【科学计算】数值积分
数值积分法
在计算数学中,不可避免地需要对函数在给定区间上求定积分。即计算
\[\int_{a}^{b}f(x)\mathrm{d}x. \]根据定积分的定义,定积分是积分上和与积分下和共同极限,因此只要函数可积,且区间被拆分得足够细小,那么积分就可以近似表示为
\[\int_{a}^{b} f(x)\mathrm{d}x=\lim_{n\to \infty}\sum_{i=1}^{n}\frac{b-a}{n}\cdot f(a+\frac{b-a}{n}i). \]因此,如果我们知道函数在足够多的\(n\)个点处的取值,就可以用积分的定义近似计算其数值积分。不过这样做的缺点是运算量大,且误差难以估计。本文要介绍的Newton-Cotes积分和Gauss积分法,是两种常用的数值积分方法。
一、Newton-Cotes公式积分
利用Newton-Cotes公式对函数进行积分,是基于之前我们说过的插值理论的。在插值理论中我们说过,如果已知函数在不同的\(n+1\)个点处的取值,就可以构造一个\(n\)次多项式作为原函数的近似。而多项式的积分是很容易计算的,这样就简化了定积分的计算。
为方便接下来的讨论,先回顾插值理论中的一些结果,设\(\omega(x)=\prod_{i=0}^{n}(x-x_i)\)。
首先,过\(n+1\)个不同的节点给出的插值多项式是唯一的,利用Lagrange插值基函数可以给出过\(x_0,x_1,\cdots,x_n\)点的插值函数为
对任何\(x\in [a,b]\),用\(P_n(x)\)作为\(f(x)\)的近似的误差估计是
特别当\(n=1\)时和\(n=2\)时,有
简单情形:梯形积分公式与抛物线积分公式
梯形积分公式基于两个点:\((a,f(a))\)和\((b,f(b))\),利用这两个点构造出的插值多项式最简单,是一条直线,可以很容易地写出其表达式:
对其进行积分,就得到
直观上来看,这就是以\((a,f(a))\)和\((b,f(b))\)到\(x\)轴的线段为平行边围成的梯形的面积,因而将这个求积公式叫做梯形求积公式,它是插值多项式积分的最简单情形。
如果我们需要稍复杂一些,增加一个点,最好的选择是增加\(a,b\)的中点。此时,插值多项式是一个二次多项式,即一条抛物线,可以写出其表达式为:
对其进行积分,得到的结果是
如果对比梯形求积公式,会发现,它们共同的特点是:都包含\((b-a)\)这一项,同时另一个因子都是函数值的加权平均。如果将插值多项式推广到更高的阶数,是否仍有这样的结论?下一Part的结论将给出肯定的答复。
Newton-Cotes公式
这一部分的内容,就是对梯形求积公式和抛物线求积公式的一个推广,它的要求是:在\([a,b]\)上选择的分点是等间距的,即
(下面的推导过程可以略看,与计算过程无关)根据前言部分的结论,我们有
于是
令
则有
下面要计算\(A_i\),就要用到节点等间距的要求,用\(a+ih\)替代\(x_i\),并令\(x=a+th\),这样\(t\)就在\([0,n]\)中连续取值,并且
代入就得到
(略看部分结束)观察\(A_i\)式,会发现\((nh)\)就是区间长度\(b-a\),再令剩余部分为\(c_{i}^{(n)}\),就得到积分式为:
当然,\(c_i^{(n)}\)的计算有一些繁琐,但是注意到\(c_i^{(n)}\)的表达式中只有\(n,i\)而没有\(h\),这就说明\(c_i^{(n)}\)的计算不依赖于区间,只依赖于节点个数与节点的排位,因此可以事先计算出来以供查阅。这样\(c_i^{(n)}\)被称为Newton-Cotes系数,有表如下:
可以发现,当\(n\le 7\)时所有的\(c_{i}^{(n)}\)都是正数,而当\(n\ge 8\)时Cotes系数出现了负数,这是我们不使用过多结点进行Newton-Cotes公式计算数值积分的原因,因为出现了负数会导致误差估计难以确定,这是我们下一Part将讨论的内容。
现在我们用Cotes公式计算\(\sin x^2\)在\([-1,1]\)上的积分,不妨取\(n=2\)和\(n=3\),插值多项式的图示如下(黑色为原函数,红色为插值多项式):
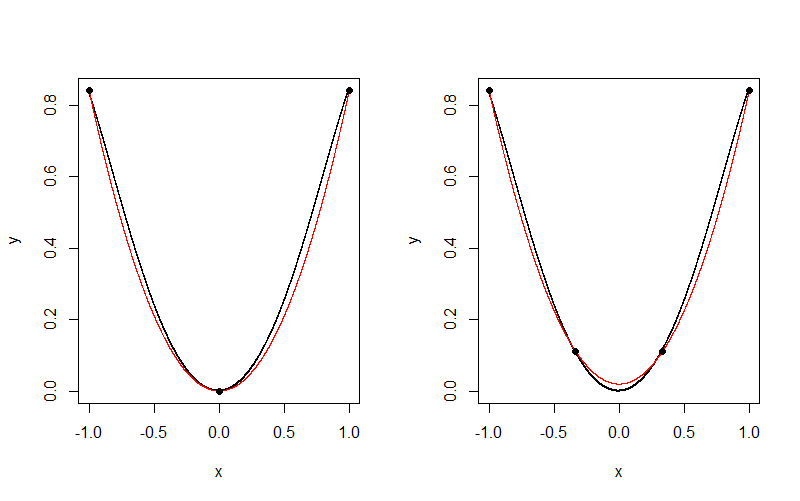
当\(n=2\)时,计算得
\[\int_{-1}^{1}\sin(x^2)\mathrm{d}x\approx 2\left[\frac{1}{6}\sin (-1)^2+\frac{4}{6}\sin(0)^2+\frac{1}{6}\sin(1^2) \right]=0.5609807, \]当\(n=3\)时,计算得
\[\int_{-1}^{1}\sin(x^2)\mathrm{d}x\approx 2\left[\frac{1}{8}\sin(-1)^2+\frac{3}{8}\sin(-\frac{1}{3})^2+\frac{3}{8}\sin(\frac{1}{3})^2+\frac{1}{8}\sin 1^2 \right]=0.5870594. \]而积分的更精确值是\(0.6205366\),从图上也可以看出红色线要比黑色线普遍低一些,这代表对于此函数,Newton-Cotes公式积分的结果会比精确值低。此时,如果选择\(n=1\),结果会怎样?
误差分析
首先,在使用Newton-Cotes公式计算积分时,常常不会选择太多的节点,因为\(n\ge 8\)时,Cotes系数可能会出现负数。为什么对于负数Cotes系数时一般不选择,这是考虑到计算\(f(x_i)\)时可能出现的偏误。一般说来,即便\(f\)已知,计算\(f(x_i)\)也会有一定的舍入误差、截断误差等,这一般会有一定的绝对误差限\(\varepsilon\),不妨假设计算出来的有误差的值为\(\tilde f(x_i)\)。如果Cotes系数全是正数,那么结合\(\sum_i c_i^{(n)}=1\),有
这使得误差处于可以控制的范围内,这个性质称为数值稳定性。如果Cotes系数存在负数,这个纯由计算误差导致的误差就可能变得难以控制。
在讨论误差估计之前,先回顾一下积分中值定理。
积分中值定理:若函数\(f(x)\)、\(g(x)\)在闭区间\([a,b]\)上连续,且\(g(x)\)在\([a,b]\)上不变号,则存在一点\(\varepsilon\in[a,b]\),使得
\[\int_{a}^{b}f(x)g(x)\mathrm{d}x=f(\varepsilon)\int_{a}^{b}g(x)\mathrm{d}x. \]
现在,我们讨论Newton-Cotes公式的误差估计,方便起见,我们只讨论比较简单的梯形公式与抛物线公式。首先对于梯形求积公式,有如下的定理:若\(f(x)\in C^{2}[a,b]\),则梯形求积公式有误差估计
显然
\[\begin{aligned} R(f)&=\int_{a}^{b}[f(x)-P_1(x)]\mathrm{d}x\\ &=\int_{a}^{b} R_1(x)\mathrm{d}x\\ &=\int_{a}^{b}\frac{f^{(2)}(\xi)}{2}(x-a)(x-b)\mathrm{d}x. \end{aligned} \]要注意,这里\(\xi\)是\(x\)的函数\(\xi(x)\),所以不能贸然将其提到积分限以外,而应运用积分中值定理,因\((x-a)(x-b)\)在\([a,b]\)上非正,有
\[\int_{a}^{b}\frac{f^{(2)}(\xi(x))}{2}(x-a)(x-b)\mathrm{d}x=\frac{f^{(2)}(\eta)}{2}\int_{a}^{b}(x-a)(x-b)\mathrm{d}x. \]对于下面的积分,我们常用以下变换:\(x=a+th\),\(h=\frac{b-a}{n}\)。这里\(n=1\),所以
\[\int_{a}^{b}(x-a)(x-b)\mathrm{d}x=h^3\int_{0}^{1}t(t-1)\mathrm{d}t=-\frac{(b-a)^3}{6}, \]所以
\[R(f)=-\frac{(b-a)^3f^{(2)}(\eta)}{12}. \]
对于抛物线求积公式,有与梯形求积公式类似的、但又有所不同的误差估计:若\(f(x)\in C^4[a,b]\),则
这是因为此时\(n\)为偶数。这里的证明,需要在下一部分给出代数精度这一概念时才能给出。
复化求积与逐次分半
在插值理论中,我们知道存在某些函数,即使节点无限加密,也难以对原始函数很好的拟合(尤其是负次数函数),即Runge现象。为了克服Runge现象,往往使用分段插值以缩小误差。同理,如果拟合效果差,用多项式代替求积分的效果也自然不好,我们可能也会对分段插值得到的分段函数进行分段求积,这便是复化求积公式。
这里不对复化梯形公式与复化抛物线求积公式过多介绍,直接给出公式。对于梯形求积公式,把\([a,b]\)区间\(n\)等分后得到的节点\(x_k=a+kh\),有
对于抛物线求积公式,把\([a,b]\)区间\(2n\)等分后得到的节点为\(x_k=a+kh\),这里\(h=(b-a)/2n\),于是
其误差估计为:
对于梯形求积公式,有
\[\begin{aligned} R(f,T_n)&=\sum_{k=0}^{n-1}\left(-\frac{h^3}{12}f^{(2)}(\eta_k) \right),\quad \eta_k\in(x_{k},x_{k+1})\\ &=-\frac{h^3}{12}\sum_{k=0}^{n-1}f^{(2)}(\eta_k)\\ &=-\frac{h^3}{12}nf^{(2)}(\eta),\quad \eta\in(a,b)\\ &=-\frac{b-a}{12}h^2f^{(2)}(\eta). \end{aligned} \]这里第三个等号是因为\(f^{(2)}(x)\)作为连续函数的性质。
对于抛物线求积公式,有
\[\begin{aligned} R(f,S_n)&=\sum_{k=0}^{n-1}\left(-\frac{(2h)^5}{2880}f^{(4)}(\eta_k) \right),\quad \eta_k\in(x_k,x_{k+1})\\ &=-\frac{(2h)^5}{2880}\sum_{k=0}^{n-1}f^{(4)}(\eta_k)\\ &=-\frac{2h^5}{180}nf^{(4)}(\eta),\quad \eta\in(a,b)\\ &=-\frac{b-a}{180}h^{4}f^{(4)}(\eta). \end{aligned} \]
接下来介绍逐次分半法,它是一种计算复化求积的方式。虽然有了梯形求积公式的误差估计,但是这是一种事前估计,即为了达到我们预期的误差限,往往会选择超过实际所需非常多的节点,这是一种计算量上的浪费。而逐次分半法,每次对节点加密一倍,从而获得更精确的积分结果,这样将得到一个积分数列\(T_1,T_2,T_4,\cdots\),当相邻两个积分结果小于一定值时,就不继续计算,将最终结果作为返回值。
逐次分半法还有一个显著优点是,重复的节点不需要重复计算。不妨设将\([a,b]\)四等分,节点是\(a,x_1,x_2,x_3,b\),看下面的计算过程:
在这样的计算过程下,重复的结点没有加入计算,所以每次只需要计算新加入的节点即可。
一般将停步的定值(即最终相邻两个积分值的差)设定为\(3\varepsilon\),\(\varepsilon\)是误差限。
二、代数精度
在Newton-Cotes公式中,最终将求积公式的形式表现为
这也是我们要介绍的求积公式的一般形式,注意各个\(A_i\)是不依赖于被积函数\(f\)的。这里介绍代数精度概念,一方面是作为评判的标准,另一方面是为下面Gauss求积公式做准备。
代数精度的定义
前面所叙述的求积,都是以某种方式将被积函数\(f(x)\)用\(n\)次多项式\(P_n(x)\)代替,对多项式求积。特别在Newton-Cotes公式求积分时,使用的是插值多项式,而我们知道如果\(f(x)\)是不高于\(n\)次的多项式,则\(P_n(x)\equiv f(x)\),这时候积分的结果是精确的;但如果\(f(x)\)是高于\(n\)次的多项式,那么\(f^{(n+1)}(x)\)不会恒等于\(0\),用\(P_n(x)\)替代\(f(x)\)求积分就会存在误差。代数精度这个概念,就是用来表征某种积分法是相当于用几次多项式来替代求积的。
现给出代数精度的定义。对一个一般求积公式
其中\(A_k\)是不依赖于函数\(f(x)\)的常数。如果求积公式中的\(f(x)\)是任意一个次数不高于\(m\)次多项式时,求积公式的约等号可改为精确成立的等号,但存在\(m+1\)次多项式\(f(x)\)使求积公式不能精确成立,就称求积公式具有\(m\)次代数精度。
Newton-Cotes公式的代数精度
在引入Gauss求积公式之前,先对Newton-Cotes公式的代数精度进行讨论。
由于Newton-Cotes公式使用\(n\)次插值多项式进行替代求值,所以对于有\(n+1\)个节点\(x_0,x_1,\cdots,x_n\)的Cotes公式,Newton-Cotes求积至少应当具有\(n\)次代数精度,因为当\(f(x)\in\mathcal P_n(\mathbb{R})\)时\(f(x)\equiv P_n(x)\)。比如,梯形求积公式对于一次函数的积分是精确的,而抛物线求积公式对于二次函数的积分也是精确的。
但值得注意的是,Newton-Cotes公式对于\(n\)为偶数的情形,可以具有\(n+1\)次代数精度。
记任意\(n+1\)次多项式为
\[q_{n+1}(x)=\sum_{k=0}^{n+1}b_{k}x^{k},\quad q_{n+1}^{(n+1)}(x)=(n+1)!b_{n+1}, \]用\(P_n(x)\)代表其\(n\)次插值多项式,于是其误差为
\[R_n(x)=\frac{q_{n+1}^{(n+1)}(\xi)}{(n+1)!}\omega_n(x)=b_{n+1}\omega_n(x), \]在前面,我们已经得到了这样的结果:
\[\int_{a}^{b}\omega_n(x)\mathrm{d}x=h^{n+2}\int_{0}^{n}t(t-1)\cdots(t-n)\mathrm{d}t, \]接下来的目标是证明上面的积分为\(0\),这样就代表用\(P_n(x)\)替代\(q_{n+1}(x)\)的积分是精确的。令\(n=2k\)并引进变换\(u=t-k\),有
\[\begin{aligned} &\quad \int_{0}^{n}t(t-1)\cdots(t-n)\mathrm{d}t\\ &=\int_{0}^{2k}t(t-1)\cdots(t-k)(t-k-1)\cdots(t-2k+1)(t-2k)\mathrm{d}t\\ &=\int_{k}^{k}(u+k)(u+k-1)\cdots u(u-1)\cdots(u-k-1)(u-k)\mathrm{d}u, \end{aligned} \]令积分号里面的部分为\(H(u)\),即\(H(u)=(u+k)\cdots u(u-1)\cdots(u-k)\),有
\[\begin{aligned} H(-u)&=(-u+k)(-u+k+1)\cdots(-u)(-u-1)\cdots(-u-k) \\ &=(-1)^{2k+1}H(u)\\ &=-H(u), \end{aligned} \]从而\(H(u)\)是一个奇函数,这说明积分结果是\(0\),所以
\[\int_{a}^{b}\omega_n(x)\mathrm{d}x=0, \]即\(P_n(x)\)代替\(q_{n+1}(x)\)使用Newton-Cotes求积公式是精确的。
证明抛物线公式的误差估计
之前,我们给出了梯形求积公式与抛物线求积公式的误差估计,并证明了梯形求积公式的误差估计,但没有给出抛物线公式的误差估计。这是因为抛物线求积公式具有三次代数精度,这使得它可以用更高次的插值多项式逼近。
再回顾抛物线公式的误差估计:
由于可以构造三次多项式,故除了\(f(a),f(\frac{a+b}{2}),f(b)\)以外,还可以增加一个条件,这里选择的是\(f'(\frac{a+b}{2})\)。利用Newton插值法,可知\(f'(\frac{a+b}{2})\)实际上是在\((\frac{a+b}{2})\)处选择了重节点。
构造一个三次插值多项式\(P_3(x)\)满足
\[P_3(a)=f(a),\quad P_3(b)=f(b),\\ P_3\left(\frac{a+b}{2} \right)=f\left(\frac{a+b}{2} \right),\\ P_3'\left(\frac{a+b}{2} \right)=f'\left(\frac{a+b}{2} \right). \]从而插值函数的误差是
\[f(x)-P_3(x)=\frac{f^{(4)}(\xi(x))}{4!}(x-a)\left(x-\frac{a+b}{2} \right)^2(x-b), \]易知后面的部分在\([a,b]\)上不变号。积分,由积分中值定理,并引入变换\(x=a+t(b-a)\),就有
\[\begin{aligned} &\quad \int_{a}^{b}\frac{f^{(4)}(\xi(x))}{4!}(x-a)\left(x-\frac{a+b}{2} \right)^2(x-b)\mathrm{d}x\\ &=\frac{f^{(4)}(\eta)}{4!}\int_{a}^{b}(x-a)\left(x-\frac{a+b}{2} \right)^2(x-b)\mathrm{d}x\\ &=\frac{(b-a)^5f^{(4)}(\eta)}{4!}\int_0^1 t\left(t-\frac{1}{2}\right)^2 (t-1)\mathrm{d}t\\ &=-\frac{(b-a)^5f^{(4)}(\eta)}{4!\cdot 120}. \end{aligned} \]容易计算最后一个积分值为\(-1/120\),且\(4!\cdot 120=2880\),故结论得证。
三、Gauss求积公式
Gauss型求积公式是对Newton-Cotes求积公式的改进。Newton-Cotes求积公式基于插值多项式推出,选择了最方便的等距节点,并且根据\(A_i\)中与区间无关的部分编制了Cotes系数表,从而使计算变得方便。
Gauss型求积公式则是为了更精确的积分结果,选择更复杂的节点与对应的系数\(A_i\)。如何获得更精确的积分结果,就是我们接下来需要考虑的问题。
Gauss求积的目标
先明确Gauss型求积公式的目标:在节点数\(n\)给定时,最大化代数精度。要最大化代数精度,首先就要知道代数精度最高能达到多少,这就成为一个规划问题:
写出\(m\)次多项式的一般形式:
于是
这里\(\int_{a}^{b}x_i\mathrm{d}x\)是定值,故使用\(\mu_i\)替代,从而我们得到一个等式:
注意这个等式中的几个量:
- \(a_i\)是任意实数。因为一组\(a_i\)唯一决定一个\(q_m(x)\),所以\(a_i\)任意取值等式都应该成立。
- \(\mu_i\)是定值。因为\(\mu_i=\int_{a}^{b}x^{i}\mathrm{d}x\)。
- \(A_k\)和\(x_k\)是待取的定值,即取一组\(A_k,x_k\)使得对任何\(a_i\)都有等式成立。
由于\(a_i\)是任意实数,所以可以将等式展开成方程组:\(\mu_i=\sum_{k=1}^{n}A_kx_{k}^{i},i=0,1,\cdots,m\),即
因未知数个数为\(2n\),为使这个方程组成立,必有\(m\le 2n-1\),且如果存在一组\(A_k,x_k\)使得\(m=2n-1\),则\(2n-1\)就是\(n\)个互异节点能达到的最大代数精度。事实上,这样的\(A_k,x_k\)必定是可以取到的。
接下来讨论如何选择节点,即解上面的非线性方程组。为方便起见,我们将定积分的上下限控制为\([-1,1]\),这样有
因为我们假定\(q(x)\)是\(2n-1\)次多项式,所以用一个含\(x_1,\cdots,x_n\)的\(n\)次多项式,这里就取为\(\omega(x)=\prod_{i=1}^{n}(x-x_i)\)去除\(q(x)\),就有
这里多项式除法的存在唯一性保证了\(p(x),r(x)\)都是唯一的\(n-1\)次多项式,且
现在,最关键的一步在于,我们希望对任何不超过\(n-1\)次的多项式\(p(x)\),都有
这等价于以下\(n\)个算式:
一般从中解出\(x_1,x_2,\cdots,x_n\)的值,可以达到降维的效果,求解难度也大幅下降;并且,从这里可以看出,\(x_1,\cdots,x_n\)的值是不依赖于函数\(f\)的。这时候
再利用求积公式对\(f(x)=x^{i}\),\(i=0,1,\cdots,n-1\)精确成立,代入已经求得的\(x_1,\cdots,x_n\)的值,就可以解出\(A_1,\cdots,A_n\)。事实上,可以解得
这相当于把一个\(2n\)个未知数的非线性方程,转化成一个含\(n\)个未知数的非线性方程和一个\(n\)个未知数的线性方程组求解。
Gauss-Legendre求积公式
在之前的讨论中,我们使用\(\omega(x)\),利用\(x^{i}\omega(x)\)的积分在\([-1,1]\)上为\(0\)来求解\(x_1,\cdots,x_n\)。而Gauss-Legendre求积公式,则将\(\omega(x)\)与Legendre多项式建立联系来作为除函数,这样做的好处是,对任何\(i=0,1,\cdots,n-1\),因Legendre多项式的性质都有
由Legendre多项式的性质,如果取它的\(n\)个零点作为\(x_1,\cdots,x_n\),则
并且
这些系数被制成表,需要使用时可以直接查阅。
在实际应用Gauss-Legendre公式求积时,一般步骤是先将其作积分限变换转化为\([-1,1]\)上的积分,再根据公式代入求解。
现使用Gauss-Legendre公式计算\(\sin(x^2)\)在\([-1,1]\)上的积分,之前已经计算过其积分的准确值大约是\(0.6205366\)。当\(n=4\)时,有
\[\int_{-1}^{1}\sin (x^2)\mathrm{d}x\approx \sum_{k=1}^{4}A_k\sin(x_k^2)=0.6203309. \]相比Newton-Cotes公式得到的结果,Gauss-Legendre积分显然更为精确。
尽管Gauss-Legendre求积有着更高的精度,但是随着\(n\)的增大,节点\(x_k\)的变化并没有什么规律,所以\(f(x_k)\)的值不能重复利用。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号