


电机控制方案
技术框架
|
技术
|
定位
|
通信方式
|
控制层级
|
使用场景
|
实时性
|
|
GRBL
|
数控系统
|
串口(G代码)
|
开环/闭环
|
CNC/3D打印
|
中等
|
|
EtherCAT
|
工业总线协议(大型、多轴、高同步性的)
|
以太网
|
多轴同步
|
工业自动化
|
极高
|
|
伺服驱动器
|
CAN-FD
|
单轴高精度
|
机器人/精密控制
|
高
|
|
|
USB / UART / CAN
|
|||||
| 面向 Arduino/STM32 的轻量级 FOC 库,极易上手 | |||||
|
ROS/ROS2
|
机器人框架
|
网络/IPC
|
系统级集成
|
机器人研发
|
低-中
|
1 echcat:EtherCAT (Ethernet Control Automation Technology) 是由德国倍福公司在2003年提出的工业以太网技术,具有很高的实时性.
EtherCAT使用标准的IEEE802.3以太网帧,单从以太网角度看,EtherCAT是二层网络,常说的MAC层,以太网帧头使用以太网类型0x88A4来和其他以太网帧相区别。所以在EtherCAT主站中通常可以在以太网驱动层通过数据帧头识别,分离出TCPIP数据帧和EtherCAT数据帧,实现TCPIP协议栈和EtherCAT协议栈共同使用。
EtherCAT在伺服电机控制器上的应用中通常是基于CANopen的CiA402标准规范。这套配置文件规范标准化了伺服驱动器、变频器和步进电机控制器的功能行为。在EtherCAT中,通常被称为COE(CANopen Over EtherCAT)。COE中定义了状态机,控制字,状态字,参数值,它们映射到过程数据对象(PDO)配置文件已经在IEC 61800-7系列规范中进行了部分国际化标准.

开源主站主要就两种,SOEM和IGH,IGH只支持linux.
EtherKit是RT-Thread联合瑞萨电子推出的一款高性能、多功能以太网MPU开发板,采用瑞萨电子RZ/N2L芯片,搭载Arm® Cortex®-R52内核,主频高达400 MHz;支持TSN的3端口千兆以太网端口;支持EtherCAT、PROFINET RT/IRT、EtherNet/IP™、Modbus、OPC UA等主流工业以太网通信协议.
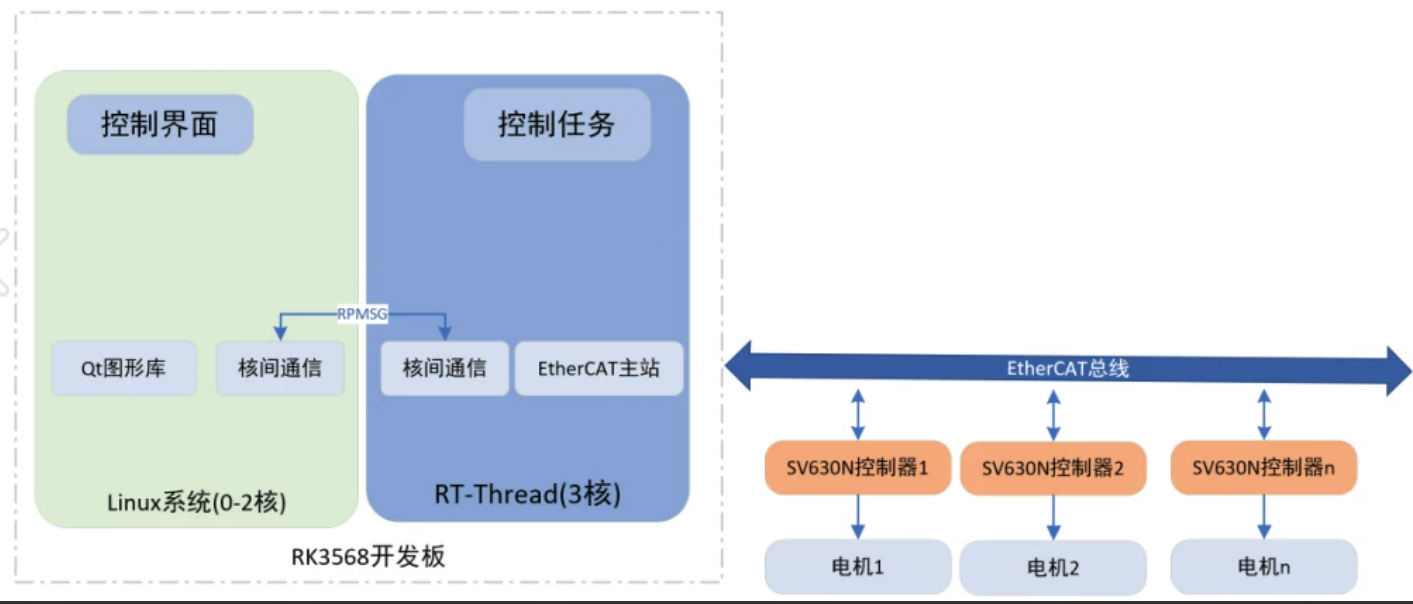
瑞芯微 RK3568平台上实现 EtherCAT 主站控制汇川 SV630ND 伺服驱动电机《基于 RT-Thread专业版的EtherCAT主站方案》
STM32 生态中的 EtherCAT 从站参考设计
2 Thor:《Thor:一款白菜价的开源工业级6关节机械臂,重复定位精度±0.1mm》低成功全开源:从3D建模的FreeCAD源文件,到控制板的KiCAD设计,全部开放。连固件都给了你GRBL和RRF两种选择。
3 GRBL:CNC和3D打印,G代码控制。轻量级G代码解释器,适合简单CNC/3D打印;
4 RRF(RepRapFirmware):
是一种开源的、功能强大的3D打印机和CNC控制器固件,最初为RepRap项目开发,现已广泛应用于多种高性能3D打印机和运动控制平台(如Duet系列控制器)。与GRBL相比,RRF 的主要特点包括:
- 支持多轴协调运动:能更精细地处理多轴联动(如5轴或6轴CNC),适用于复杂轨迹。
- 内置S形加减速规划:原生支持平滑的S曲线轮廓,可有效减少振动和过冲,提升运动柔顺性。
- 高级运动控制:具备实时路径插补、力矩控制、编码器反馈闭环、温度与传感器联动等复杂功能。
- 可配置性强:通过配置文件(.cfg)而非硬编码实现设备参数和运动逻辑,便于定制。
- 网络与远程控制:原生支持Web界面、TCP/IP通信,便于远程监控与调试。
- 支持多种硬件平台:不仅限于STM32,还支持多种ARM Cortex-M微控制器
RRF的姊妹项目 DCS (Duet Control Server) 也值得关注,它负责处理G代码解析和上层控制逻辑,与固件通过CAN通信,可实现更灵活的系统架构.
5 ros/ros2:机器人控制框架。
56moteus: 主要用于四足机器人(quadrupedal robot)和高性能无刷伺服控制应用(本质是完整的伺服驱动器(含 MCU + 功率电路 + 控制算法)
-
moteus 提供了从 FOC(磁场定向控制)、电流/速度/位置三环控制、CAN 总线通信、到状态机和故障保护的完整实现,代码结构清晰。
-
实时性与效率优化
基于 STM32G4(带 FPU 和 CORDIC),利用硬件加速实现高效 FOC,适合学习如何在资源受限的 MCU 上实现高性能控制。 -
通信协议设计
使用自定义的 CAN-based 通信协议(moteus 协议),支持多节点同步、遥测数据流、参数动态配置,对构建机器人分布式控制系统很有启发。 -
调试与工具链完整
配套的moteus_tool、GUI、moteus_python库等,展示了如何构建开发者友好的调试生态,提供基于名称的寄存器访问功能,通过逻辑树结构组织,并具备实时遥测数据绘图能力。 -
开源且许可证友好(Apache 2.0)
可自由学习、修改、商用,适合深度研究。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号