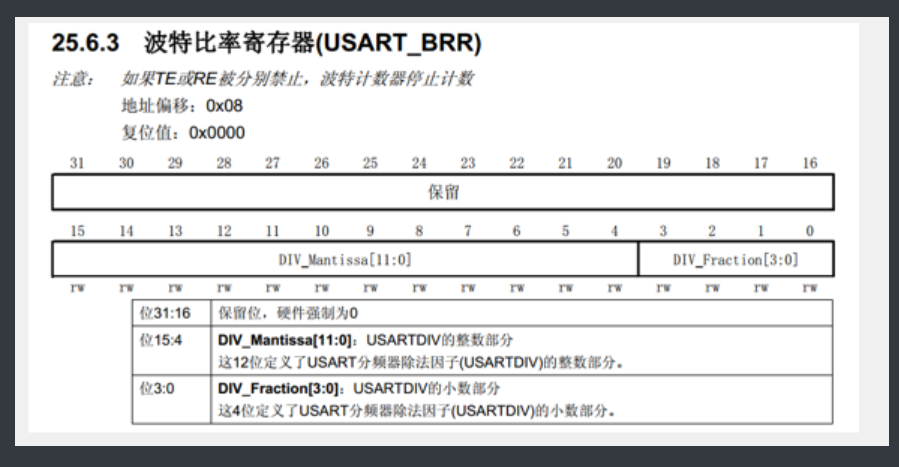
(6)、波特率发生器
-
发送器和接收器的波特率由波特率寄存器BRR里的DIV确定
-
计算公式:波特率 = fPCLK2/1 / (16 * DIV)
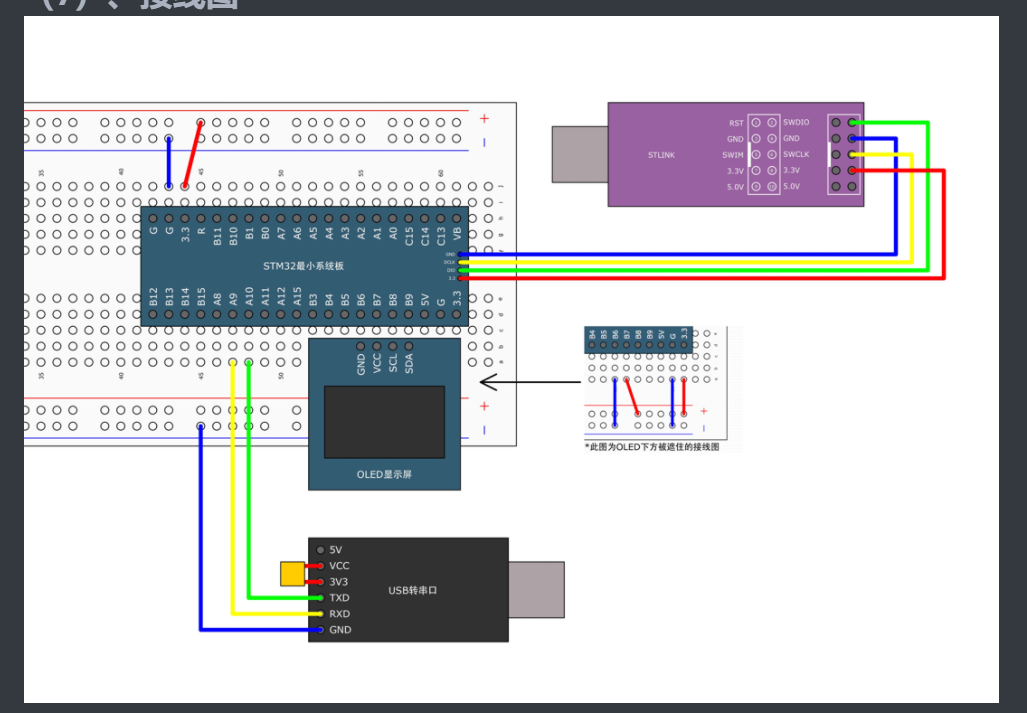
(7)、接线图
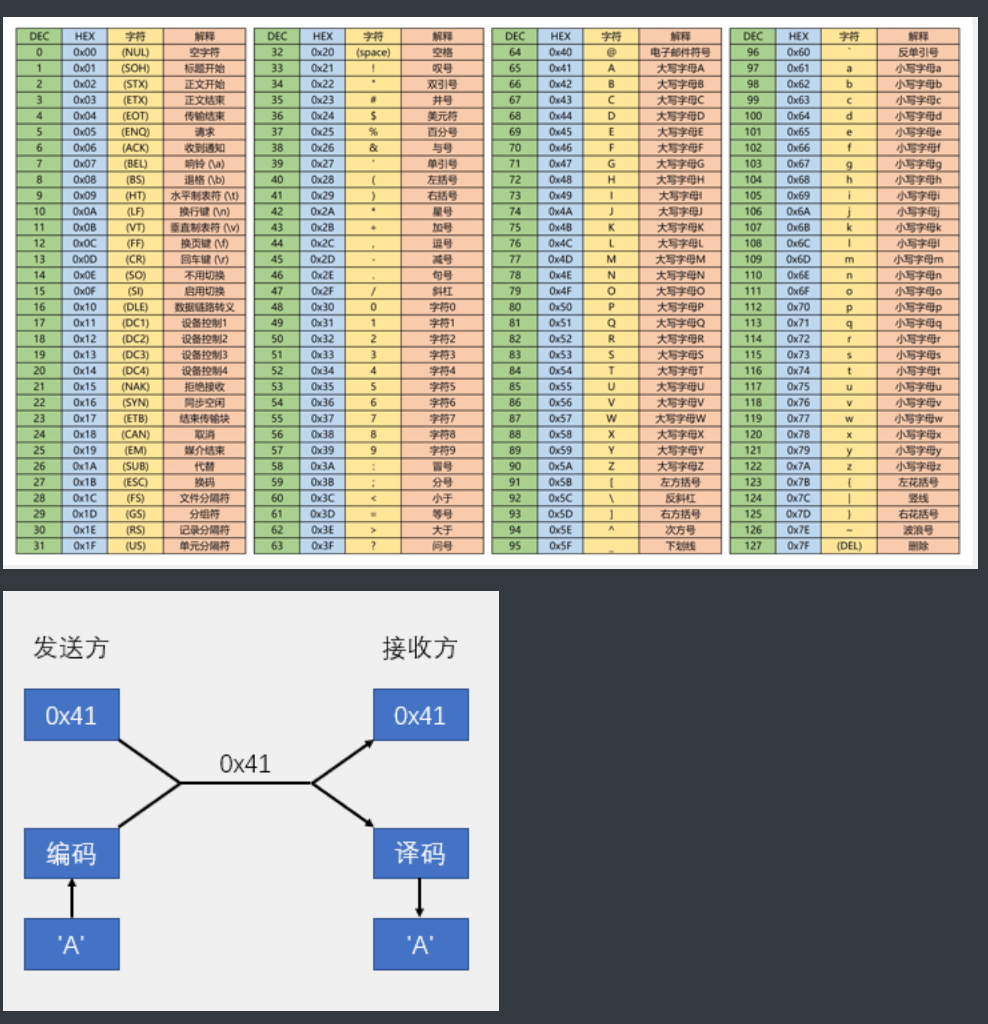
(8)、数据模式
-
HEX模式/十六进制模式/二进制模式:以与原始数据的形式显示
-
文本模式/字符模式:以原始数据编码后的形式显示
(9)、串口发送代码
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
/**
* 函 数:串口初始化
* 参 数:无
* 返 回 值:无
*/
void Serial_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx; //模式,选择为发送模式
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
}
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++) //遍历数组
{
Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止
{
Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
/**
* 函 数:次方函数(内部使用)
* 返 回 值:返回值等于X的Y次方
*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1; //设置结果初值为1
while (Y --) //执行Y次
{
Result *= X; //将X累乘到结果
}
return Result;
}
/**
* 函 数:串口发送数字
* 参 数:Number 要发送的数字,范围:0~4294967295
* 参 数:Length 要发送数字的长度,范围:0~10
* 返 回 值:无
*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字
}
}
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数
return ch;
}
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char String[100]; //定义字符数组
va_list arg; //定义可变参数列表数据类型的变量arg
va_start(arg, format); //从format开始,接收参数列表到arg变量
vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中
va_end(arg); //结束变量arg
Serial_SendString(String); //串口发送字符数组(字符串)
}
(10)、串口发送 + 接收
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_RxData; //定义串口接收的数据变量
uint8_t Serial_RxFlag; //定义串口接收的标志位变量
/**
* 函 数:串口初始化
* 参 数:无
* 返 回 值:无
*/
void Serial_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
/*中断输出配置*/
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接收数据的中断
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //选择配置NVIC的USART1线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
}
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++) //遍历数组
{
Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止
{
Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
/**
* 函 数:次方函数(内部使用)
* 返 回 值:返回值等于X的Y次方
*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1; //设置结果初值为1
while (Y --) //执行Y次
{
Result *= X; //将X累乘到结果
}
return Result;
}
/**
* 函 数:串口发送数字
* 参 数:Number 要发送的数字,范围:0~4294967295
* 参 数:Length 要发送数字的长度,范围:0~10
* 返 回 值:无
*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字
}
}
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数
return ch;
}
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char String[100]; //定义字符数组
va_list arg; //定义可变参数列表数据类型的变量arg
va_start(arg, format); //从format开始,接收参数列表到arg变量
vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中
va_end(arg); //结束变量arg
Serial_SendString(String); //串口发送字符数组(字符串)
}
/**
* 函 数:获取串口接收标志位
* 参 数:无
* 返 回 值:串口接收标志位,范围:0~1,接收到数据后,标志位置1,读取后标志位自动清零
*/
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1) //如果标志位为1
{
Serial_RxFlag = 0;
return 1; //则返回1,并自动清零标志位
}
return 0; //如果标志位为0,则返回0
}
/**
* 函 数:获取串口接收的数据
* 参 数:无
* 返 回 值:接收的数据,范围:0~255
*/
uint8_t Serial_GetRxData(void)
{
return Serial_RxData; //返回接收的数据变量
}
/**
* 函 数:USART1中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断
{
Serial_RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量
Serial_RxFlag = 1; //置接收标志位变量为1
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除USART1的RXNE标志位
//读取数据寄存器会自动清除此标志位
//如果已经读取了数据寄存器,也可以不执行此代码
}
}
(11)、数据包格式
-
HEX数据包
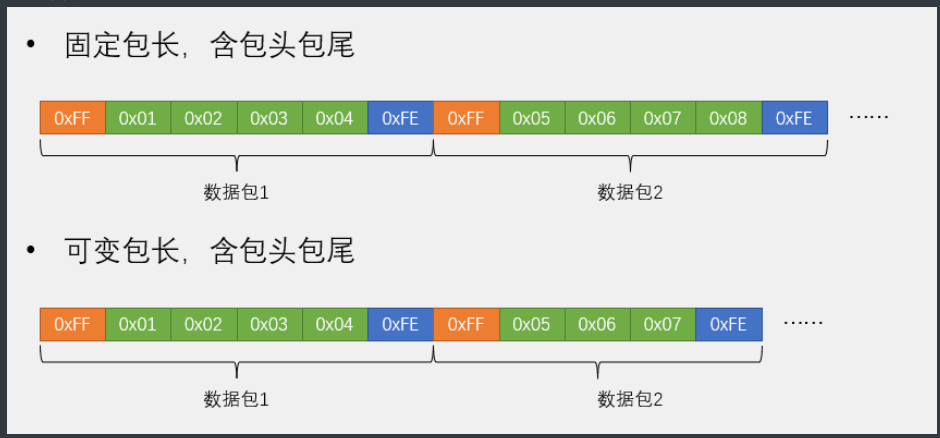
优点:传输最直接,解析数据简单,适合模块发送原始的数据
缺点:灵活性不足,载荷容易和包头包尾重复
-
文本数据包!
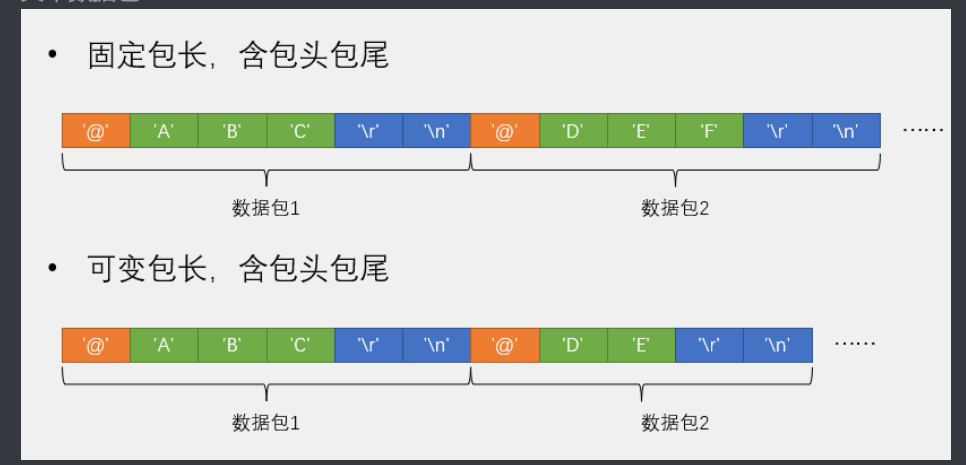
优点:数据直观易理解,非常灵活,适合输入指令进行人机交互的场合
缺点:解析效率低
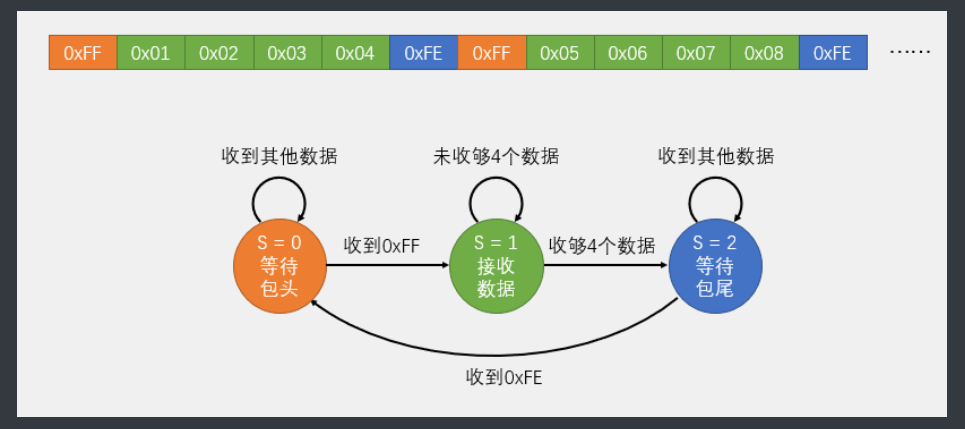
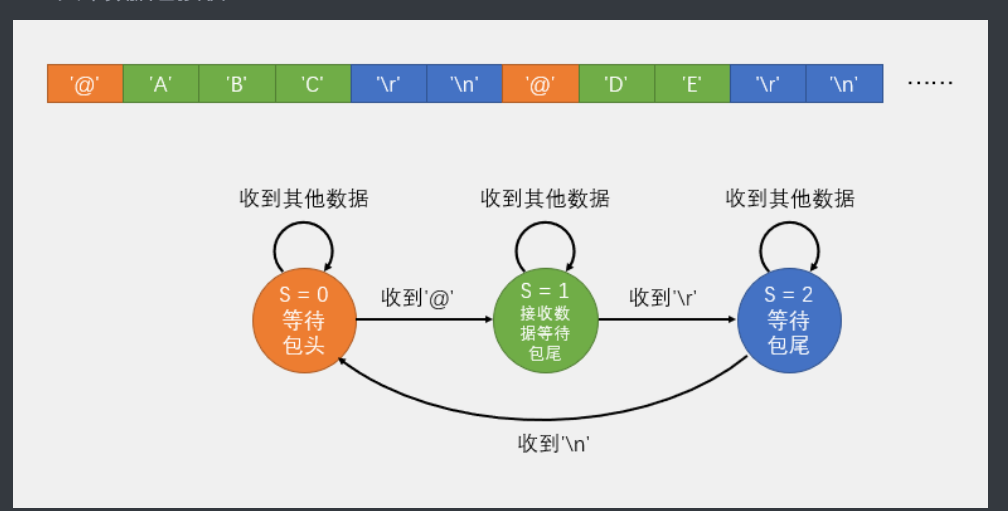
(12)、数据包的收发流程
-
HEX数据包接收
-
文本数据包接收

 浙公网安备 33010602011771号
浙公网安备 33010602011771号