汽车充电口圆孔分割标注优化方法
汽车充电口圆孔分割标注优化方法
背景:国标充电口内含7个在同一平面内的规则圆孔,尺寸和分布是确定的。因此,充电机械臂可以依靠单目视觉使用PnP算法求解充电口到相机的相对位姿。PnP有多种求解方法且广泛应用,通常需要大于3对的不共线3D-2D点对以完成求解。在充电口内的圆孔平面建立3D坐标系,可由国标数据直接获得7个圆孔的尺寸以及圆心坐标;在相机图像上,可以通过检测算法识别7个圆孔的像素尺寸和中心。这样,得到7对3D-2D点对,符合PnP问题的求解要求。在该PnP问题中,3D点已知且相对精准,2D点的检测精度决定了最终的求解精度。在检测图像圆孔的算法中,相较于传统计算机视觉算法,基于深度学习的语义/实例分割算法具有较高的精度和鲁棒性,适合在终端自动化程序中部署。
基于深度学习的语义/实例分割算法依赖高精度的标注数据,传统语义分割标注是使用多边形描绘待分割物体的像素边界。在本案例中,待分割对象是规则的正圆或者椭圆(当相机光轴与圆孔平面不垂直),针对这种情况提出了一种分割标注的优化方法:对每一个待标注圆孔局部图像求解Canny边缘特征点,然后手动选取Canny外轮廓点作为圆孔边界点,使用椭圆拟合算法进行标注。实测标注效率从5min/frame提升到了2min/frame,精度也较传统分割标注更高。
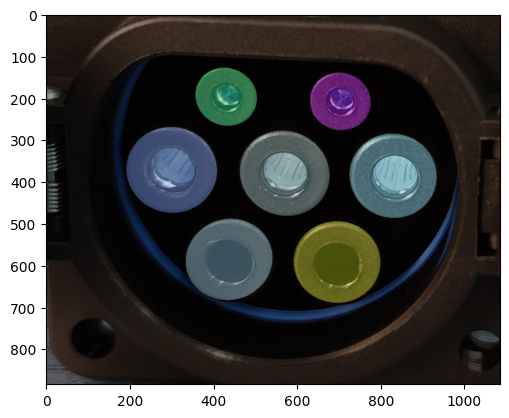
分割标注结果示例
|
flowchart LR |
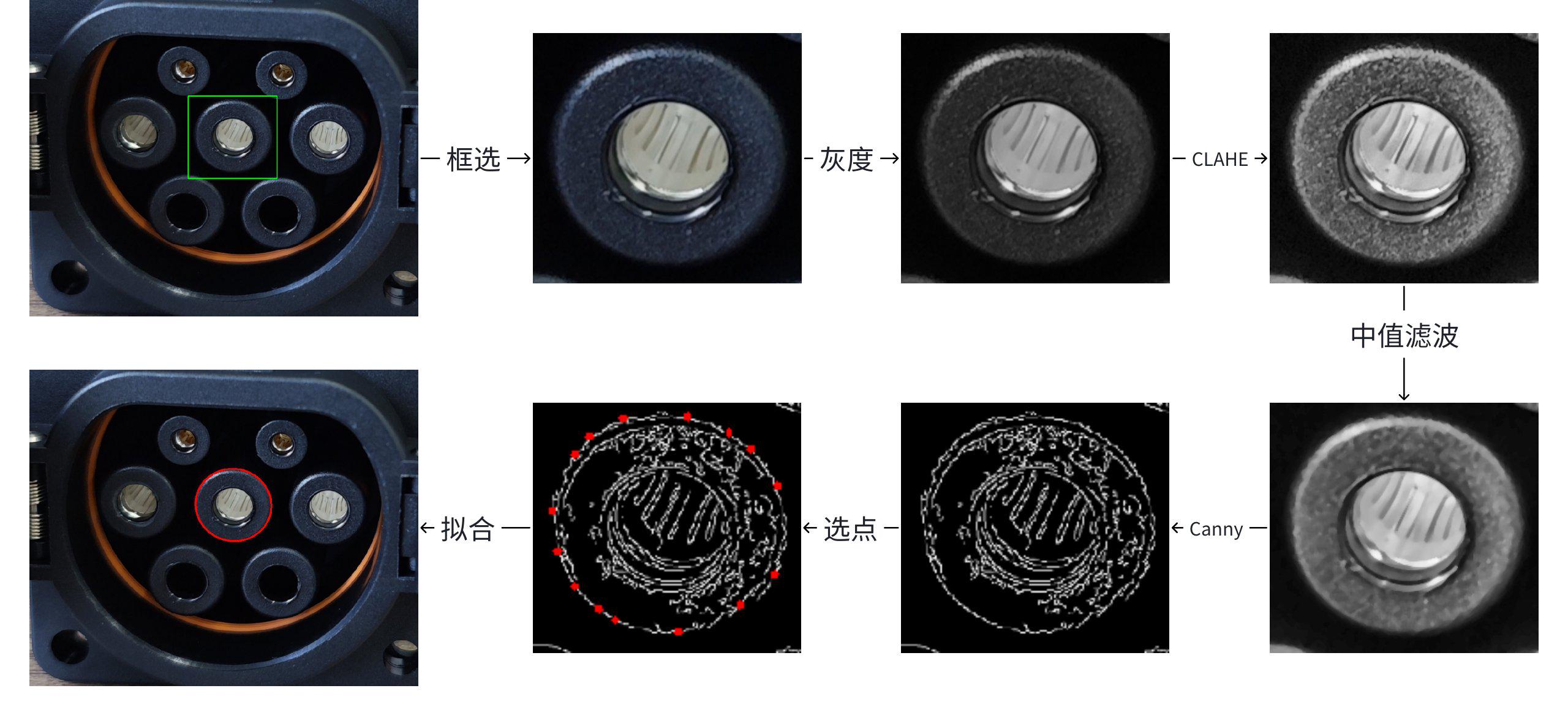
流程如图所示,有以下的关键步骤:
框选圆孔:原图背景比较复杂,用鼠标框选出圆孔区域在局部图像上处理,可以增强算法的适应性,减少图像处理的工作量和难度。后续可以应用同样的自适应图像算法。
图像预处理:采用了RGB转灰度、自适应直方图均衡化(CLAHE)、中值滤波,三个预处理。 其中,自适应直方图均衡化可以减少亮度不均的影响,提高局部对比度;中值滤波则可以减少图像噪声,平滑图像而不会模糊边缘。
Canny边缘检测:通过计算灰度图像的梯度来检测图像中的边缘,可以通过调整算法参数,保留尽量多的外层轮廓边缘,供后续的手工点选轮廓。
点选轮廓:在Canny边缘检测结果图像上均匀地手工点选圆孔的外轮廓。如果Canny没有检测到足够的高质量边缘点,可以选择从框选的原图出发,手工描绘圆孔的轮廓点。
椭圆拟合:使用最小二乘法拟合椭圆(正圆是特殊的椭圆)。
标注工具的操作方法如下:
在打开的图像上,使用鼠标左键按住拖动画矩形框,框选出准备标注的圆孔区域。
在弹出的ROI(Canny)图中,用鼠标左键点选圆孔轮廓点,会自动吸附到离鼠标点击最近的Canny边缘点上。一般选10-15个点能得到理想的结果。按鼠标中键可回退一个选点。
选完点后按空格键结束,此时主图像会用红色椭圆显示刚刚标注的圆孔轮廓。按ESC键可回退一个圆孔轮廓。
重复1~3,按照从左到右,从上到下的顺序标完7个圆孔。
如果Canny算法效果不佳,可以按R键屏蔽Canny算法,然后重新执行1~3,使用原图手工描绘轮廓。标完一个圆孔后,恢复使用Canny方法。
完成所有圆孔标注后按Q键结束当前图像标注,生成mask和polygon的标注结果。
|
注意: 使用去畸变的图像标注,可以保证圆孔在图像上的投影特征(即正圆或者椭圆)。所以在模型训练和推理中,也建议使用去畸变的图像! 一定要按照指定的顺序进行标注,顺序为: 1 2 3 4 5 6 7 |
由于充电口圆孔实物的尺寸/位置均符合国家标准,且它们在同一平面。所以可以应用图像的单应性来验证标注的精度,以及更进一步地优化标注结果。
单应性(Homography):描述同一三维平面在两个不同视角下的投影变换关系,用于实现点对点的精确映射。单应矩阵(H)的计算只需要4个非共线的平面点对,而不依赖相机的内外参。因此,可以比较容易地使用单应性来验证和优化标注结果。而如果知道相机内参K,也可以利用H来计算外参,即相机位姿。
具体步骤:
坐标转换:将现实圆孔平面看作一个二维图像平面,1m的长度对应1个像素;
求解单应矩阵:利用a.得到的图像和相机图像上的圆孔圆心点对,计算单应矩阵H;
反投影验证:通过H,将a图像的标准圆孔投影回相机图像,对比圆孔位置和尺寸的投影偏差,偏差过大则表明该图像标注精度低;
标注优化(可选):根据平面满足单应性的原理,将反投影的圆孔圆心位置和尺寸偏差作为损失函数,用最小二乘法优化图像标注的圆孔参数。
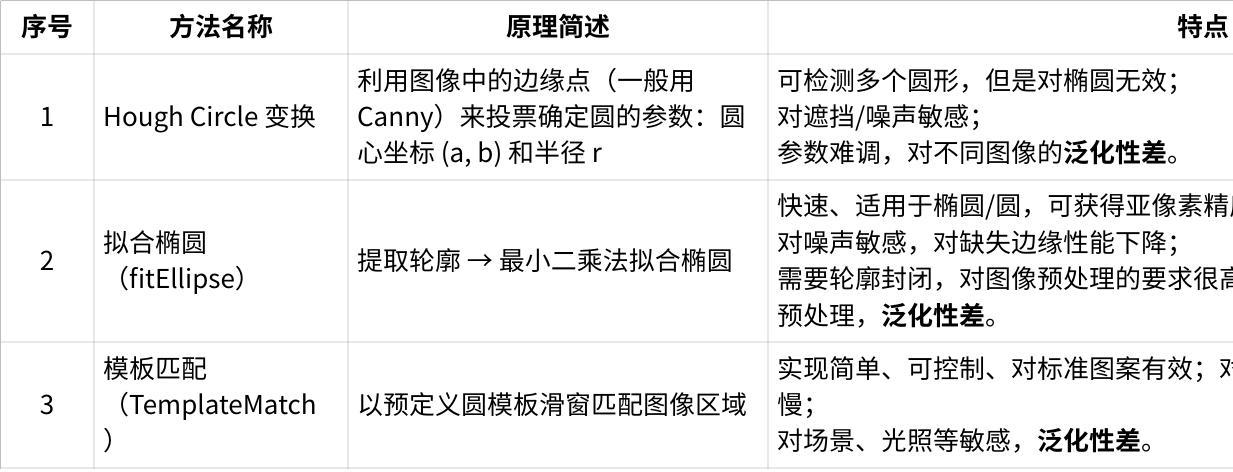
传统CV有很多可以实现圆形检测的算法,但是这些算法需要比较细致的手调参数才能达到较好的效果,且参数对图像具有特异性,导致这些算法的泛化性、鲁棒性都比较差,无法作为终端设备上自动设别圆孔的方法。
下表是尝试使用过检测圆孔的传统CV算法:
点击图片可查看完整电子表格
传统CV算法的核心问题:泛化性差。
举例说明:
|
预处理:腐蚀 |
预处理:膨胀 |
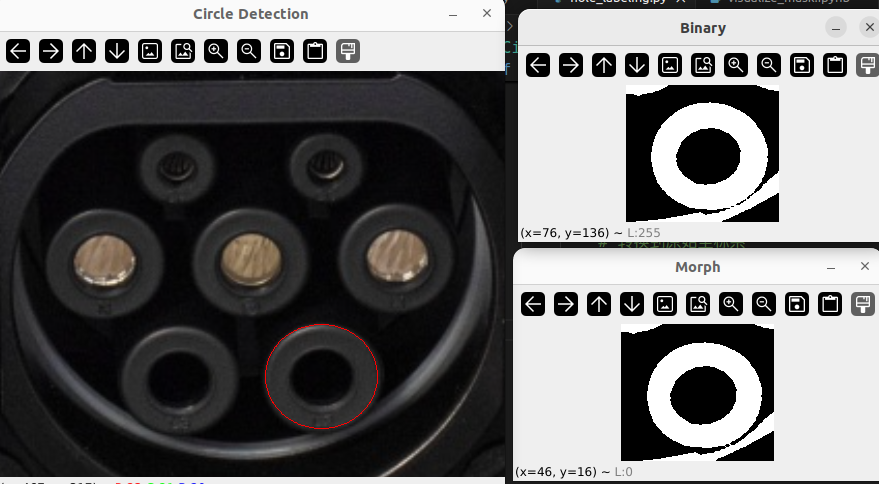
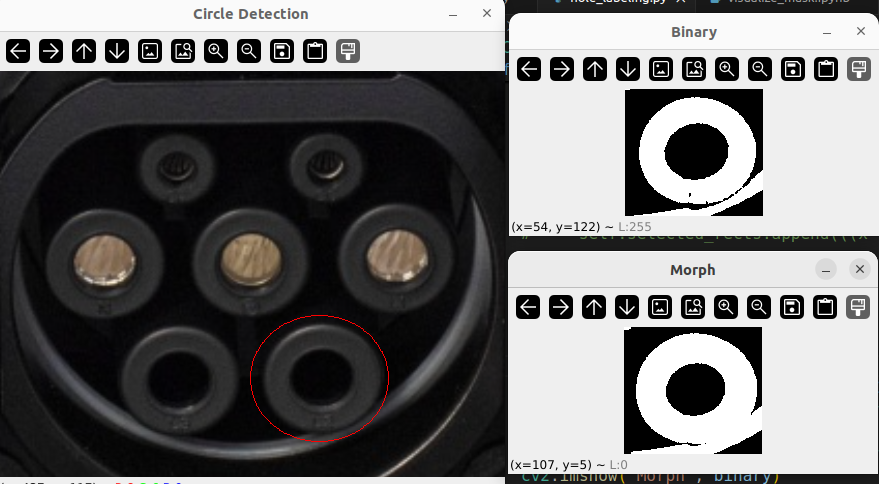
在上面的图像中圆孔轮廓和外轮廓有少许粘黏(连通),需要对二值化图进行腐蚀操作,将圆孔轮廓和外部轮廓分离;而如果执行膨胀操作,会让它们更加粘黏。从而的得不到圆孔轮廓。
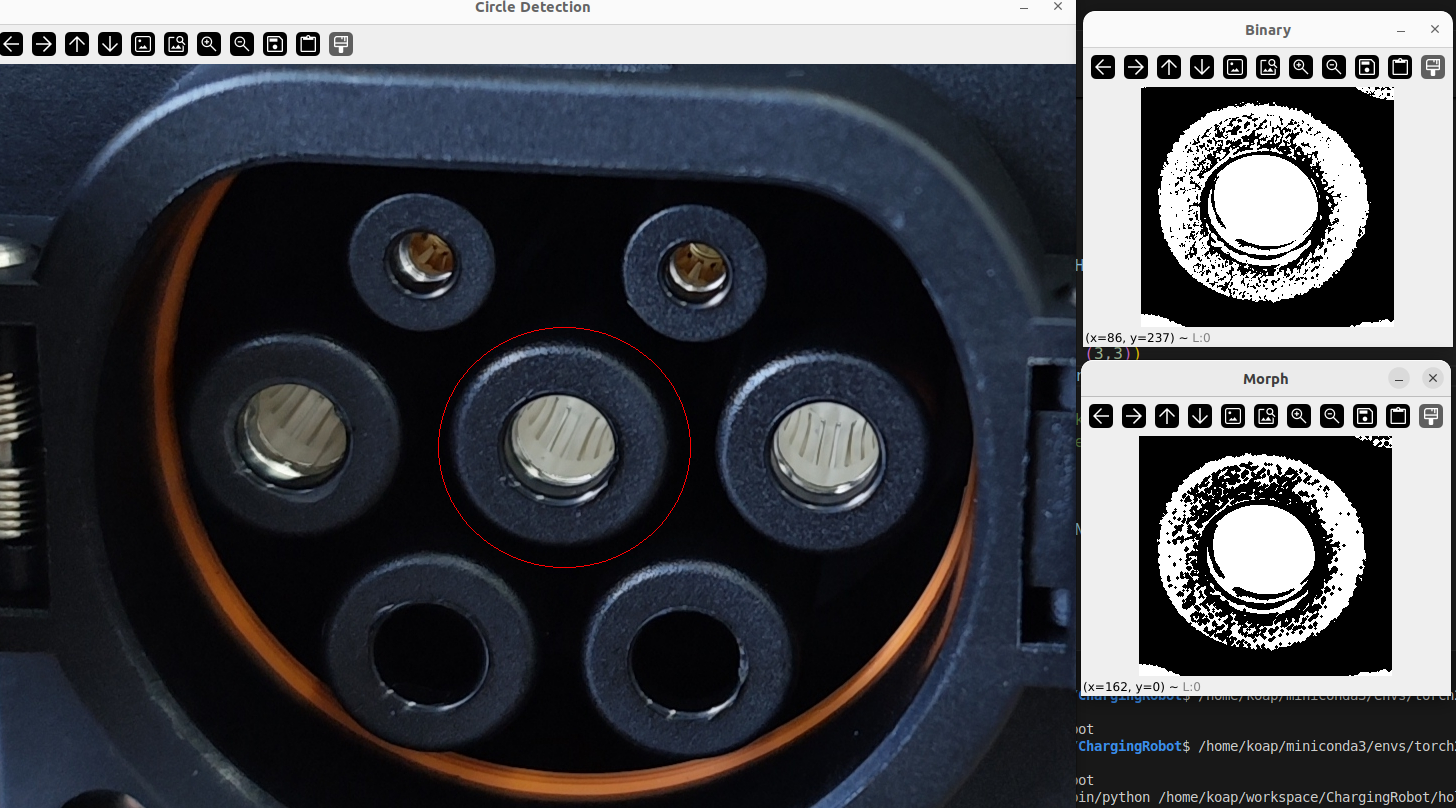
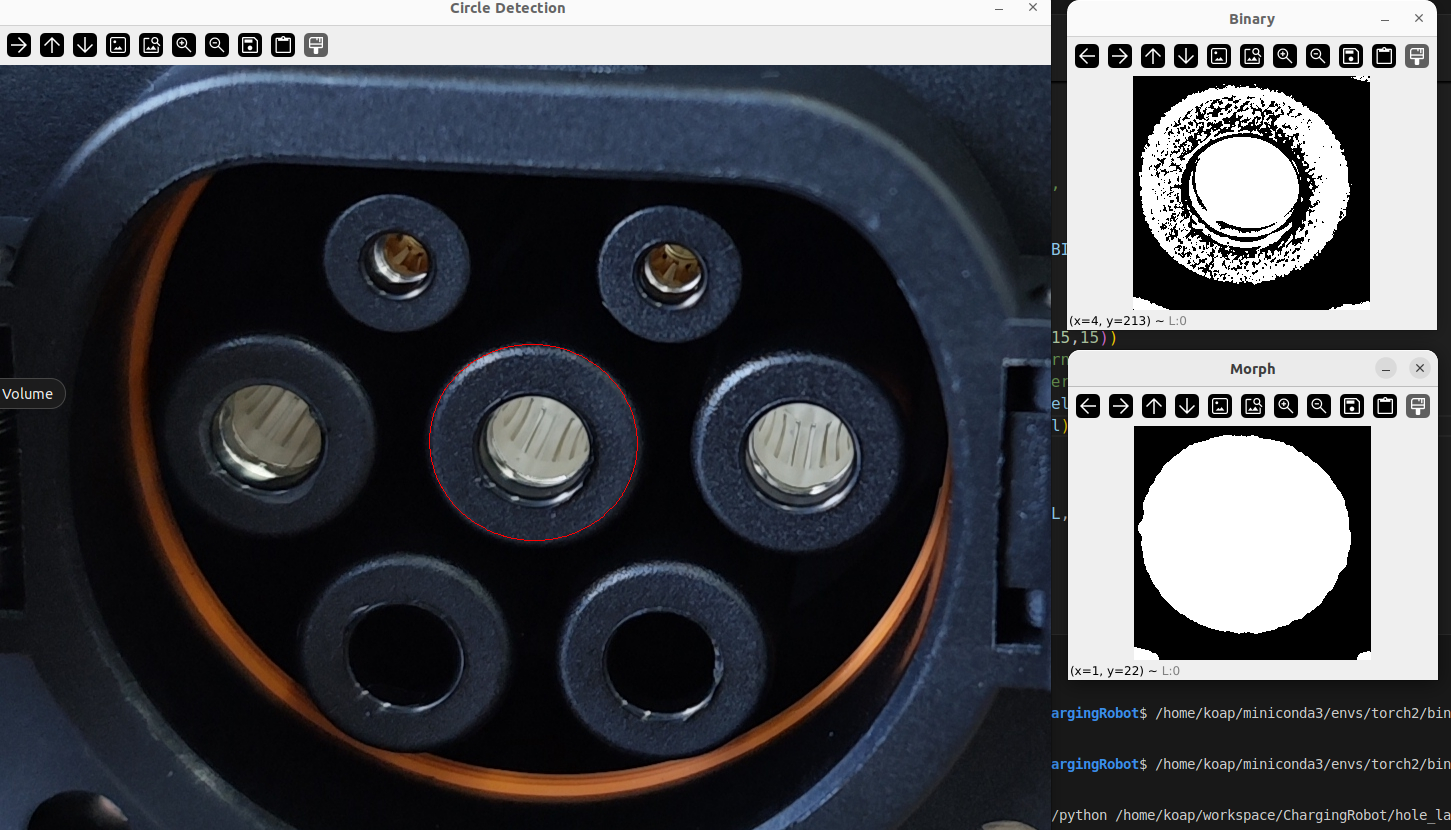
而下面的图像中,圆孔中由于材料的漫反射,有亮暗不一的噪点,需要对二值化图进行闭运算(先膨胀再腐蚀),如果只进行腐蚀或者开运算,无法得到圆孔的连通域。且由于图像尺度的差异,形态学运算的核大小参数也不能共用。
|
预处理:腐蚀 |
预处理:闭运算 |
|
可见传统CV方法的主要局限:参数需要精调,在不同场景下无法公用,导致泛化性能差。 |
在图像标注中,可以通过在传统CV方法中添加限制和人工手段,让它们更加精准和高效。
以本方法为例:
首先使用人工框选缩小图像处理的范围,减小复杂度;然后在局部图像上使用Canny边缘检测算法,得到足够的高质量边缘点;接着直接使用人工介入点选合适的边缘点,代替Hough Circle方法的投票累加方法;最后使用选择出来的边缘点来使用最小二乘法拟合椭圆,得到最终的准确标注结果。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号