Control of Mobile Robots 学习笔记(一)Introduction
《Control of mobile robot》是Gatech的Dr. Magnus Egerstedt在Coursera上发布的一个公开课(现在好像没在Coursera了,这位老师也不在Gatech了)。之前没有自主移动机器人方面的基础,学习的同时记录一下。
课件是从github上下载的。
在Module1(Introduction)中介绍了
- What is control theory?
- Dynamic model
- Cruise controller (定速器)
- Controller design basics and PID controller
What is control theory?
首先知道一些基本的术语:
- System = Something that changes over time (比如机器人)
- State = Representation of what the system is currently doing (描述系统当前的状态)
- Dynamics = Description of how the state changes (描述这些状态怎么变化)
- Control = Influence that change (影响这个变化)
一个系统如下图所示:

其中,x是系统状态,u是控制量,y是系统输出。r是参考状态
Dynamic model(动力学模型)
控制的核心问题是如何选择输入量u,使得系统
- 稳定
- 轨迹跟踪
- 鲁邦
...
用什么模型描述系统的动力学模型呢?预测模型

用微分方程描述系统的变化;状态的变化和状态以及控制量有关。
Cruise controller
(定速器或者Car model)
假设不考虑汽车的转弯,一直在直线行走,在此场景下,State是汽车的速度,Input是油门或者刹车,Dynamics是速度关于时间的变化情况
目标是将汽车根据参考速度(r)行走;即,t->∞时,x->r。e->0(e = r-y)
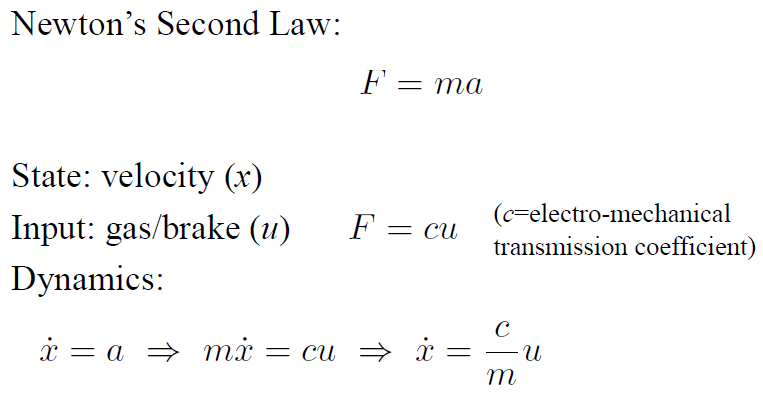
由于状态x是速度,求导得加速度a。根据上图式推导,得 derivartive (x) = c/m * u;
Controller design basics and PID controller
那么,有了Car model, 下一步是怎么设计u(控制器),使得汽车按照参考速度稳定行走?
Attempt 1: Bang Bang Controller
u=umax, if e > 0
u=0, if e = 0
u=-umax, if e < 0
当e > 0时,即 r-x > 0,汽车实际速度还没到目标速度,这时全速前进。反之,全速反方向移动。效果图如下:
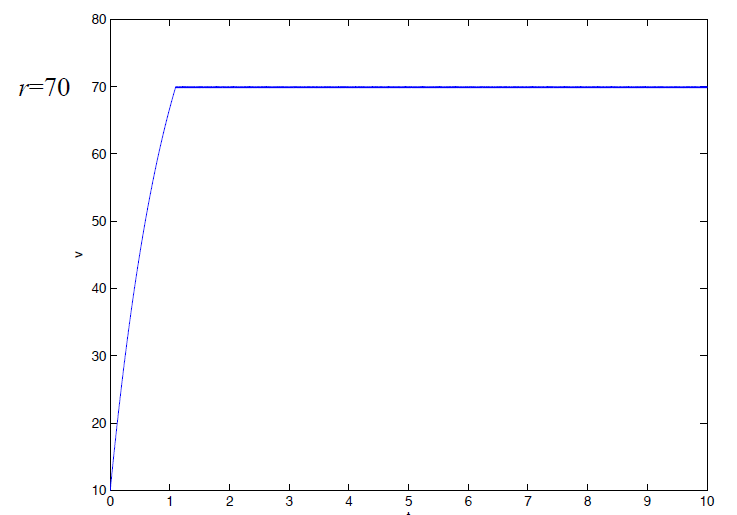
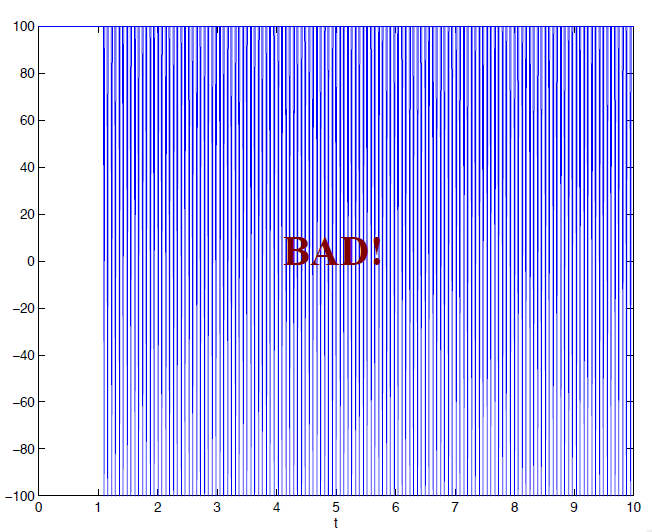
结果是能到参考速度,但是,控制量在最高和最低点再短时间内一直横跳。这个不平滑,不是理想的控制方法。
Attempt 2: P-regulator (P控制器)
u = ke
误差越小,控制量也越小,符合直观认知。
实际效果图如下:
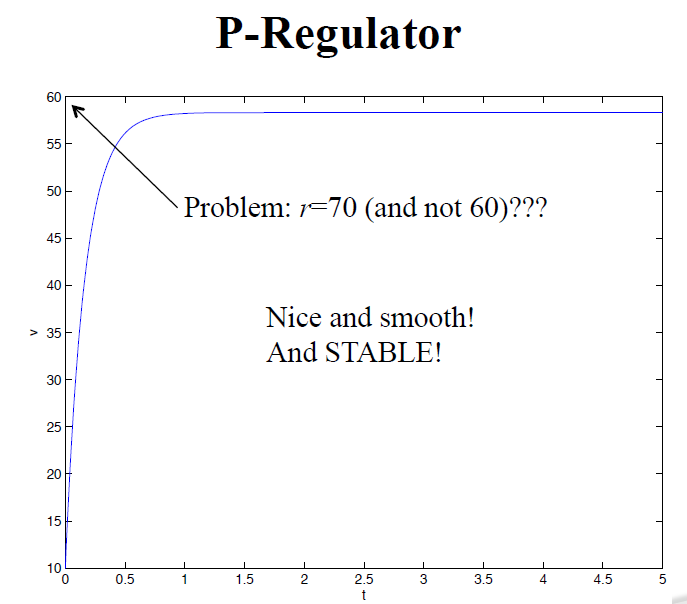
速度以平滑,稳定的到60左右,但是参考速度是70. (关于P控制器为什么到不了参考值,PPT有证明过程)
Attempt 3: PID controller

PID 是应用最广泛的底层控制器。通常按照经验选择三个系数Kp, Ki, Kd。 该控制器的结果符合平滑,稳定的要求且能够到达参考值。
总结
首先,介绍了系统的建模(状态,控制,动力学),之后对动力学的预测模型的推导,通过Car model来距离,关于car model的稳定速度控制问题,设计了bang bang controller,p-controller和PID controller,分析了结果。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号