TMF8821 dToF传感器应用笔记
之前参加了硬禾和 AMS OSRAM 联合举办的活动。这里记录一下这款传感器的特性和实际应用的思路。
dToF 传感器原理
dToF 传感器是一种距离传感器,可用于实现距离检测、手势检测,障碍识别等功能,在智能手机、AR/VR、汽车苹果iPad Pro 的LiDAR 技术也有 dToF 的身影。
关于TMF 882 x 系列传感器的原理,它的手册[1]上是这么描述的:
TMF 8820/21/28 的基本原理是通过垂直腔面发射激光器(VCSEL) 发射一系列脉冲,脉冲的设置由迭代配置决定。这些脉冲通过微透镜阵列(MLA)射向照明场(Fol,field of illumination)范围。物体会将这些脉冲光反射到 TMF 8820/21/28 的接收镜片,进入单光子雪崩二极管(SPAD ,single photon avalance detector) 阵列。时间数字转换器 (TDC,time to digital converter)会测量这些脉冲光从发射到接收的时间,并将这些次数统计到一个直方图的每个时间区间内。TMF 8820/21 一次发送 550k 个脉冲,TDC 的完整直方图如图 23 所示。
The TMF8820/21/28 operating principle uses a pulse train of VCSEL pulses defined by the iteration setting. These pulses are spread using a MLA (micro lens array) to illuminate the FoI (field of illumination). An object reflects these rays back to the TMF8820/21/28 receiver optics lens and onto a SPAD (single photon avalanche detector) array. A TDC (time to digital converter) measures now the time from emission of these pulses to their arrival and accumulates the hits into bins inside a histogram. As TMF8820/21 sends 550 k pulses (default settings), the output of the TDC is a full histogram as shown in Figure 23.
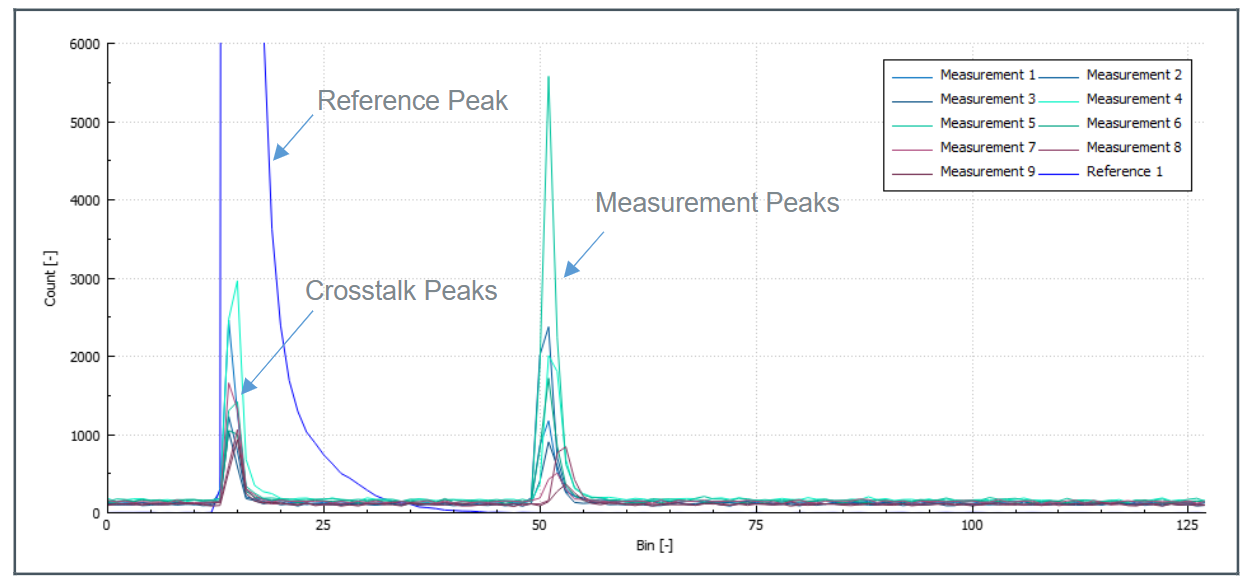
可以看到图中有两个尖峰。
左边的尖峰是由 VCSEL 腔体内部的 SPAD 生成的。也就是说,就算传感器上方什么都没有,也会产生这个尖峰。这个尖峰和bin 15 附件的串扰被用来计算零距离。
右边的尖峰出现在bin 50 的位置。在传感器内部有一个ARM M0 的处理器,负责将这些表示时间的bin 值转换成距离值。在图中的例子里面,bin 50 对应的实际距离为 2m。因此,可以根据这个直方图判断出,距离 2M 的地方有一个障碍物。
根据手册上的描述,在 10m 范围内,TMF 882 x 的测量精度在 3%以内。我找到了一个 TI 的 TDC 7200, 它的分辨率是 55ps。如果要达到 1 cm 的分辨率,TDC 的精度就要在 \(\frac{1*10^{-2}m}{3*10^8 m/s} = 33*10^{-12}s = 33ps{}\)。
数据预处理
我手上拿到的是 TMF 8821 传感器,它可以根据配置在Fol 内测量 3×3,3×4,4×4 个区域。如果配置成 3×3,就会生成总共 9 个直方图。观察下面的直方图可以看到在除了在距离 2 m 的地方有一个物体,右上角的区域还在距离 50cm 的地方检测到了一个物体。

为了方便使用,传感器内部的处理器会对直方图进行进一步处理,最后通过传感器的i 2c 接口获取到的数据格式[2]是这样的:
#Obj,i2c_slave_address,result_number,temperature,number_valid_results,device_ticks,distance0_in_mm,confidence0,distance1_in_mm,confidence1,distance2_in_mm,confidence2, ...
其中最关键的数据是后面的 distancex_in_mm 和 confidencex。分别表示距离和置信度。置信度越高,对应测量出来的距离就越可靠。
到这里为止,所有的数据处理都是传感器内部完成的。用户拿到了距离+置信度的护具之后,就可以根据需要实现对应的算法。
手势识别算法
在实现手势识别算法之前,我写了一个简单的脚本对前面接收到的距离和置信度数据进行处理[3],将其可视化并且将置信度较低的数据过滤掉之后,就得到了下面的效果:
图中的 9 个圆柱的高度表示传感器的 9 个区域检测到的距离。可以看到,虽然只提供了 9 个点的距离值,但是数据的更新速率和响应速度还是比较好的,可以轻松支持实现距离检测和手势识别的功能。
下面是我实现的手势检测的算法。原理是对于每一帧数据,根据各个点的高度计算质心,来推断“手”所在的位置。通过计算连续的数据中的质心的变化方向,来计算手移动的方向,代码如下:
char determine_direction(std::deque<std::pair<std::vector<uint16_t>, std::vector<uint8_t>>> &buffer) {
if (buffer.size() < 3) {
return '-';
}
// Only consider objects within 100mm for direction detection
const int max_distance_for_direction = 100;
std::vector<std::pair<float, float>> centroids;
for (const auto &frame : buffer) {
const auto &distances = frame.first;
std::vector<float> x_coords, y_coords;
for (size_t i = 0; i < distances.size(); ++i) {
// Only consider points within the maximum distance threshold
if (distances[i] > 0 && distances[i] <= max_distance_for_direction) {
x_coords.push_back(i % 3);
y_coords.push_back(i / 3);
}
}
if (!x_coords.empty() && !y_coords.empty()) {
float g_x = std::accumulate(x_coords.begin(), x_coords.end(), 0.0f) / x_coords.size();
float g_y = std::accumulate(y_coords.begin(), y_coords.end(), 0.0f) / y_coords.size();
centroids.emplace_back(g_x, g_y);
}
}
// If we don't have enough valid centroids (close objects), return without direction update
if (centroids.size() < 3) {
return '-';
}
std::vector<float> indices(centroids.size());
std::iota(indices.begin(), indices.end(), 0);
float x_mean = std::accumulate(indices.begin(), indices.end(), 0.0f) / indices.size();
float y_mean = std::accumulate(centroids.begin(), centroids.end(), 0.0f, [](float sum, const std::pair<float, float>& p) { return sum + p.first; }) / centroids.size();
float x_slope = std::inner_product(indices.begin(), indices.end(), centroids.begin(), 0.0f,
std::plus<>(), [x_mean, y_mean](float a, const std::pair<float, float> &b) { return (a - x_mean) * (b.first - y_mean); }) /
std::inner_product(indices.begin(), indices.end(), indices.begin(), 0.0f, std::plus<>(), [x_mean](float a, float b) { return (a - x_mean) * (b - x_mean); });
y_mean = std::accumulate(centroids.begin(), centroids.end(), 0.0f, [](float sum, const std::pair<float, float>& p) { return sum + p.second; }) / centroids.size();
float y_slope = std::inner_product(indices.begin(), indices.end(), centroids.begin(), 0.0f,
std::plus<>(), [x_mean, y_mean](float a, const std::pair<float, float> &b) { return (a - x_mean) * (b.second - y_mean); }) /
std::inner_product(indices.begin(), indices.end(), indices.begin(), 0.0f, std::plus<>(), [x_mean](float a, float b) { return (a - x_mean) * (b - x_mean); });
char new_arrow = get_arrow(x_slope, y_slope);
char filtered_arrow = direction_filter.update(new_arrow);
return filtered_arrow;
}
相关链接
完整的项目代码:
https://github.com/ixbwer/rp2040-tmf8821/tree/master
活动报告:
https://www.eetree.cn/project/detail/3860
本文版权归作者:ixbwer所有,转载请注明原文链接:https://www.cnblogs.com/ixbwer/p/19001142,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号