


CAN总线学习
CAN/CANopen 开发全栈指南:从理论到工业实践
📅 更新日期:2025年11月25日
🎯 适用对象:嵌入式工程师、机器人开发者、工业自动化工程师
💡 核心价值:掌握 CAN/CAN FD + CANopen 全栈开发能力,构建高可靠工业通信系统
🔑 一、核心定位:CANopen 之于 CAN,正如 Modbus 之于 RS-485
|
协议层
|
物理层
|
应用特点
|
|---|---|---|
|
Modbus RTU
|
RS-485
|
主从轮询,简单但实时性差
|
|
CANopen
|
CAN/CAN FD
|
事件驱动 + 同步机制,工业级实时性
|
✅ 关键认知:
CAN = 高速可靠的“高速公路”
CANopen = 标准化的“交通规则+车辆类型”
没有 CANopen,CAN 只是原始数据通道
🛣️ 二、CAN/CAN FD 基础:数据链路层核心
1. 经典 CAN vs CAN FD 关键差异
|
特性
|
经典 CAN
|
CAN FD
|
|---|---|---|
|
最大数据长度
|
8 字节
|
64 字节
|
|
数据段速率
|
≤1 Mbps
|
2~5 Mbps(仲裁段仍 1Mbps)
|
|
CRC 校验
|
15 位
|
17/21 位(更强纠错)
|
|
帧结构
|
固定
|
双速率 + BRS 位切换
|
2. CAN FD 双速率机制(图解)
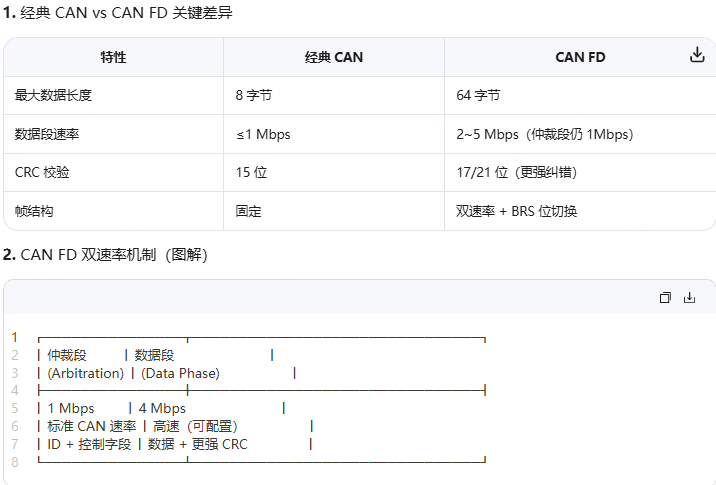
- BRS 位 = 速率切换开关(Bit Rate Switch)
- 类比:收费站前限速 60km/h(仲裁),收费站后放开 240km/h(数据)
3. DLC 码映射表(必须牢记!)
|
DLC 码
|
实际字节数
|
典型用途
|
|---|---|---|
|
0~8
|
0~8
|
经典 CAN 兼容
|
|
9
|
12
|
小数据块
|
|
10
|
16
|
标准块
|
|
11
|
20
|
—
|
|
12
|
24
|
—
|
|
13
|
32
|
常用
|
|
14
|
48
|
—
|
|
15
|
64
|
最大容量
|
⚠️ 关键技巧:
非标准长度数据 → 向上取整 DLC + 首字节携带真实长度
例:25 字节数据 → 选 DLC=13 (32字节) → 帧格式:[真实长度=25][25字节数据][7字节填充]
🏗️ 三、CANopen 核心架构:工业通信的骨架
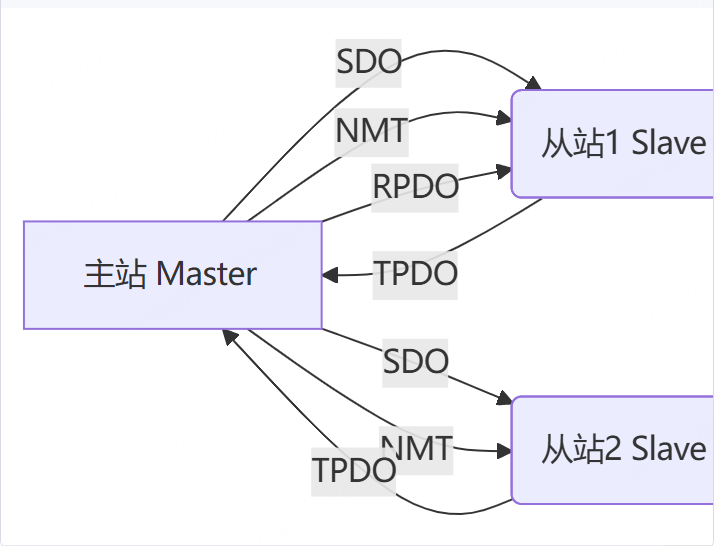
1. 通信模型全景图
2. NMT 网络管理(生命线!)
|
命令码
|
功能
|
节点状态
|
|---|---|---|
0x01 |
启动节点
|
→ Operational
|
0x02 |
停止节点
|
→ Pre-operational
|
0x80 |
进入初始化
|
→ Initialisation
|
0x81 |
重置节点
|
硬件复位
|
0x82 |
重置通信
|
清配置
|
✅ NMT 工作流程:
- 上电 → Initialisation
- 主机发
NMT_Reset_Comm(0x82)→ 清配置 - Pre-operational → SDO 配置 PDO
NMT_Start(0x01)→ Operational → PDO 激活
3. 心跳/节点守护(在线监控)
|
机制
|
从机行为
|
主机行为
|
推荐度
|
|---|---|---|---|
|
Heartbeat
|
周期发
0x700+NodeID |
超时判离线
|
✅ 首选
|
|
Node Guarding
|
收请求后回复
|
周期发请求
|
⚠️ 次选
|
💡 心跳配置:
- 从机 SDO 写
0x1017 = 1000(1000ms 心跳)- 主机超时阈值 = 150% 心跳周期(1500ms)
📚 四、对象字典:CANopen 的“灵魂”
1. 标准分区表(CiA 301)
|
Index 范围
|
名称
|
用途
|
类比 Modbus
|
|---|---|---|---|
|
0x1000-0x1029
|
Device Profile
|
设备信息
|
保持寄存器
|
|
0x1200-0x127F
|
SDO Server
|
SDO 服务参数
|
—
|
|
0x1400-0x15FF
|
RPDO Communication
|
RPDO 通信参数
|
—
|
|
0x1600-0x17FF
|
RPDO Mapping
|
RPDO 数据映射
|
—
|
|
0x1800-0x19FF
|
TPDO Communication
|
TPDO 通信参数
|
—
|
|
0x1A00-0x1BFF
|
TPDO Mapping
|
TPDO 数据映射
|
—
|
|
0x2000-0x5FFF
|
Manufacturer Specific
|
厂商自定义
|
4x 寄存器
|
|
0x6000-0x9FFF
|
Standard Device Profile
|
标准设备规范
|
—
|
|
0x6040
|
Controlword
|
控制字
|
4x(可写)
|
|
0x6041
|
Statusword
|
状态字
|
3x(只读)
|
|
0x6064
|
Position Actual
|
实际位置
|
3x
|
|
0x607A
|
Target Position
|
目标位置
|
4x
|
2. 子索引(Sub-index)机制
- 不是连续数组! 是稀疏映射表(如 0x1802 有 sub1, sub2, sub5)
- sub0 = 最高子索引号(必须存在)
- 保留子索引(如 sub4)直接跳过
🔑 内存真相:
对象字典 = ROM 中的索引表(指向 RAM 变量)
数据变量 = RAM 中的独立存储(通过指针关联)
⚡ 五、PDO/SDO 深度解析:实时与配置的双通道
1. 通信模型对比
|
特性
|
PDO
|
SDO
|
|---|---|---|
|
用途
|
实时数据传输
|
配置/诊断
|
|
方向
|
TPDO(从→主)<br>RPDO(主→从)
|
点对点(主↔从)
|
|
协议
|
无交互(推模式)
|
请求-响应(拉模式)
|
|
延迟
|
μs 级
|
ms 级
|
|
带宽
|
高效(无头部)
|
有开销
|
✅ 正确类比:
- RPDO = Modbus 4x 写(主机下发控制)
- TPDO = Modbus 3x 读(从机上报状态)
- SDO = 配置通道(替代轮询)
2. PDO 配置四步法(必须掌握!)
目标:配置 TPDO1 上报 Statusword + Position
- 禁用 TPDO:
SDO 写 0x1800+0 = 0x80000181 - 清空映射:
SDO 写 0x1A00+0 = 0x00 - 写入映射:
SDO 写 0x1A00+1 = 0x60410010(Statusword, 16bit)SDO 写 0x1A00+2 = 0x60640020(Position, 32bit)
- 启用 TPDO:
SDO 写 0x1800+0 = 0x00000181
💡 映射值格式:
0x[INDEX][SUB][SIZE]
SIZE:16bit=0x10, 32bit=0x20, 8bit=0x08
3. 多 PDO 通道策略(工业级实践)
|
通道
|
触发方式
|
典型数据
|
用途
|
|---|---|---|---|
|
TPDO1
|
SYNC (type=1)
|
Statusword + Position
|
高速同步控制
|
|
TPDO2
|
周期 10ms (type=255)
|
Velocity + Torque
|
中速监控
|
|
TPDO3
|
事件触发 (type=254)
|
Error register
|
故障即时上报
|
|
RPDO1
|
—
|
Controlword + TargetPos
|
主运动指令
|
|
RPDO2
|
—
|
MaxCurrent
|
参数动态调整
|
✅ 设计原则:
- TPDO1 保留给安全关键数据
- 避免在 TPDO 中映射可写对象
- 事件触发用于报警,避免周期浪费
⚙️ 六、实现与优化:从理论到产品
1. 内存优化技巧(RAM 为王!)
✅ 推荐方案:按功能模块划分小结构体

2. RTOS 集成最佳实践
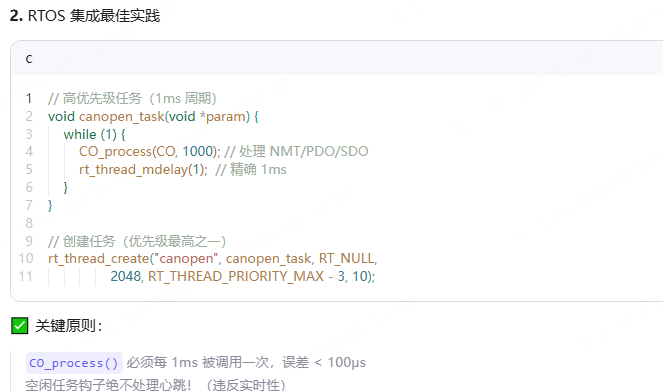
✅ 关键原则:
CO_process()必须每 1ms 被调用一次,误差 < 100μs
空闲任务钩子绝不处理心跳!(违反实时性)
3. 协议栈资源需求
|
协议栈
|
最小 ROM
|
最小 RAM
|
适用场景
|
|---|---|---|---|
|
CANopenNode
|
12 KB
|
800 B
|
✅ 首选(STM32/RTOS)
|
|
micro-canopen
|
8 KB
|
500 B
|
资源受限设备
|
|
CANopenSocket
|
20 KB
|
2 KB
|
Linux 主站
|
💡 裁剪技巧:
- 禁用
CO_EMERGENCY(省 200B RAM)- 减少 PDO 通道数(默认 4TPDO+4RPDO → 按需裁剪)
- 用
#ifdef控制模块编译
🛠️ 七、工具链与开发流程
- EDS 本质:扩展 INI 文件(
[Section]+Key=Value) - 主机无需预存 SDO 帧!动态组装(8 字节栈变量)
- 从机 SDO 响应:动态组装(无预存帧,节省 RAM)
2. 调试黄金组合
|
工具
|
用途
|
关键技巧
|
|---|---|---|
|
CANalyzer
|
总线分析
|
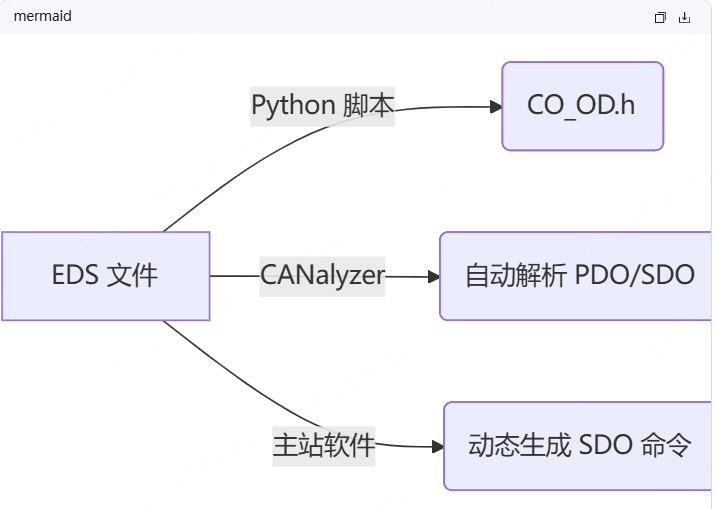
加载 EDS → 自动解析数据
|
|
SavvyCAN
|
免费替代
|
支持 CAN FD + 脚本扩展
|
|
STM32CubeMX
|
驱动配置
|
时序计算器(1Mbps/4Mbps)
|
|
CANopenEDS
|
EDS 编辑
|
生成 CO_OD.h 脚本
|
🔑 调试口诀:
- 先看 心跳(0x701) → 判断设备是否存活
- 监控 紧急报文(0x81) → 捕获错误
- 用 CANalyzer + EDS → 自动解析 PDO 内容
⚠️ 八、常见陷阱与避坑指南
1. 致命错误清单
|
问题
|
现象
|
解决方案
|
|---|---|---|
|
PDO 未禁用直接修改
|
总线错误/数据错乱
|
先写
0x8000xxxx 禁用 |
|
NMT 未启动进 Operational
|
PDO 不工作
|
先发
0x01 0x01 |
|
心跳超时阈值过小
|
频繁判离线
|
设为 150% 心跳周期
|
|
DLC 未向上取整
|
数据截断
|
25字节 → 选 32字节 DLC
|
|
SDO 超时无重试
|
配置失败
|
实现 3 次重试机制
|
2. 实时性陷阱
- 问题:TPDO 被高优先级任务抢占,心跳延迟
- 真相:心跳独立于 TPDO,但依赖
CO_process()调用 - 方案:
- 协议栈任务优先级 > 应用任务
- 用硬件定时器保证 1ms 周期
- CAN 中断中仅置标志,任务中处理
3. Modbus 习惯带入 CANopen
|
Modbus 习惯
|
CANopen 正确做法
|
|---|---|
|
轮询读 3x 寄存器
|
用 TPDO 自动上报
|
|
4x 寄存器存传感器数据
|
3x 只读,4x 可写(严格分离)
|
|
固定寄存器地址
|
SDO 配置 PDO 映射(动态)
|
✅ 工业规范:
PDO 用于实时数据,SDO 用于配置
绝不轮询 TPDO 已上报的数据!
📈 九、学习路径建议:从入门到工业级
阶段 1:基础夯实(1-2周)
- 用 STM32 CubeMX 配置 CAN(1Mbps)
- 用 CANalyzer 抓包分析标准帧
- 实现自定义协议传输 >8 字节数据
阶段 2:CAN FD 进阶(1周)
- 配置 CAN FD 双速率(1Mbps/4Mbps)
- 实现 64 字节数据传输 + CRC16
- 用 DLC 码处理非标准长度
阶段 3:CANopen 入门(2-3周)
- 移植 CANopenNode 到 STM32
- 用 SDO 读写 0x6041/0x6064
- 配置 TPDO1 上报位置
阶段 4:工业实践(持续)
- 实现 SYNC 同步多轴
- 集成到 RTOS(FreeRTOS/RT-Thread)
- 用 EDS 文件生成配置
💡 终极检验:
不依赖 CANalyzer,仅靠逻辑分析仪 + 协议文档
调试通一个 3 节点 CANopen 网络
🌟 十、关键总结:3 句话掌握精髓
- PDO 是“推”,SDO 是“拉”
→ 实时数据用 TPDO 自动上报,配置用 SDO 按需读写 - 对象字典 = ROM 索引表 + RAM 变量
→ 功能模块化结构体 优于单一巨型结构体 - NMT 控制状态,心跳监控生命
→ 先配置(Pre-op),再运行(Operational),超时 = 离线
📚 附录:推荐资源
- 协议栈:CANopenNode GitHub
- 书籍:《The Complete CANopen Book》by Holger Zeltwanger
- 工具:CANopenEDS Editor(免费)、SavvyCAN(开源)
- 标准:CiA 301(基础)、CiA 402(伺服)
💡 最后建议:
用 STM32 + CANopenNode + 周立功 USBCAN
搭建最小系统,亲手配置一个 TPDO
—— 理论百遍,不如动手一次!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号