Livox mid-360:[ERROR] [livox_ros_driver2_node-1]: process has died [pid 35602
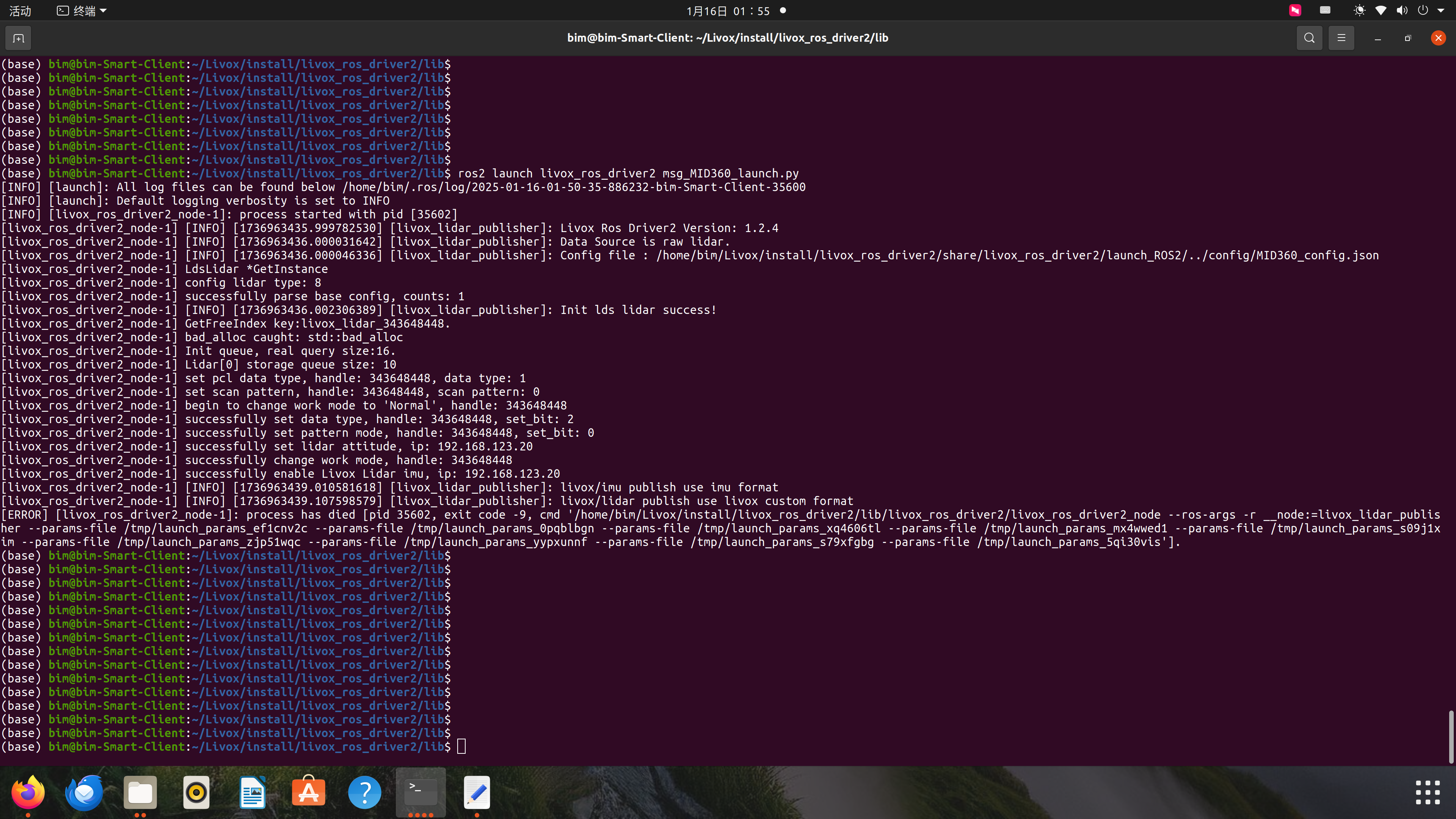
(base) bim@bim-Smart-Client:~/Livox/install/livox_ros_driver2/lib$ ros2 launch livox_ros_driver2 msg_MID360_launch.py
[INFO] [launch]: All log files can be found below /home/bim/.ros/log/2025-01-16-01-50-35-886232-bim-Smart-Client-35600
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [livox_ros_driver2_node-1]: process started with pid [35602]
[livox_ros_driver2_node-1] [INFO] [1736963435.999782530] [livox_lidar_publisher]: Livox Ros Driver2 Version: 1.2.4
[livox_ros_driver2_node-1] [INFO] [1736963436.000031642] [livox_lidar_publisher]: Data Source is raw lidar.
[livox_ros_driver2_node-1] [INFO] [1736963436.000046336] [livox_lidar_publisher]: Config file : /home/bim/Livox/install/livox_ros_driver2/share/livox_ros_driver2/launch_ROS2/../config/MID360_config.json
[livox_ros_driver2_node-1] LdsLidar *GetInstance
[livox_ros_driver2_node-1] config lidar type: 8
[livox_ros_driver2_node-1] successfully parse base config, counts: 1
[livox_ros_driver2_node-1] [INFO] [1736963436.002306389] [livox_lidar_publisher]: Init lds lidar success!
[livox_ros_driver2_node-1] GetFreeIndex key:livox_lidar_343648448.
[livox_ros_driver2_node-1] bad_alloc caught: std::bad_alloc
[livox_ros_driver2_node-1] Init queue, real query size:16.
[livox_ros_driver2_node-1] Lidar[0] storage queue size: 10
[livox_ros_driver2_node-1] set pcl data type, handle: 343648448, data type: 1
[livox_ros_driver2_node-1] set scan pattern, handle: 343648448, scan pattern: 0
[livox_ros_driver2_node-1] begin to change work mode to 'Normal', handle: 343648448
[livox_ros_driver2_node-1] successfully set data type, handle: 343648448, set_bit: 2
[livox_ros_driver2_node-1] successfully set pattern mode, handle: 343648448, set_bit: 0
[livox_ros_driver2_node-1] successfully set lidar attitude, ip: 192.168.123.20
[livox_ros_driver2_node-1] successfully change work mode, handle: 343648448
[livox_ros_driver2_node-1] successfully enable Livox Lidar imu, ip: 192.168.123.20
[livox_ros_driver2_node-1] [INFO] [1736963439.010581618] [livox_lidar_publisher]: livox/imu publish use imu format
[livox_ros_driver2_node-1] [INFO] [1736963439.107598579] [livox_lidar_publisher]: livox/lidar publish use livox custom format
[ERROR] [livox_ros_driver2_node-1]: process has died [pid 35602, exit code -9, cmd '/home/bim/Livox/install/livox_ros_driver2/lib/livox_ros_driver2/livox_ros_driver2_node --ros-args -r __node:=livox_lidar_publisher --params-file /tmp/launch_params_ef1cnv2c --params-file /tmp/launch_params_0pqblbgn --params-file /tmp/launch_params_xq4606tl --params-file /tmp/launch_params_mx4wwed1 --params-file /tmp/launch_params_s09j1xim --params-file /tmp/launch_params_zjp51wqc --params-file /tmp/launch_params_yypxunnf --params-file /tmp/launch_params_s79xfgbg --params-file /tmp/launch_params_5qi30vis'].
(base) bim@bim-Smart-Client:~/Livox/install/livox_ros_driver2/lib$
#######################

 浙公网安备 33010602011771号
浙公网安备 33010602011771号