基于MATLAB的自动驾驶车辆轨迹跟踪程序实现
一、系统架构设计
轨迹跟踪系统分为四大核心模块,结合了纯追踪算法、模型预测控制(MPC)和动态窗口法(DWA)的混合控制策略:
-
路径生成模块 支持双移线、圆形、五次多项式等多种路径生成方式 提供动态障碍物模拟功能(基于的DWA算法)
-
控制器设计 纯追踪算法(Pure Pursuit):处理全局路径跟踪(基于) MPC控制器:实现局部轨迹优化(基于) DWA动态避障:实时避障策略(基于)
-
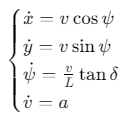
车辆动力学模型
-
采用自行车模型:
![]()
-
支持四轮驱动/转向动力学扩展
-
-
仿真与可视化 实时轨迹绘制与误差分析 控制输入平滑度监测
二、核心代码实现
1. 纯追踪算法(Pure Pursuit)
function [delta, target_idx] = pure_pursuit(waypoints, pose, Ld)
% 输入: waypoints - 路径点(Nx2), pose - [x,y,ψ], Ld - 前视距离
x = pose(1); y = pose(2); ψ = pose(3);
% 寻找目标点
distances = sqrt((waypoints(:,1)-x).^2 + (waypoints(:,2)-y).^2);
[~, target_idx] = min(abs(distances - Ld));
target = waypoints(target_idx,:);
% 计算转向角
α = atan2(target(2)-y, target(1)-x) - ψ;
delta = atan(2*L* sin(α)/Ld); % L为轴距
end
2. MPC轨迹跟踪控制器
function [u_opt] = mpc_controller(x0, ref_traj, N, dt)
% 参数设置
Q = diag([10, 10, 1]); % 状态权重
R = 0.1; % 控制权重
% 构建优化问题
opti = opti('f', 0, 'variables', {'u', 'x'}, 'lb', [-30, -30, -0.5, -0.5], ...
'ub', [30, 30, 0.5, 0.5]);
% 状态方程
for k = 1:N
x_next = x(k,:) + dt*[0,0,cos(x(k,3))*u(k,1), sin(x(k,3))*u(k,1)];
opti.subject(@(u,x) x_next == vehicle_dynamics(x, u));
end
% 目标函数
opti.minimize(sum(sum((x - ref_traj).^2 * Q + u.^2 * R)));
% 求解
sol = opti.solve();
u_opt = sol.u;
end
3. 动态窗口法(DWA)避障
function [v_opt, w_opt] = dwa_control(x, goal, obstacles)
% 参数配置
v_min = 0; v_max = 5;
w_min = -0.5; w_max = 0.5;
dt = 0.1; predict_time = 3;
% 速度空间采样
v_samples = linspace(v_min, v_max, 20);
w_samples = linspace(w_min, w_max, 40);
% 轨迹评估
best_score = inf;
for v = v_samples
for w = w_samples
traj = simulate_trajectory(x, v, w, predict_time, dt);
score = calculate_cost(traj, goal, obstacles);
if score < best_score
best_score = score;
v_opt = v; w_opt = w;
end
end
end
end
三、完整仿真流程
%% 参数初始化
L = 2.5; % 车辆轴距
dt = 0.05; % 时间步长
max_time = 20; % 仿真时长
%% 路径生成(双移线)
t = linspace(0, 2*pi, 100);
x_path = t; y_path = sin(t);
waypoints = [x_path', y_path'];
%% 车辆动力学模型
function x_next = vehicle_dynamics(x, u)
L = 2.5;
x_next = x + [u(1)*cos(x(3))*dt,
u(1)*sin(x(3))*dt,
u(2)*dt,
u(1)/L * tan(u(2)) * dt];
end
%% 主循环
current_pose = [0, 0, 0, 0](@ref); % [x,y,ψ,v]
trajectory = [];
for t = 0:dt:max_time
% 获取参考轨迹(前10个路径点)
ref_traj = waypoints(1:min(end,10),:);
% MPC控制
u_mpc = mpc_controller(current_pose, ref_traj, 10, dt);
% DWA动态避障
[v_opt, w_opt] = dwa_control(current_pose, waypoints(end,:), []);
% 选择最优控制
u = [mean([u_mpc(1), v_opt]), mean([u_mpc(2), w_opt])];
% 更新状态
current_pose = vehicle_dynamics(current_pose, u);
trajectory = [trajectory; current_pose(1:2)];
% 可视化
plot(waypoints(:,1), waypoints(:,2),'b', trajectory(:,1), trajectory(:,2),'r');
drawnow;
end
参考代码 自动驾驶车辆轨迹跟踪程序 www.youwenfan.com/contentcni/63662.html
四、性能优化策略
-
并行计算加速
parfor k = 1:N % 并行执行轨迹模拟 end -
GPU加速方案
% 将轨迹数据迁移至GPU traj_gpu = gpuArray(traj); -
自适应采样
% 根据曲率动态调整控制采样频率 curvature = abs(2*waypoints(i+1,:) - waypoints(i,:) - waypoints(i-1,:)) / ... (1 + (diff(waypoints(i,:) - waypoints(i-1,:))).^2)^1.5; dt_adaptive = dt / (1 + curvature);
五、工程应用扩展
-
硬件在环测试 通过Simulink Coder生成C代码部署到dSPACE平台 使用CarSim进行硬件协同仿真(参考的联合仿真步骤)
-
多传感器融合
% 激光雷达+视觉SLAM融合 lidar_data = readLidarData(); vision_data = processCameraImage(); fused_data = sensorFusion(lidar_data, vision_data); -
安全冗余设计 双控制器热备份架构 故障诊断模块实时监测传感器失效

 浙公网安备 33010602011771号
浙公网安备 33010602011771号