SimData:基于aiSim的高保真虚拟数据集生成方案
一、前言
在自动驾驶感知系统的研发过程中,模型的性能高度依赖于大规模、高质量的感知数据集。目前业界常用的数据集包括 KITTI、nuScenes、Waymo Open Dataset 等,它们为自动驾驶算法的发展奠定了重要基础。
然而,构建真实世界的感知数据集并非易事——不仅需要投入大量人力、物力与时间成本,还需要面对数据采集受限、隐私合规、标注耗时以及极端场景(corner case)难以获取等诸多挑战。
在此背景下,高保真虚拟数据集正成为自动驾驶感知算法研究的新方向。通过仿真平台生成的虚拟数据,不仅能够快速扩充数据规模,还可灵活构造复杂路况、恶劣天气及罕见事件,为模型提供更全面的训练样本。
基于此,康谋推出了全新的高保真虚拟数据集——SimData。SimData依托aiSim的高精度物理建模与逼真视觉渲染能力,能够生成多传感器同步数据(包括相机、激光雷达、雷达、IMU 等),实现与真实世界数据一致的多模态特性。SimData数据结构严格遵循nuScenes数据集格式规范,可直接使用官方nuscenes-devkit工具解析和可视化,大幅降低开发者上手成本。
本文将介绍SimData的核心特性与构建流程,并展示其在典型感知任务中的表现。SimData 正式版及相关对比测试报告将于近期发布,敬请持续关注康谋的最新动态。
二、SimData构建过程
1、传感器布局
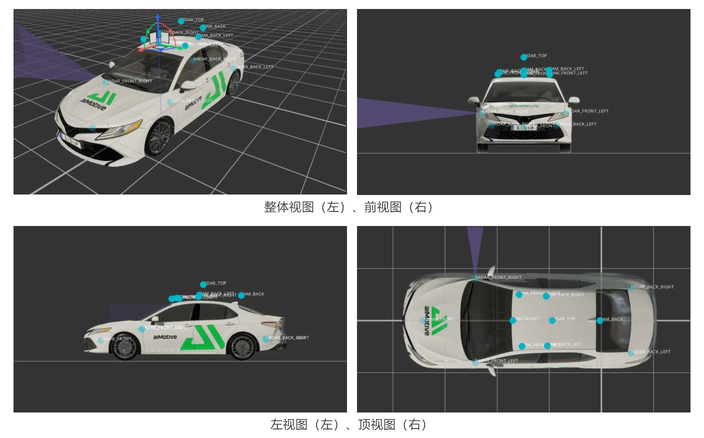
在 aiSim 仿真平台中,我们严格复现了 nuScenes 数据集的传感器布局,以确保数据结构和多模态同步特性的一致性。 仿真车辆共配置了 6 路环视相机、5 个雷达(Radar)、1 个激光雷达(LiDAR)、1 个惯性测量单元(IMU)以及 1 个定位系统(GPS)。 其中,相机与雷达的采样频率均为 40 Hz,激光雷达的采样频率为 80 Hz,能够满足高时序精度的多传感器同步采集需求。 各传感器的空间布设与朝向如下图所示。
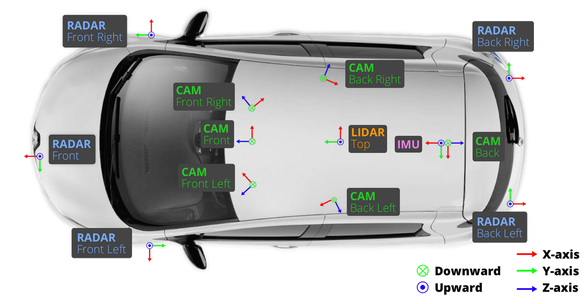
与 nuScenes 不同的是,SimData 中所有传感器均采用 FLU(Forward–Left–Up) 坐标系,而在 nuScenes 数据集中,相机传感器使用的是 RDF(Right–Down–Forward) 坐标系。 在数据构建过程中,我们对所有标注文件进行了严格的坐标系转换与对齐处理,确保坐标定义在逻辑上与 nuScenes 完全一致。
因此,用户在使用 SimData 时,无需额外关注坐标差异,其数据解析与开发体验与 nuScenes 保持一致。 下图展示了 nuScenes 中各传感器的典型布局及其坐标系定义。
2、数据结构
SimData 数据集在结构设计上与 nuScenes 完全保持一致。对于已经熟悉 nuScenes 的开发者而言,无需额外的适配或学习成本,即可快速上手 SimData 的使用与解析。 下图展示了 SimData 数据集的整体目录结构,nuScenes 同样遵循这一组织形式,以实现无缝兼容与工具级互通。

具体说明如下:
(1)maps文件夹
-
存放数据集中使用到的所有高精地图图像文件,用于提供地理位置信息和场景背景参考。
(2)samples文件夹
存放各类传感器的关键帧数据,包括:
-
6 路摄像头图像(.jpg文件)
-
5 路雷达点云(.pcd文件)
-
1 路激光雷达点云(.bin文件)
其中,每隔0.5 秒抽取一帧数据作为关键帧进行保存。
(3)sweeps文件夹
保存除关键帧以外的连续传感器数据,用于构建时序信息和多帧融合任务。
(4)v1.0-*文件夹
存放传感器的标注与元数据信息,所有文件均以.json格式保存,涵盖时间戳、姿态参数、标注标签、场景描述等内容。
各个json标注文件的关系网络也与nuScenes数据集保持一致,这里以nuScenes官方文件结构图进行说明。

在 SimData 数据集中,每个文件中的信息块均通过一个全局唯一的 UUID(Universally Unique Identifier) 作为 token 进行标识。
这些 token 构成了数据集中不同信息之间的关联桥梁,用户可通过 sample.json、sample_data.json 和 sample_annotation.json三个核心文件获取绝大多数标注与结构化信息。
(1)sample.json
sample.json文件记录了关键帧(Keyframe)的基础信息。
-
每个关键帧都对应一个sample_token,用于唯一标识该帧数据。
-
通过scene_token可在scene.json文件中查找到该样本所属的场景。
-
文件中还提供了 前一帧 (prev) 与 后一帧 (next) 的token,可用于构建连续帧关系。
(2)sample_data.json
利用sample_token可在sample_data.json 中获取对应帧的多传感器数据详情,包括:
-
ego_pose_token:车辆自车位姿的引用,可在 ego_pose.json 中获得该时刻的位姿信息(位置与朝向)。
-
calibrated_sensor_token:对应传感器的标定参数,可在 calibrated_sensor.json 中查询到该传感器的内参与外参信息。
-
filename:传感器原始数据的文件路径。若为相机数据,还包含图像的高度(height)与宽度(width)。
-
timestamp:时间戳(单位:微秒),用于多传感器时间同步。
-
is_key_frame:布尔值,指示该帧是否为关键帧。
-
next / prev:分别指向下一帧和前一帧的 token,实现时序关联。
(3)sample_annotation.json
sample_annotation.json文件记录了每个关键帧中检测到的目标物体信息,可通过 sample_token 进行关联。 包含的主要字段如下:
-
a. instance_token:目标实例的唯一标识。
-
可在 instance.json 中查询到该实例对应的 category_token(类别信息)、首次与最后出现的关键帧 token。
-
通过 category_token 可进一步在 category.json 中获取该实例的具体类别名称。
-
b. visibility_token:可见度等级标识(共四级,数值越大表示可见度越高),其定义可在 visibility.json 中查阅。
-
c. 目标的几何与姿态信息:包括
-
中心点位置 (translation)
-
尺寸大小 (size)
-
旋转角度 (rotation),以 四元数(Quaternion) 形式存储 这些位姿均定义在传感器坐标系下。
-
d. 点云统计信息:检测框中包含的 激光雷达点数 (num_lidar_pts) 与 雷达点数 (num_radar_pts)。
-
e. 前后帧关联:分别记录该实例在前一帧与后一帧中的对应 token。
三、SimData的使用方法与感知模型使用示例
1、使用方法与真值可视化
SimData可以直接使用nuScenes-devkit进行解析,使用方法与nuScenes数据集一致。
示例:
from nuscenes.nuscenes import NuScenes
nusc = NuScenes(version='v1.0-custom', dataroot=data_path, verbose=True)
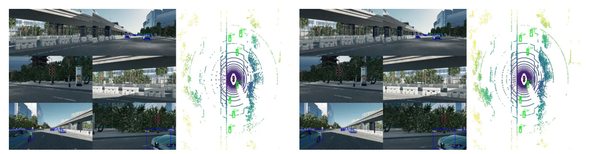
得到示例化对象后便可以使用nuScenes官方提供的工具对SimData进行分析和模型训练。配合cv2或matplotlib可以对数据集进行可视化:
-
同步lidar点云,可以同时绘制出bev视角下的标注信息
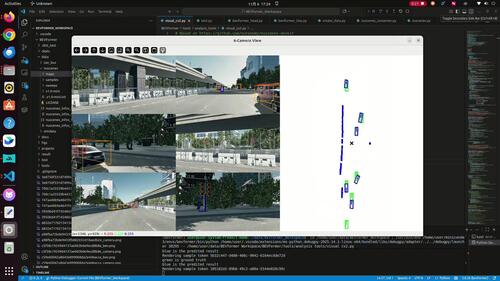
2、bevformer检测效果展示
以下是使用在nuScenes数据集下训练的权重,采用bevformer-tiny模型直接进行检测的效果(即没有在SimData上进行训练)。
bevformer官方代码库:https://github.com/fundamentalvision/BEVFormer/tree/master
bevformer论文:https://arxiv.org/pdf/2203.17270
四、总结
本文阐述了虚拟数据集在自动驾驶感知研究中的重要性,并介绍了基于 aiSim 仿真平台生成的高保真虚拟感知数据集——SimData。 文章详细说明了 SimData 的数据组成结构与使用方法,并利用开源感知模型对其进行了检测验证,从而验证了数据集的可用性与有效性。
后续,康谋团队将发布更为详尽的测试与对比报告,以进一步验证 SimData 与真实数据集之间的高一致性。通过这一系列工作,我们不仅证明了 aiSim 仿真环境的高保真特性,也为研究者与开发者提供了一个高质量、易用且可扩展的虚拟感知数据资源,以持续助力自动驾驶感知算法的研究与训练。
敬请关注康谋后续的正式版虚拟数据集发布。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号