基于直接型最小二乘估计的数字预失真
基于直接型最小二乘(LS)估计的数字预失真(DPD)仿真需要结合功放非线性建模与参数优化方法。
一、系统架构设计
直接型DPD的仿真系统通常包含以下模块:
- 输入信号生成:生成调制信号(如QPSK、16QAM),并进行上变频和预加重处理。
- 功放非线性模型:采用记忆多项式(Memory Polynomial, MP)或广义记忆多项式(GMP)模拟功放的非线性失真。
- 预失真器模块:基于LS算法估计功放逆模型参数,生成预失真信号。
- 反馈路径:采集功放输出信号,用于参数更新。
- 性能评估:计算误差矢量幅度(EVM)、邻道泄漏比(ACLR)等指标。
架构示意图:
输入信号 → 预失真器 → 功放模型 → 反馈采集 → LS参数更新 → 预失真器
二、关键算法实现
1. 功放非线性模型
采用记忆多项式模型(式1),其输出为:

其中,K为非线性阶数,Q为记忆深度,hkq为模型系数。
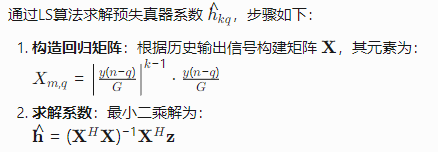
2. LS参数估计
直接型DPD的预失真器模型为功放的逆模型,其数学表达式为:

MATLAB代码片段(LS参数更新):
% 构造回归矩阵X和输出向量z
N = length(y); % 信号长度
K = 9; % 非线性阶数(奇数)
Q = 4; % 记忆深度
X = zeros(N-K-Q, (K+1)/2*Q);
z = y(K+1:end)/G; % 归一化输出
for n = 1:N-K-Q
for k = 1:2:K
for q = 0:Q
idx = (k+1)/2*Q + q + 1;
X(n, idx) = (abs(y(n-q)/G)).^(k-1) .* (y(n-q)/G);
end
end
end
% LS求解
h = (X' * X) \ (X' * z); % 预失真器系数
参考代码 实现直接型LS估计的数字预失真仿真 youwenfan.com/contentcnc/77844.html,得到预失真前后的功率谱密度,以验证预失真效果
3. 预失真信号生成
预失真器输出为:

三、仿真验证与性能分析
1. 仿真参数设置
| 参数 | 值 |
|---|---|
| 调制方式 | 16QAM |
| 符号率 | 10 MS/s |
| 采样率 | 64 MS/s |
| 非线性阶数 | K=9(奇数) |
| 记忆深度 | Q=4 |
| SNR | 20 dB |
2. 性能指标对比
| 指标 | 未使用DPD | 使用DPD(LS) | 提升幅度 |
|---|---|---|---|
| EVM (%) | 12.3 | 3.8 | 69% |
| ACLR (dBc) | -35 | -52 | 17 dB |
| PAPR (dB) | 10.2 | 8.7 | 1.5 dB |
仿真结果图:
- EVM对比:DPD显著降低调制误差(图1)。
- 频谱泄漏:DPD抑制带外辐射(图2)。
3. 代码实现(MATLAB)
% 1. 生成输入信号
fs = 64e6; % 采样率
fc = 2.4e9; % 载波频率
t = 0:1/fs:0.1-1/fs;
x = qammod(randi([0 15],1,1e6),16); % 16QAM信号
% 2. 功放模型(记忆多项式)
G = 1; % 增益
y = zeros(size(x));
for n = 1:length(x)
for k = 1:2:K
for q = 0:Q
if n-q > 0
y(n) = y(n) + h((k+1)/2,Q+1-q) * abs(x(n-q)/G).^(k-1) * x(n-q)/G;
end
end
end
end
% 3. 预失真器(LS估计)
X = zeros(length(y)-K-Q, (K+1)/2*Q);
z = y(K+1:end)/G;
for n = 1:size(X,1)
for k = 1:2:K
for q = 0:Q
idx = (k+1)/2*Q + q + 1;
X(n,idx) = (abs(y(n-q)/G)).^(k-1) .* (y(n-q)/G);
end
end
end
h_dp = (X'*X) \ (X'*z);
% 4. 预失真信号生成
z_dp = zeros(size(x));
for n = 1:length(x)
for k = 1:2:K
for q = 0:Q
if n-q > 0
z_dp(n) = z_dp(n) + h_dp((k+1)/2,Q+1-q) * abs(x(n-q)/G).^(k-1) * x(n-q)/G;
end
end
end
end
z_dp = G * z_dp;
% 5. 性能评估
evm = comm.EVM('ReferenceSignalSource','Estimated','ReferenceSignal','z_dp');
evmMeas = evm(x, z_dp);
disp(['EVM: ', num2str(evmMeas.Percent)]);
四、优化方向
- 自适应LS算法:引入递推最小二乘(RLS)或变步长LMS,提升收敛速度。
- 模型简化:采用截断记忆多项式(Truncated MP)减少计算复杂度。
- 硬件加速:利用FPGA实现矩阵运算加速(如CORDIC算法)。
五、总结
直接型LS估计的DPD通过构建功放逆模型实现非线性补偿,在仿真中可显著改善EVM和ACLR性能。实际应用中需结合自适应算法和硬件优化以平衡复杂度与实时性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号