
【牛顿-莱布尼茨公式的n维推广】外微分公式、斯托克斯公式、广义斯托克斯公式
0、前言&引子
0.1、本文要求的预备知识
本文要求读者已修习书目《高等数学(下)》,了解「梯度」、「散度」、「旋度」的定义,了解全微分公式,熟悉「第一/二类曲线/面积分」,了解「牛顿-莱布尼茨公式」、「格林公式」、「高斯公式」、「斯托克斯公式」。
本文旨在于让读者理解到「牛顿-莱布尼茨公式」、「格林公式」、「高斯公式」、「斯托克斯公式」可以被统一为「广义斯托克斯公式」。
0.2、牛顿-莱布尼茨公式
我们在高数中讲过牛顿-莱布尼茨公式
或者记为
0.3、格林公式
在讲二重积分时,引入了格林公式
其中曲线 \(l\) 是平面区域 \(D\) 的边界曲线,我们用符号 \(l=\partial D\) 来表示 \(D\) 的边界曲线,并用行列式化简表达式
表达式右端可以看作向量的内积 \(\left\{P,Q\right\}\cdot \left\{\mathrm{d}x,\mathrm{d}y\right\}\) ,因此,令 \(\boldsymbol{F}=\left\{ P,Q \right\} ,\mathrm{d}\boldsymbol{l}=\left\{ \mathrm{d}x,\mathrm{d}y \right\}\) ,格林公式可以进一步写为
还记得高数讲得旋度公式 \(\nabla \times \boldsymbol{F}=\left| \begin{matrix} \boldsymbol{\hat{x}}& \boldsymbol{\hat{y}}& \boldsymbol{\hat{z}}\\ \frac{\partial}{\partial x}& \frac{\partial}{\partial y}& \frac{\partial}{\partial z}\\ P& Q& R\\\end{matrix} \right|\) 吗?是不是感觉和这里很像?因为这里的 \(\boldsymbol{F}\) 没有 \(z\) 分量,所以这里有 \(\nabla \times \boldsymbol{F}=\left| \begin{matrix} \boldsymbol{\hat{x}}& \boldsymbol{\hat{y}}& \boldsymbol{\hat{z}}\\ \frac{\partial}{\partial x}& \frac{\partial}{\partial y}& 0\\ P& Q& 0\\\end{matrix} \right| = \boldsymbol{\hat{z}}\left| \begin{matrix} \frac{\partial}{\partial x}& \frac{\partial}{\partial y}\\ P& Q\\ \end{matrix} \right|\) 。如果我们再令 \(\mathrm{d}\boldsymbol{S} = \boldsymbol{\hat{z}}\mathrm{d}x\mathrm{d}y = \left\{0,0,\mathrm{d}x\mathrm{d}y\right\}\) ,左端就等价于 \(\left(\nabla \times \boldsymbol{F}\right)\cdot \mathrm{d}\boldsymbol{S}\) 了。因此,我们最终将格林公式改写为了
0.4、高斯公式
在讲三重积分时,我们引入了高斯公式
其中曲线 \(\partial \Omega\) 是实心空间立体区域 \(\Omega\) 的边界曲面(例如球体的边界曲面就是球面)。
并且,与格林公式类似地,我们令 \(\boldsymbol{F}=\left\{ P,Q,R \right\} ,\mathrm{d}\boldsymbol{S}=\mathrm{d}S\left\{ \cos\alpha, \cos\beta, \cos\gamma \right\}\) ,并引入散度算子 \(\nabla=\left\{ \frac{\partial }{\partial x},\frac{\partial }{\partial y},\frac{\partial }{\partial z} \right\}\) ,此时 \(\nabla \cdot \boldsymbol{F}= \frac{\partial P}{\partial x}+\frac{\partial Q}{\partial y}+\frac{\partial R}{\partial z}\) 。我们可以把高斯公式改写为
0.5、斯托克斯公式
通过格林公式和高斯公式的练习,是不是有些找到感觉了?让我们来看看最后一个公式——斯托克斯公式。事实上,我们可以认为斯托克斯公式是格林公式向三维的自然推广。
高数讲的斯托克斯公式是
令 \(\boldsymbol{F}=\left\{ P,Q,R \right\} ,\mathrm{d}\boldsymbol{l}=\left\{ \mathrm{d}x,\mathrm{d}y,\mathrm{d}z \right\}\) ,借助高数讲得旋度公式 \(\nabla \times \boldsymbol{F}=\left| \begin{matrix} \boldsymbol{\hat{x}}& \boldsymbol{\hat{y}}& \boldsymbol{\hat{z}}\\ \frac{\partial}{\partial x}& \frac{\partial}{\partial y}& \frac{\partial}{\partial z}\\ P& Q& R\\\end{matrix} \right|\) ,再令 \(\mathrm{d}\boldsymbol{S} = \boldsymbol{\hat{x}}\mathrm{d}y\mathrm{d}z +\boldsymbol{\hat{y}}\mathrm{d}z\mathrm{d}x+\boldsymbol{\hat{z}}\mathrm{d}x\mathrm{d}y= \left\{\mathrm{d}y\mathrm{d}z,\mathrm{d}z\mathrm{d}x,\mathrm{d}x\mathrm{d}y\right\}\) ,斯托克斯公式就能化为和格林公式一样的形式了。
0.6、广义斯托克斯公式(牛顿莱布尼茨公式的推广)
在这里,我不加证明也不加说明地给出「广义斯托克斯公式」,这一公式将上面的所有公式统一了起来。至于这一公式的含义,则需要阅读完本文全文后才能理解,本文将会讲解本公式中涉及的所有符号。
相信第一次看到这个公式的同学们是懵逼的,因为一堆符号看起来认识,但和我们认知中的并不一样。比如:里面的 \(\partial \Omega\) 是什么意思?为什么右面的积分符号 \(\int\) 没有配套 \(\mathrm{d}x\) ?左面的 \(\mathrm{d}\omega\) 是什么含义?让我们带着这些疑问来看本文的内容吧。
1、记号说明
注:如果嫌太长不想看的话,每一段前面都几句话总结环节。
浓缩的都是精华,短的公式不一定好理解,因为每一个符号背后的含义可能都十分复杂。不要看 \(\int_{\Omega}{\mathrm{d}\omega}=\int_{\partial \Omega}{\omega}\) 这个公式很短,但在这一个短短的公式中,却蕴含了十分多的数学知识。接下来,让我们以这个公式为主线,来探索这些符号的含义,以及学习这些数学知识。
1.1、求边界记号∂Ω的含义
几句话总结:假设 \(\Omega\) 代表一个区域,那么 \(\partial \Omega\) 代表区域的边界。比如平面上的实心圆、三维空间的半球面,边界就是一个圆。球体的边界就是一个球面。
首先引入一个求边界记号 \(\partial\) ,假设 \(\Omega\) 代表一个区域,那么 \(\partial \Omega\) 代表区域的边界。
下面举几个直观的例子——
- 如果 \(l\) 代表一条直线(如一个区间), \(\partial l\) 就代表它的两端点(如该区间端点)。
- 如果 \(D\) 代表一个平面(如一个实心圆), \(\partial D\) 就代表它的边界曲线(如该圆边界)。
- 如果 \(V\) 代表空间中的一个体(如一个实心球体), \(\partial V\) 就代表它的边界曲面(如该球表面)。
再举一个具体的例子,假设 \(V=\left\{ \left( x,y,z \right) |x^2+y^2+z^2\leqslant 1 \right\}\) 是 \(3\) 维的单位球,那么 \(\partial V\) 就是它的边界,即 \(2\) 自由度的球面 \(\partial V=\left\{ \left( x,y,z \right) |x^2+y^2+z^2=1 \right\}\) (所谓自由度,就是自由移动的程度。比如球面只能向着 \(2\) 个方向自由移动,无法向着半径方向自由移动,所以球面的自由度为 \(2\) )。
1.2、流形
几句话总结:无论处于几维空间,曲线被称为 \(1\) 维流形,曲面被称为 \(2\) 维流形,三维体被称为 \(3\) 维流形,这于所处空间的维度无关。例如 \(3\) 维空间中的圆是曲线,所以是 \(1\) 维流形。 \(3\) 维空间中的球面是曲面,所以是 \(2\) 维流形。
我们知道 \(V=\left\{ \left( x,y,z \right) |x^2+y^2+z^2\leqslant 1 \right\}\) 是 \(3\) 维的单位球,所以它的维度是 \(3\) 。那么问题来了,它的边界球面 \(\partial V=\left\{ \left( x,y,z \right) |x^2+y^2+z^2=1 \right\}\) 的“维度”是多少呢?
我们通过直觉会感觉到,球面比起球少了一个自由度。也就是说,球面无法在半径方向自由移动,所以球面的“维度”理应是 \(2\) ,即使它确实处在 \(3\) 维空间中,但想象一个住在球面上的居民,它只能往两个方向自由移动,所以它理应是 \(2\) 维的,只是被嵌入了 \(3\) 维空间。
同理,一条三维空间中的曲线,它真正的自由度只有 \(1\) ,因为想象一个住在曲线上的居民,它只能往一个方向自由移动,所以它理应是 \(1\) 维的,只是被嵌入了 \(3\) 维空间。
为了准确地描述这一现象,并且将曲线、曲面、体统一起来,我们将它们命名为“流形”。其中
- 只要是曲线,无论处于几维空间,都将其称为 \(1\) 维流形。
- 只要是曲面,无论处于几维空间,都将其称为 \(2\) 维流形。
- 只要是三维体,无论处于几维空间,都将其称为 \(3\) 维流形。
- 只要是 \(n\) 维体,无论处于几维空间,都将其称为 \(n\) 维流形。
例如超平面 \(S_{n-1}=\left\{ \left( x_1,x_2,\cdots ,x_n \right) |x_1+x_2+\cdots +x_n = 1 \right\}\) 就是一个 \(n-1\) 维的流形。
1.3、楔形积(dx∧dy)=-(dy∧dx)
几句话总结:对于第二类曲面积分而言,曲面微元是具有方向的,而方向则是由右手法则确定的。 \(\mathrm{d}x \wedge \mathrm{d}y\) 是从 \(x\) 指向 \(y\) , \(\mathrm{d}y \wedge \mathrm{d}x\) 是从 \(y\) 指向 \(x\) ,自然相差一个负号。于是楔形积满足反交换律 \(\mathrm{d}x \wedge \mathrm{d}y = -\mathrm{d}y \wedge \mathrm{d}x\) 。
我们约定 \(\boldsymbol{\hat{x}}\) 代表与 \(\boldsymbol{x}\) 向量同向的单位方向向量。
在高数中,我们知道曲面是有正面和反面的说法的。比如第二类曲面积分, \(\boldsymbol{F}\) 和 \(\mathrm{d}\boldsymbol{S}\) 方向一致的话,那么积分为正,方向相反则积分为负。那么这个 \(\mathrm{d}\boldsymbol{S}\) 的方向究竟是什么呢?
我们可以通过下图清楚地看出——法向量 \(\boldsymbol{\hat{n}}\) 的方向由 \(\mathrm{d}x\) 和 \(\mathrm{d}y\) 的右手法则确定, \(\mathrm{d}\boldsymbol{S}\) 相当于 \(\mathrm{d}x\) 和 \(\mathrm{d}y\) 之间的叉乘/外积。伸出右手,四指从 \(\mathrm{d}x\) 向 \(\mathrm{d}y\) 绕,此时大拇指的指向就是法向量 \(\boldsymbol{\hat{n}}\) 的方向。我们将其记为 \(\boldsymbol{\hat{n}} \left( \mathrm{d}x \wedge \mathrm{d}y \right)\) ,它代表方向与 \(\boldsymbol{\hat{n}}\) 同向,大小为 \(\mathrm{d}x \cdot \mathrm{d}y\cdot \sin \theta\) 的面积微元。
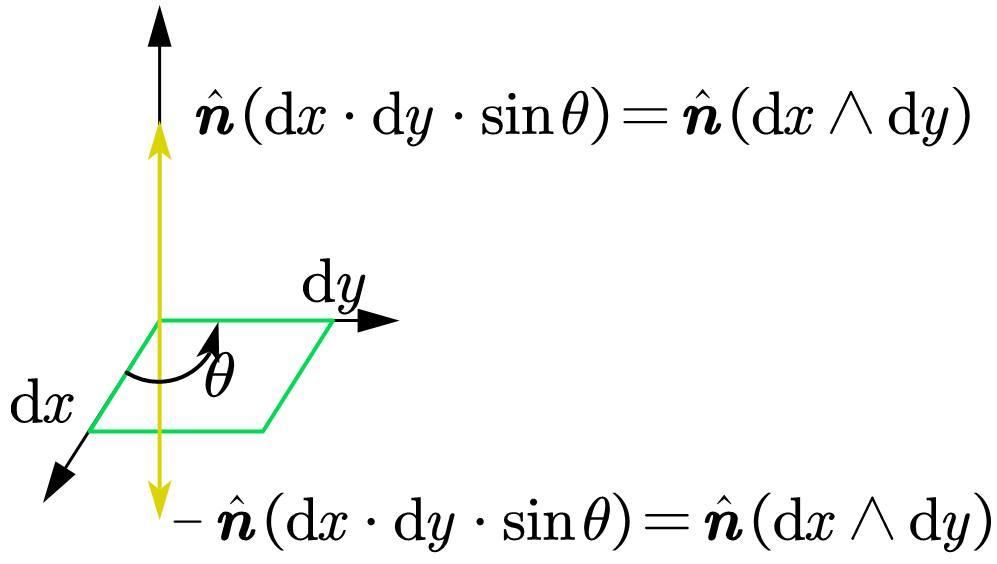
那么,由图不难看出, \(\mathrm{d}y \wedge \mathrm{d}x\) 的方向与法向量 \(\boldsymbol{\hat{n}}\) 的反方向,所以应当有下表达式成立:
在三维空间中——
- \(\mathrm{d}\boldsymbol{l}=\left\{ \mathrm{d}x,\mathrm{d}y,\mathrm{d}z \right\}\) 代表与曲线方向向量同向的矢量线微元。
- \(\mathrm{d}\boldsymbol{S}=\left\{ \mathrm{d}y \wedge \mathrm{d}z,\mathrm{d}z \wedge \mathrm{d}x,\mathrm{d}x \wedge \mathrm{d}y \right\}\) 代表与曲面法向量同向的矢量面微元。
- 因为空间只有 \(3\) 维,因此 \(\mathrm{d}V=\mathrm{d}x \wedge \mathrm{d}y \wedge \mathrm{d}z\) 代表标量体积微元。
当然,这一公式可以推广到高维,我们称之为“反交换律”,即交换两个元素后,等式添加一个负号。
1.4、外微分记号dω的含义
几句话总结:如果 \(\omega\) 是一个三元函数 \(\omega=f\left(x,y,z\right)\) ,那么 \(\omega\) 被称为「第零次外微分形式」,其微分满足:
\[\mathrm{d}\omega =\left( \nabla f \right) \cdot \left( \mathrm{d}\boldsymbol{l} \right) \tag{1.2} \]如果设 \(\boldsymbol{F}=\left\{ P,Q,R \right\}\) , \(\omega\) 是一个一维的微元 \(\omega = \boldsymbol{F}\cdot \mathrm{d}\boldsymbol{l}=P\mathrm{d}x+Q\mathrm{d}y+R\mathrm{d}z\) ,那么 \(\omega\) 被称为「第一次外微分形式」,其微分满足:
\[\mathrm{d}\omega =\left( \nabla \times \boldsymbol{F} \right) \cdot \left( \mathrm{d} \boldsymbol{S} \right) \tag{1.3} \]如果设 \(\boldsymbol{F}=\left\{ P,Q,R \right\}\) , \(\omega\) 是一个二维的微元 $$\omega = \boldsymbol{F}\cdot \mathrm{d}\boldsymbol{S} = P \mathrm{d}y\land \mathrm{d}z+Q \mathrm{d}z\land \mathrm{d}x+R \mathrm{d}x\land \mathrm{d}y$$ ,那么 \(\omega\) 被称为「第二次外微分形式」,其微分满足:
\[\mathrm{d}\omega =\left( \nabla \cdot \boldsymbol{F} \right) \cdot \left( \mathrm{d} V \right) \tag{1.4} \]我们可以这么总结: \(\omega\) 是几次外微分形式,关键看 \(\omega = \boldsymbol{F}\cdot \mathrm{d}?\) , \(?\) 是几维,外微分就是几次形式。零次形式 \(\omega\) 的外微分是梯度乘以弧长微元 \(\mathrm{d}\omega =\left( \nabla f \right) \cdot \left( \mathrm{d}\boldsymbol{l} \right)\) ,一次形式 \(\omega\) 的外微分是旋度乘以面积微元 \(\left( \nabla \times \boldsymbol{F} \right) \cdot \left( \mathrm{d} \boldsymbol{S} \right)\) ,二次形式 \(\omega\) 的外微分是散度乘以体积微元 \(\left( \nabla \cdot \boldsymbol{F} \right) \cdot \left( \mathrm{d} V \right)\) 。
\(\mathrm{d}\omega\) 这个玩意被我们称为外微分。
我们假设 \(\omega\) 是一个三元函数 \(\omega=f\left(x,y,z\right)\) ,因为这里还没开始进行外微分运算,我们称 \(\omega\) 为「第零次外微分形式」。那么根据全微分法则,「『第零次外微分形式』的微分」为
我们求出了 \(\mathrm{d}\omega\) 。
进一步地,我们知道 \(f\) 的梯度为 \(\nabla f=\left\{ \frac{\partial f}{\partial x},\frac{\partial f}{\partial y},\frac{\partial f}{\partial z} \right\}\) ,并记弧长方向向量微元 \(\mathrm{d}\boldsymbol{l}=\left\{ \mathrm{d}x,\mathrm{d}y,\mathrm{d}z \right\}\) ,得到「『第零次外微分形式』的微分」:
那么,我们自然会想:设 \(\boldsymbol{F}=\left\{ P,Q,R \right\}\) , \(\omega = \boldsymbol{F}\cdot \mathrm{d}\boldsymbol{l}=P\mathrm{d}x+Q\mathrm{d}y+R\mathrm{d}z\) 能不能继续微分下去,也就是求出 \(\mathrm{d}\omega\) 。因为这里的形式与「『第零次外微分形式』的微分」很像,我们称 \(\omega\) 为「第一次外微分形式」。
我们对其进行一次微分,得到
这个公式我就不予证明了。结合全微分公式
以及 \(\mathrm{d}x \wedge \mathrm{d}x=\mathrm{d}y \wedge \mathrm{d}y=\mathrm{d}z \wedge \mathrm{d}z=0\) ,和反交换律 \(\mathrm{d}x \wedge \mathrm{d}y=-\mathrm{d}y \wedge \mathrm{d}x\) ,得到「『第一次外微分形式』的微分」:
设 \(\boldsymbol{F}=\left\{ P,Q,R \right\}\) ,注意到旋度公式
再令 \(\mathrm{d} \boldsymbol{S} = \left\{ \mathrm{d}y\land \mathrm{d}z,\mathrm{d}z\land \mathrm{d}x,\mathrm{d}x\land \mathrm{d}y \right\}\) ,就求出了「『第一次外微分形式』的微分」:
进一步地,我们还能求「第二次外微分形式」。令 \(\omega = \boldsymbol{F}\cdot \mathrm{d}\boldsymbol{S} = P \mathrm{d}y\land \mathrm{d}z+Q \mathrm{d}z\land \mathrm{d}x+R \mathrm{d}x\land \mathrm{d}y\) ,称之为「第二次外微分形式」,得
与上面的推导类似地,结合全微分公式
以及 \(\mathrm{d}x \wedge \mathrm{d}x=\mathrm{d}y \wedge \mathrm{d}y=\mathrm{d}z \wedge \mathrm{d}z=0\) ,和反交换律 \(\mathrm{d}x \wedge \mathrm{d}y=-\mathrm{d}y \wedge \mathrm{d}x\) ,得到「『第二次外微分形式』的微分」:
设 \(\boldsymbol{F}=\left\{ P,Q,R \right\}\) ,注意到散度公式 \(\nabla \cdot \boldsymbol{F} = \left( \frac{\partial P}{\partial x}+\frac{\partial Q}{\partial y}+\frac{\partial R}{\partial z} \right)\) ,再令 \(\mathrm{d} V = \mathrm{d}x\land \mathrm{d}y \land \mathrm{d}z\) ,就求出了「『第二次外微分形式』的微分」:
2、用「广义斯托克斯公式」推导「牛顿-莱布尼茨公式」、「格林公式」、「高斯公式」、「斯托克斯公式」
广义斯托克斯公式是——
2.1、牛顿-莱布尼茨公式
一维的牛顿-莱布尼茨公式是——
或者考虑二、三维情形,写成
令区域 \(\Omega=\left[ a,b \right]\) ,则边界点 \(\partial \Omega=a,b\) ,函数 \(\omega = f\) 为零次外微分形式。
则 \(\int_{\partial \Omega}{\omega} = f\left( b \right) -f\left( a \right)\) ,自然有一维的牛顿-莱布尼茨公式——
或者令考虑二、三维情形,令区域 \(\Omega=L\) ,则边界点 \(\partial \Omega=\boldsymbol{x}_1,\boldsymbol{x}_2\) ,函数 \(\omega = f\) 为零次外微分形式。
则 \(\int_{\partial \Omega}{\omega} = f\left( \boldsymbol{x}_2 \right) -f\left( \boldsymbol{x}_1 \right)\) , \(\mathrm{d}\omega=\left(\nabla f\right) \cdot \mathrm{d}\boldsymbol{l}\) ,自然有二、三维的牛顿-莱布尼茨公式——
2.2、格林公式&斯托克斯公式
格林公式和斯托克斯公式都是——
唯一的区别就是:格林公式是二维情形,斯托克斯公式是三维情形。这一点类似于一维的牛顿-莱布尼茨公式与二、三维的牛顿-莱布尼茨公式。
令区域 \(\Omega=D\) ,则 \(\partial \Omega\) 是边界曲线,函数 \(\omega = \boldsymbol{F} \cdot\mathrm{d}\boldsymbol{l}\) 为一次外微分形式。
则 \(\int_{\partial \Omega}{\omega} = \oint_{\partial D}{\boldsymbol{F} \cdot\mathrm{d}\boldsymbol{l}}\) , \(\mathrm{d}\omega=\left(\nabla \times \boldsymbol{F}\right)\cdot \mathrm{d}\boldsymbol{S}\) ,自然有格林公式和斯托克斯公式——
2.3、高斯公式
高斯公式是——
令区域为 \(\Omega\) ,则 \(\partial \Omega\) 是边界曲线,函数 \(\omega = \boldsymbol{F}\cdot \mathrm{d}\boldsymbol{S}\) 为二次外微分形式。
则 \(\int_{\partial \Omega}{\omega} = \oiint_{\partial \Omega}{\boldsymbol{F} \cdot \mathrm{d}\boldsymbol{S}}\) , \(\mathrm{d}\omega=\mathrm{d}\omega =\left( \nabla \cdot \boldsymbol{F} \right) \cdot \left( \mathrm{d} V \right)\) ,自然有高斯公式——
3、总结
我们利用了广义斯托克斯公式——
通过将不同次数外微分形式的 \(\omega\) 代入,并选择与之维度匹配的区域 \(\Omega\) ,就得到了对应的公式。其中——
将 \(0\) 次外微分形式 \(\omega = f\) ,区域 \(\Omega=L\) 代入,得到一、二、三维的「牛顿-莱布尼茨公式」
将 \(1\) 次外微分形式 \(\omega = \boldsymbol{F} \cdot\mathrm{d}\boldsymbol{l}\) ,区域 \(\Omega=D\) 代入,得到二维的「格林公式」和三维的「斯托克斯公式」
将 \(2\) 次外微分形式 \(\omega = \boldsymbol{F}\cdot \mathrm{d}\boldsymbol{S}\) ,区域 \(\Omega\) 代入,得到「牛顿-莱布尼茨公式」
其中利用了结论——
如果 \(\omega\) 是一个三元函数 \(\omega=f\left(x,y,z\right)\) ,那么 \(\omega\) 被称为「第零次外微分形式」,其微分满足:
\[\mathrm{d}\omega =\left( \nabla f \right) \cdot \left( \mathrm{d}\boldsymbol{l} \right) \tag{1.2} \]如果设 \(\boldsymbol{F}=\left\{ P,Q,R \right\}\) , \(\omega\) 是一个一维的微元 \(\omega = \boldsymbol{F}\cdot \mathrm{d}\boldsymbol{l}=P\mathrm{d}x+Q\mathrm{d}y+R\mathrm{d}z\) ,那么 \(\omega\) 被称为「第一次外微分形式」,其微分满足:
\[\mathrm{d}\omega =\left( \nabla \times \boldsymbol{F} \right) \cdot \left( \mathrm{d} \boldsymbol{S} \right) \tag{1.3} \]如果设 \(\boldsymbol{F}=\left\{ P,Q,R \right\}\) , \(\omega\) 是一个二维的微元 $$\omega = \boldsymbol{F}\cdot \mathrm{d}\boldsymbol{S} = P \mathrm{d}y\land \mathrm{d}z+Q \mathrm{d}z\land \mathrm{d}x+R \mathrm{d}x\land \mathrm{d}y$$ ,那么 \(\omega\) 被称为「第二次外微分形式」,其微分满足:
\[\mathrm{d}\omega =\left( \nabla \cdot \boldsymbol{F} \right) \cdot \left( \mathrm{d} V \right) \tag{1.4} \]
不难发现,这种方法可以推广到 \(n\) 维。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号