

2023/5/20
%%订阅IMU话题四元数数据
1.创建订阅者 订阅imu话题,消息格式:sensor_msgs/Imu
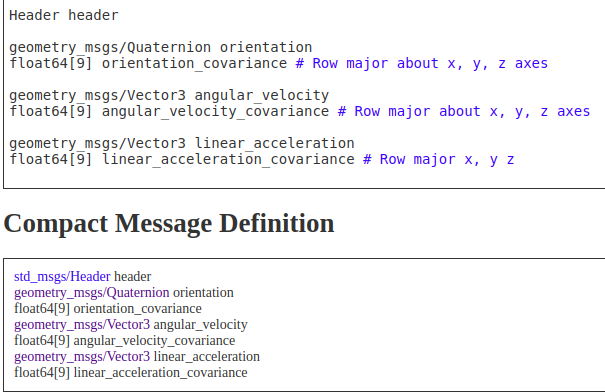
sensor_msgs/Imu消息格式:
订阅者:
ros::Subscriber imu_sub = n.subscribe("/imu/data",10,imucallback);2.imucallback回调函数处理四元数解算机器人方向
2.1声明个四元数对象并赋值:
tf::Quaternion quaternion(
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
);2.2通过四元数求滚转角,俯仰角,航向角:
tf::Matrix3x3(quaternion).getRPY(roll, pitch,yaw);2.3roll pitch yaw单位为弧度制,转换为角度
roll = roll*180/M_PI;3.打印消息
ROS_INFO("linear_x = %.0f, linear_y = %.0f, linear_z = %.0f",roll,pitch,yaw);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号