SFM(Structure from Motion)总结(二)
接下来我们介绍一下 Perspective SFM
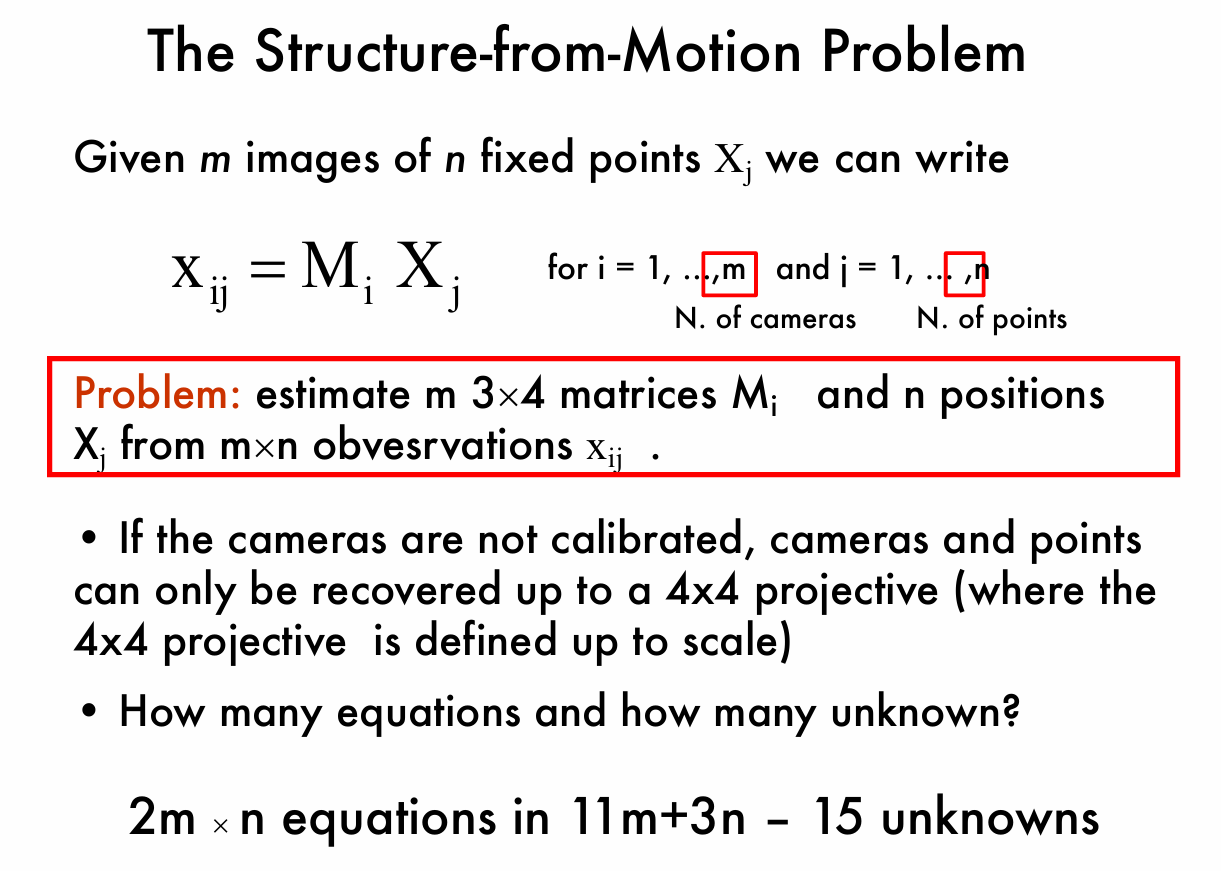
与 affine SFM 不同,这里的 \(x_{ij}\) 无法直接表示为 \(A_iX_j+b_i\) 的形式,我们只能从它最根本的定义出发,即 \(x_{ij}=M_iX_j\) 得到,因此 Perspective SFM 需要求解的问题是通过已知的观测点信息估计相机矩阵 \(M\) 和 3D点 \(X\)。
对于每个观测值 \(x_{ij}\) 有 \(2\) 个坐标(因为图像点是二维的),所以总共有 \(2mn\) 个方程。
每个 \(3×4\) 的相机投影矩阵 \(M_i\) 有 \(12\) 个参数,但存在尺度等价性,所以每个 \(M_i\) 有 $11$ 个独立参数,\(m\) 个矩阵共有 \(11m\) 个参数;每个三维点 \(X_j\) 有 \(3\) 个坐标,\(n\) 个点共有 \(3n\) 个参数。
同时由于投影变换也存在投影歧义,如果相机未校准,相机和点只能恢复到一个 \(4×4\) 的投影变换,其自由度为15,因此我们共有 \(11m+3n-15\) 个未知数。
相当于我们需要用 \(2mn\) 个方程求解 \(11m+3n-15\) 个未知数。
像这样从一个投影变换恢复度量重建的问题称为自标定(self-calibration)
我们先解决第一个问题:如何从运动结构恢复到投影歧义,这里我们介绍 \(3\) 种方法。
代数方法(Algebraic approach)
这里以两视图为例,该方法共有 \(3\) 个步骤:
\(\bullet\) 从两视图中计算基础矩阵 \(F\)
\(\bullet\) 用 \(F\) 估计投影相机
\(\bullet\) 使用这些摄影机在3D中三角化和估计点
首先第一步我们需要计算基础矩阵 \(F\),这里我们一般采用八点法进行计算,从至少 \(8\) 个点的对应关系中得到基础矩阵 \(F\)。
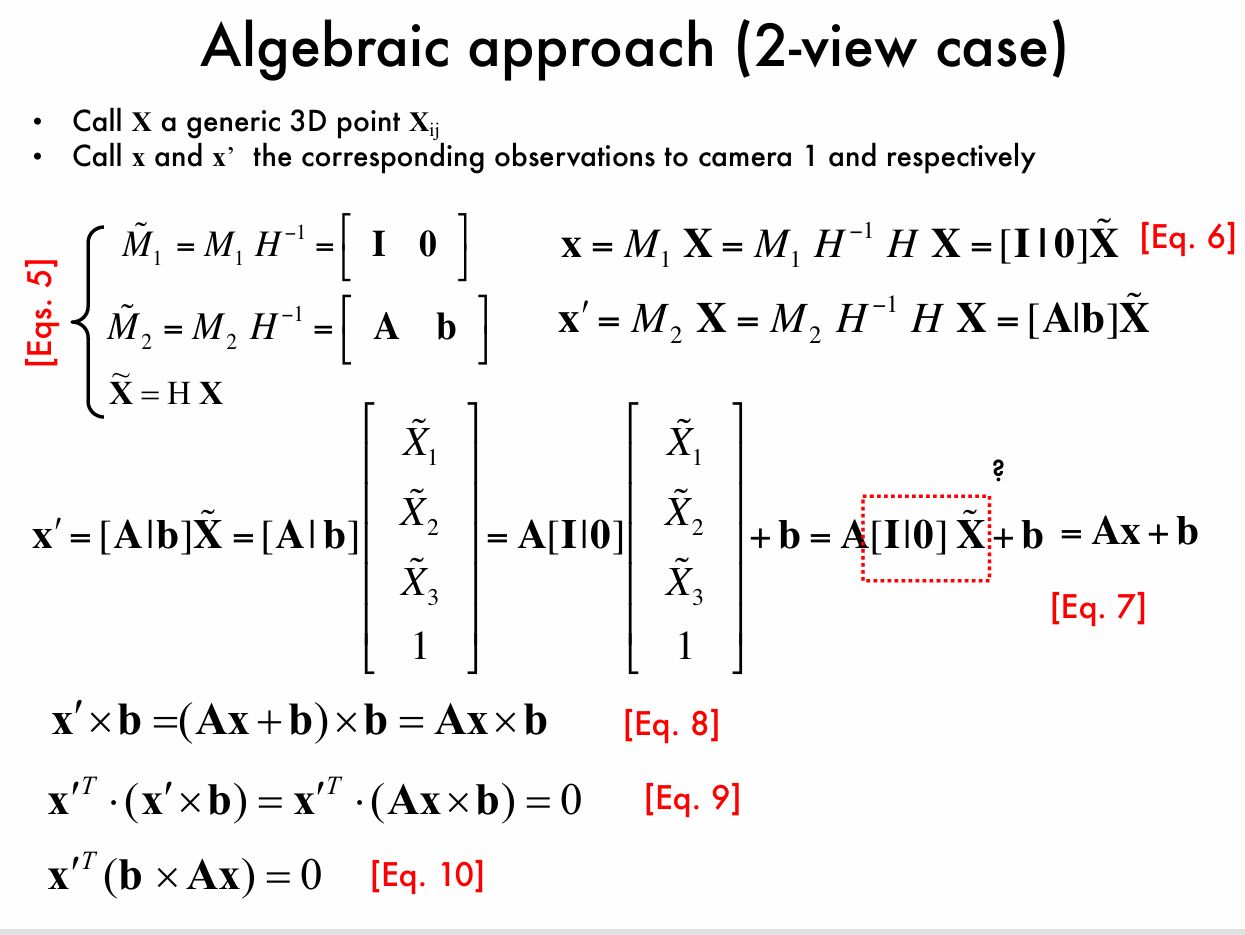
第二步是用 \(F\) 估计投影相机,由于存在投影歧义性,我们总可以应用一个投影变换 \(H\) ,使得经过投影变换后 \(M_1H^{-1}=[I,0]\),即变换为规范透视相机的形式,而 \(M_2H^{-1}=[A,b]\),这种变换有助于简化相机投影矩阵的形式,以便于后续的计算和分析。
我们规定将一般的三维点记为 \(X_{ij}\),用 \(X\) 表示;相机 1 和相机 2 对应的观测点分别记为 \(x\) 和 \(x'\)。
同时我们定义变换后的投影矩阵 $\tilde{M}_1 = M_1H^{-1}=[I\ 0] $ 和 \(\tilde{M}_2 = M_2H^{-1}=[A\ b]\),同时 \(\tilde{X}=HX\)。由此得到 \(x=M_1X=M_1H^{-1}HX=[I,0]\tilde{X}\) 和 \(x'=M_2X=M_2H^{-1}HX=[A,b]\tilde{X}\) 。
我们可以把 \(x'=[A,b]\tilde{X}\) 进一步展开,其中 \(\tilde{X}\) 是齐次坐标的形式 \(\begin{bmatrix}\tilde{X}_1\\\tilde{X}_2\\\tilde{X}_3\\1\end{bmatrix}\),通过矩阵运算得到 \(x'=A[I,0]\tilde{X}+b=Ax+b\) 。
基于此公式我们可以进一步进行推导,我们对 \(x'\) 和 \(b\) 进行叉积运算得到 \(x'×b=(Ax+b)×b=Ax×b\)。
然后我们对公式两边左乘一个 \(x'^T\),得到 \(x'^T·(x'×b)=x'^T·(Ax×b)=0\),从而得到 \(x'^T·(b×Ax)=0\)。
进一步,我们可以将叉乘写成矩阵形式,如图所示:

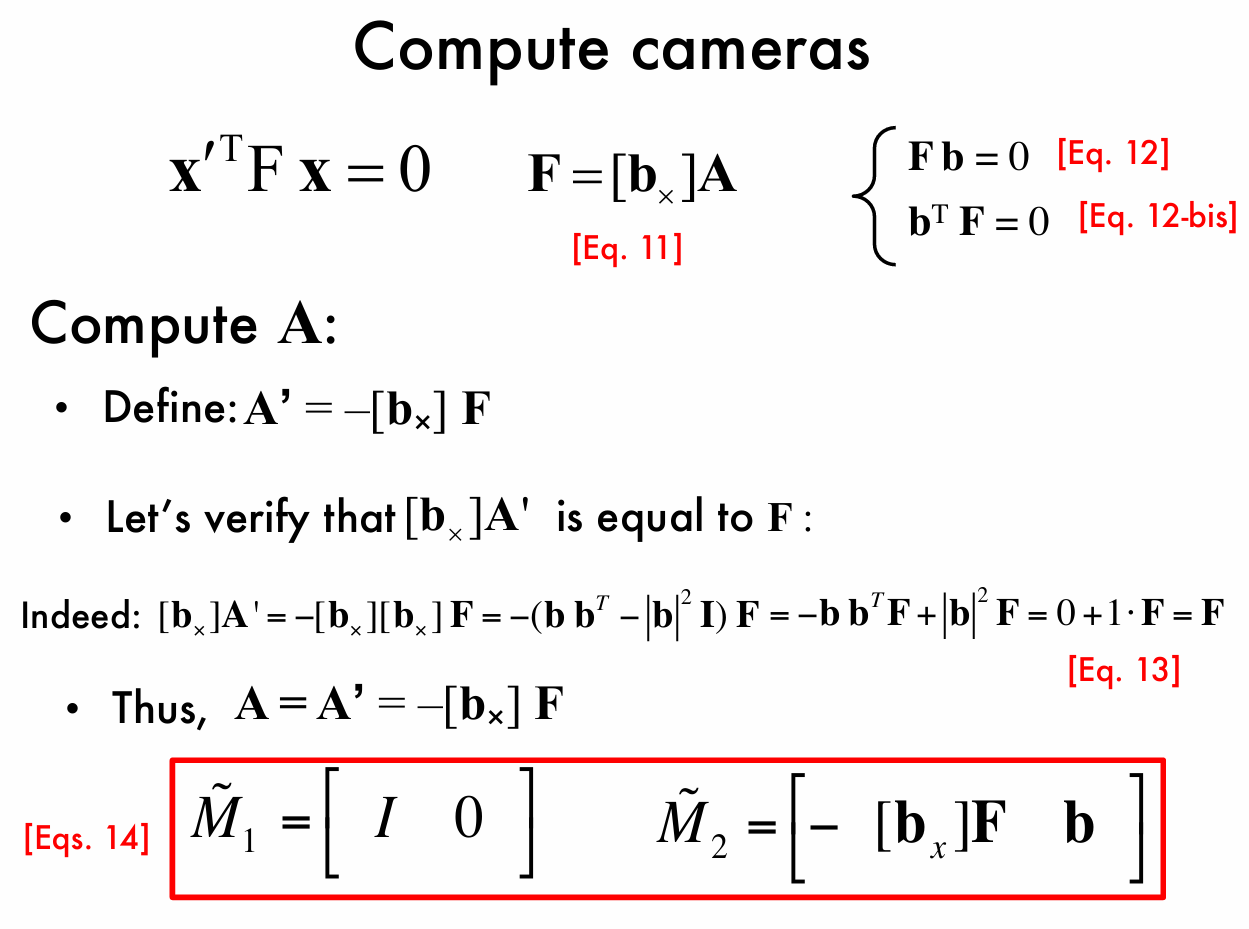
从而可以得到 \(x'^T[b_×]Ax=0\),这种形式是不是很熟悉呢?回想基础矩阵的性质有 \(x'^TFx=0\),所以我们能够得到 \(F=[b_×]A=b×A\)。
但是如果我们将 \(F\) 与 \(b\) 点乘,则有 \(Fb=[b_×]A·b=0\),所以我们得到的 \(F\) 矩阵还应满足 \(Fb=0\) 这一条件。
由于基础矩阵 \(F\) 是奇异矩阵(singular),可以通过奇异值分解(SVD)来计算满足 \(Fb = 0\) 且 \(|b| = 1\) 的向量 \(b\) 的最小二乘解。
通过类似推导,还能得到 \(b^TF=0\) ,进一步补充了向量 \(b\) 与基础矩阵 \(F\) 的转置之间的关系。
那我们应该如何计算 \(A\) 呢?
首先我们定义 \({A}' = -[{b}_{\times}]F\)
然后我们验证 \([b_{\times}]A'\) 是否等于 \(F\) 。通过矩阵运算: \([b_{\times}]A'=-[b_{\times}][b_{\times}]F=-(bb^T-|b|^2I)F=-bb^TF+|b|^2F\),由于 \(Fb=0\) 且 \(|b|=1\),所以 \(-bb^TF+|b|^2F=0+1·F=F\)。
从而我们能够得出 \(A=A'=-[{b}_{\times}]F\),这样我们就能计算出 \(A\) 了。
进一步,我们可以根据前面的计算结果,得到变换后的相机投影矩阵 \(\tilde{M}_1 = [I,0]\) 和 \(\tilde{M}_2 = [-[{b}_{\times}]F,b]\) 。
现在的问题是应该如何求解 \(b\) 呢?
回想一下对极几何中的一些性质,如图所示:
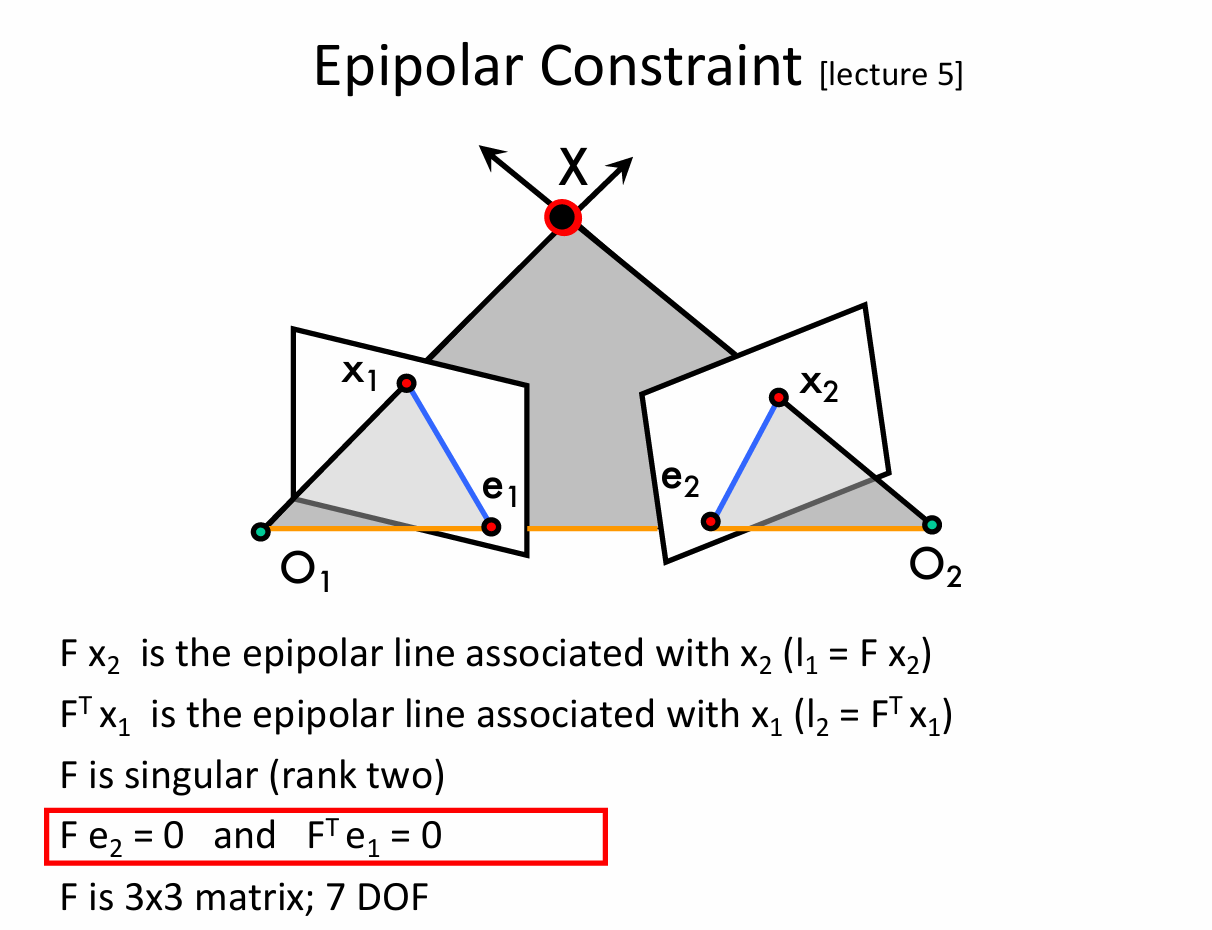
前面我们已知了 \(Fb=0\) 而 对极约束方程中恰好有 \(Fe_2=0\),这告诉我们 \(b\) 其实是极点,所以我们又能够把相机投影矩阵写成如下形式:
\(\tilde{M}_1 = [I,0]\) 和 \(\tilde{M}_2 = [-[{e}_{\times}]F,e]\)
这样就完成了投影相机的估计。
第三步是使用这些摄影机在3D中三角化和估计点,我们已经知道了3D点和观测点之间的对应关系,还知道了投影相机矩阵,就能够通过奇异值分解求出3D点.
如果是在多视图中,我们可以从任意两个视图 \(I_k\) 和 \(I_h\) 出发,可以计算得到对应的投影矩阵 \(\tilde{M}_k\)、\(\tilde{M}_h\) 以及三维点 ,这些结果组合在一起就构成了多视图重建的结果。
因式分解(Factorization method)
与 affine SFM 中类似,这里不过多赘述。
以上两种方法都存在一定局限性:
对于因式分解方法,它假定所有的点都是可见的。但在以下情况该假设不成立:
\(\bullet\) 当出现遮挡时,部分点可能被其他物体遮挡而无法在图像中观测到。
\(\bullet\) 当在建立对应关系时失败,例如由于特征提取不准确或图像质量问题等,导致无法正确匹配不同视图中的点。
而代数方法主要适用于两视图的情况,对于更多视图的处理能力有限。
因此,人们提出了第三种方法:光束平差法(the bundle adjustment approach),该方法能够解决上述部分局限性。它可以在一定程度上处理遮挡和对应关系建立不准确等问题,通过优化所有相机参数和三维点位置来提高重建精度,是一种更综合和有效的优化方法。
光束平差法(Bundle adjustment)
光束平差法是一种用于优化结构和运动的非线性方法,其核心目标是最小化重投影误差。重投影误差的计算公式为 \(E(M,X) = \sum_{i = 1}^{m}\sum_{j = 1}^{n}D(x_{ij}, M_iX_j)^2\) 。其中,\(m\) 表示相机数量,\(n\) 表示三维点数量,\(x_{ij}\) 是图像上观测到的二维点,\({M}_i\) 是第 \(i\) 个相机的投影矩阵,\({X}_j\) 是第 \(j\) 个三维点,\(D(\cdot)\) 衡量了观测点 \(x_{ij}\) 和三维点 \({X}_j\) 通过投影矩阵 ${M}_i$ 投影到图像上的点之间的距离。
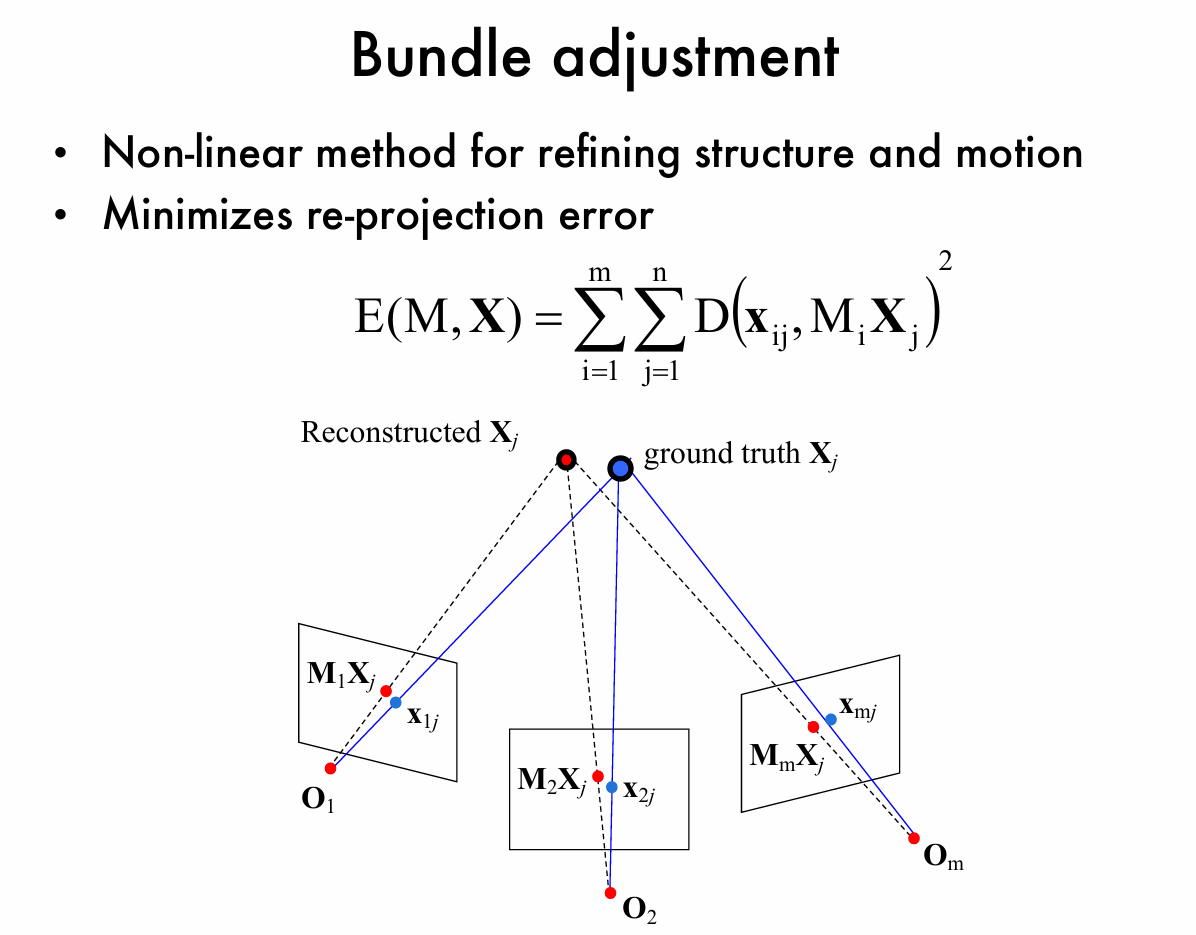
图中展示了多个相机\((\mathbf{O}_1\)、\(\mathbf{O}_2\)、\(\mathbf{O}_m\))对三维点的观测情况。蓝色部分表示真实情况,即真实的三维点 \(\mathbf{X}_j\) 通过相机投影矩阵 \({M}_i\) 投影到图像上得到的点(如 \({M}_1{X}_j\)、\({M}_2{X}_j\)、\({M}_m{X}_j\) )与图像上观测到的点 \({x}_{ij}\) 的理想对应关系。红色部分表示重建情况,即重建的三维点(Reconstructed \({X}_j\)) 投影到图像上的点与观测点之间存在偏差。光束平差法通过调整相机参数(投影矩阵 \({M}_i\) )和三维点位置 \({X}_j\) ,来缩小这种偏差,从而最小化重投影误差。
为了解决这一问题,我们有两种求解办法:
\(\bullet\) 牛顿法(Newton Method):是一种迭代算法,需要计算雅可比矩阵 \(J\) 和海森矩阵 \(H\)
\(\bullet\) 列文伯格 - 马夸尔特算法(Levenberg - Marquardt Algorithm):同样是迭代算法,从初始解开始进行迭代计算。该算法具有以下特点:
1.如果初始解距离真实解较远,算法可能收敛较慢。
2.估计的解可能依赖于初始解。
3.与牛顿法不同,它不需要计算海森矩阵 \(H\) ,在一定程度上简化了计算过程。
最后我们总结一下光束平差法的优缺点以及应用场景:
优点
- 处理大量视图:能够处理大量的视图数据(Handle large number of views),在多视图的场景下具有较好的适用性。
- 处理缺失数据:可以应对数据缺失的情况(Handle missing data),在实际应用中,当部分数据由于各种原因(如遮挡等)缺失时,光束平差法仍能发挥作用。
局限性
- 大规模最小化问题:存在大规模的最小化问题,因为随着视图数量的增加,需要优化的参数也会相应增多),这会导致计算复杂度大幅上升。
- 依赖良好初始条件:需要一个较好的初始条件,如果初始值设置不合理,可能会导致算法收敛缓慢甚至无法收敛到最优解。
应用场景
- 作为SfM的最终步骤:通常被用作运动恢复结构的最后一步之后。
- 提供初始解:分解法或代数法可以为光束平差法的优化问题提供一个初始解,在此基础上,光束平差法通过迭代优化来进一步提高重建的精度。
自标定(Self - calibration)
定义:自标定是从透视(或仿射)重建中恢复度量重建的问题。在计算机视觉的三维重建中,透视(或仿射)重建通常能得到物体的形状和结构,但缺乏真实的尺度和度量信息;而度量重建则能提供具有真实尺度和几何度量的三维模型,自标定的目标就是在没有外部标定设备的情况下,从前者恢复出后者。
方法:可以通过对相机做出一些假设来进行相机自标定。这些假设可能涉及相机的内参特性,例如假设相机的焦距固定、图像传感器的像素是正方形等,基于这些假设来推导出相机的内参和外参,从而实现自标定。更具体的方法有:
单视图度量约束法:使用单视图度量约束(single - view metrology constraints),该方法利用单幅图像中的一些几何度量信息,例如平行线、相似三角形等关系,来对相机进行自标定。
直接法(基于 Kruppa 方程):对于两个视图的情况,采用直接法(Direct approach),即基于 Kruppa 方程(Kruppa Eqs) 。Kruppa 方程建立了两个视图之间的内参关系,通过求解这些方程可以得到相机的内参,从而实现自标定。
代数法:通过代数方法(Algebraic approach)来进行相机自标定。通常涉及到对相机投影模型的代数运算和推导,利用多视图之间的几何关系建立代数方程,进而求解相机参数。
分层法:采用分层方法(Stratified approach),该方法可能将自标定过程分为多个层次或阶段,逐步从低层次的几何信息(如仿射几何)过渡到高层次的度量几何信息,以实现相机的自标定。
后面几种做法较复杂这里不过多赘述,感兴趣请自行查阅相关资料。
以上就是对SFM相关内容的介绍,如有错误,请指正。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号