ros1 realsense d435i kinova jaco2手眼标定
cd catkin_ws
bim@bim-Vostro-7570:~$ bim@bim-Vostro-7570:~$ ls catkin_ws Downloads Public Videos catkin_ws_backup_2024012601tar.gz examples.desktop REALSENSE Desktop Music ROS_WS_2024012501 Documents Pictures Templates bim@bim-Vostro-7570:~$ bim@bim-Vostro-7570:~$ bim@bim-Vostro-7570:~$ bim@bim-Vostro-7570:~$ cd catkin_ws bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
sudo apt-get install ros-melodic-aruco-ros


bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-aruco-ros [sudo] password for bim: Reading package lists... Done Building dependency tree Reading state information... Done The following additional packages will be installed: ros-melodic-aruco ros-melodic-aruco-msgs The following NEW packages will be installed: ros-melodic-aruco ros-melodic-aruco-msgs ros-melodic-aruco-ros 0 upgraded, 3 newly installed, 0 to remove and 35 not upgraded. Need to get 632 kB of archives. After this operation, 2,293 kB of additional disk space will be used. Do you want to continue? [Y/n] y Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-aruco amd64 2.2.2-1bionic.20221128.182641 [320 kB] Get:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-aruco-msgs amd64 2.2.2-1bionic.20221128.182636 [19.1 kB] Get:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-aruco-ros amd64 2.2.2-1bionic.20221128.183326 [293 kB] Fetched 632 kB in 0s (8,639 kB/s) Selecting previously unselected package ros-melodic-aruco. (Reading database ... 255637 files and directories currently installed.) Preparing to unpack .../ros-melodic-aruco_2.2.2-1bionic.20221128.182641_amd64.deb ... Unpacking ros-melodic-aruco (2.2.2-1bionic.20221128.182641) ... Selecting previously unselected package ros-melodic-aruco-msgs. Preparing to unpack .../ros-melodic-aruco-msgs_2.2.2-1bionic.20221128.182636_amd64.deb ... Unpacking ros-melodic-aruco-msgs (2.2.2-1bionic.20221128.182636) ... Selecting previously unselected package ros-melodic-aruco-ros. Preparing to unpack .../ros-melodic-aruco-ros_2.2.2-1bionic.20221128.183326_amd64.deb ... Unpacking ros-melodic-aruco-ros (2.2.2-1bionic.20221128.183326) ... Setting up ros-melodic-aruco-msgs (2.2.2-1bionic.20221128.182636) ... Setting up ros-melodic-aruco (2.2.2-1bionic.20221128.182641) ... Setting up ros-melodic-aruco-ros (2.2.2-1bionic.20221128.183326) ... bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
sudo apt-get install ros-melodic-visp-hand2eye-calibration
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-visp-hand2eye-calibration Reading package lists... Done Building dependency tree Reading state information... Done The following additional packages will be installed: ros-melodic-visp-bridge The following NEW packages will be installed: ros-melodic-visp-bridge ros-melodic-visp-hand2eye-calibration 0 upgraded, 2 newly installed, 0 to remove and 35 not upgraded. Need to get 132 kB of archives. After this operation, 794 kB of additional disk space will be used. Do you want to continue? [Y/n] y Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-visp-bridge amd64 0.13.0-1bionic.20221025.190257 [51.4 kB] Get:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-visp-hand2eye-calibration amd64 0.13.0-1bionic.20221025.194449 [80.4 kB] Fetched 132 kB in 0s (4,722 kB/s) Selecting previously unselected package ros-melodic-visp-bridge. (Reading database ... 255757 files and directories currently installed.) Preparing to unpack .../ros-melodic-visp-bridge_0.13.0-1bionic.20221025.190257_amd64.deb ... Unpacking ros-melodic-visp-bridge (0.13.0-1bionic.20221025.190257) ... Selecting previously unselected package ros-melodic-visp-hand2eye-calibration. Preparing to unpack .../ros-melodic-visp-hand2eye-calibration_0.13.0-1bionic.20221025.194449_amd64.deb ... Unpacking ros-melodic-visp-hand2eye-calibration (0.13.0-1bionic.20221025.194449) ... Setting up ros-melodic-visp-bridge (0.13.0-1bionic.20221025.190257) ... Setting up ros-melodic-visp-hand2eye-calibration (0.13.0-1bionic.20221025.194449) ... bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
sudo apt-get install ros-melodic-rgbd-launch
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-rgbd-launch
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following NEW packages will be installed:
ros-melodic-rgbd-launch
0 upgraded, 1 newly installed, 0 to remove and 35 not upgraded.
Need to get 9,104 B of archives.
After this operation, 55.3 kB of additional disk space will be used.
Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-rgbd-launch amd64 2.2.2-0bionic.20221025.200856 [9,104 B]
Fetched 9,104 B in 0s (556 kB/s)
Selecting previously unselected package ros-melodic-rgbd-launch.
(Reading database ... 255854 files and directories currently installed.)
Preparing to unpack .../ros-melodic-rgbd-launch_2.2.2-0bionic.20221025.200856_amd64.deb ...
Unpacking ros-melodic-rgbd-launch (2.2.2-0bionic.20221025.200856) ...
Setting up ros-melodic-rgbd-launch (2.2.2-0bionic.20221025.200856) ...
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
catkin_make
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ catkin_make Base path: /home/bim/catkin_ws Source space: /home/bim/catkin_ws/src Build space: /home/bim/catkin_ws/build Devel space: /home/bim/catkin_ws/devel Install space: /home/bim/catkin_ws/install #### #### Running command: "make cmake_check_build_system" in "/home/bim/catkin_ws/build" #### -- Using CATKIN_DEVEL_PREFIX: /home/bim/catkin_ws/devel -- Using CMAKE_PREFIX_PATH: /home/bim/catkin_ws/devel;/opt/ros/melodic -- This workspace overlays: /home/bim/catkin_ws/devel;/opt/ros/melodic -- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2") -- Using PYTHON_EXECUTABLE: /usr/bin/python2 -- Using Debian Python package layout -- Using empy: /usr/bin/empy -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /home/bim/catkin_ws/build/test_results -- Found gtest sources under '/usr/src/googletest': gtests will be built -- Found gmock sources under '/usr/src/googletest': gmock will be built -- Found PythonInterp: /usr/bin/python2 (found version "2.7.17") -- Using Python nosetests: /usr/bin/nosetests-2.7 -- catkin 0.7.29 -- BUILD_SHARED_LIBS is on -- BUILD_SHARED_LIBS is on -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- ~~ traversing 20 packages in topological order: -- ~~ - kinova_bringup -- ~~ - kinova_control -- ~~ - kinova_gazebo -- ~~ - realsense2_description -- ~~ - ddynamic_reconfigure -- ~~ - kinova_msgs -- ~~ - kinova_driver -- ~~ - kinova_demo -- ~~ - realsense2_camera -- ~~ - j2n6s300_ikfast -- ~~ - j2s6s300_ikfast -- ~~ - j2s7s300_ikfast -- ~~ - m1n6s300_ikfast -- ~~ - aruco_hand_eye -- ~~ - kinova_arm_moveit_demo -- ~~ - kinova_description -- ~~ - j2n6s300_moveit_config -- ~~ - j2s6s300_moveit_config -- ~~ - j2s7s300_moveit_config -- ~~ - m1n6s300_moveit_config -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- +++ processing catkin package: 'kinova_bringup' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_bringup) -- +++ processing catkin package: 'kinova_control' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_control) -- +++ processing catkin package: 'kinova_gazebo' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_gazebo) -- +++ processing catkin package: 'realsense2_description' -- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_description) -- +++ processing catkin package: 'ddynamic_reconfigure' -- ==> add_subdirectory(ddynamic_reconfigure-0.4.1) -- +++ processing catkin package: 'kinova_msgs' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_msgs) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- Generating .msg files for action kinova_msgs/ArmJointAngles /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/ArmJointAngles.action -- Generating .msg files for action kinova_msgs/ArmPose /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/ArmPose.action -- Generating .msg files for action kinova_msgs/Arm_KinovaPose /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/Arm_KinovaPose.action -- Generating .msg files for action kinova_msgs/SetFingersPosition /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/SetFingersPosition.action -- kinova_msgs: 37 messages, 12 services -- +++ processing catkin package: 'kinova_driver' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_driver) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- +++ processing catkin package: 'kinova_demo' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_demo) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- +++ processing catkin package: 'realsense2_camera' -- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_camera) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- Create Release Build. -- realsense2_camera: 3 messages, 1 services -- +++ processing catkin package: 'j2n6s300_ikfast' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- A library with BLAS API found. -- A library with LAPACK API found. -- +++ processing catkin package: 'j2s6s300_ikfast' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- A library with BLAS API found. -- A library with LAPACK API found. -- +++ processing catkin package: 'j2s7s300_ikfast' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- A library with BLAS API found. -- A library with LAPACK API found. -- +++ processing catkin package: 'm1n6s300_ikfast' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- A library with BLAS API found. -- A library with LAPACK API found. -- +++ processing catkin package: 'aruco_hand_eye' -- ==> add_subdirectory(aruco_hand_eye-master) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- +++ processing catkin package: 'kinova_arm_moveit_demo' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- Boost version: 1.65.1 -- Found the following Boost libraries: -- system -- filesystem -- date_time -- thread -- chrono -- atomic -- +++ processing catkin package: 'kinova_description' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_description) -- +++ processing catkin package: 'j2n6s300_moveit_config' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2n6s300_moveit_config) -- +++ processing catkin package: 'j2s6s300_moveit_config' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2s6s300_moveit_config) -- +++ processing catkin package: 'j2s7s300_moveit_config' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2s7s300_moveit_config) -- +++ processing catkin package: 'm1n6s300_moveit_config' -- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/robot_configs/m1n6s300_moveit_config) -- Configuring done -- Generating done -- Build files have been written to: /home/bim/catkin_ws/build #### #### Running command: "make -j8 -l8" in "/home/bim/catkin_ws/build" #### [ 0%] Built target ddynamic_reconfigure [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionResult [ 0%] Built target _kinova_msgs_generate_messages_check_deps_PoseVelocityWithFingers [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ZeroTorques [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Start [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetNullSpaceModeState [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseAction [ 0%] Built target _kinova_msgs_generate_messages_check_deps_CartesianForce [ 0%] Built target geometry_msgs_generate_messages_py [ 0%] Built target _kinova_msgs_generate_messages_check_deps_JointAngles [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseActionGoal [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionFeedback [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseFeedback [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionResult [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionResult [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesResult [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesAction [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetEndEffectorOffset [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionGoal [ 0%] Built target _kinova_msgs_generate_messages_check_deps_PoseVelocityWithFingerVelocity [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesFeedback [ 0%] Built target _kinova_msgs_generate_messages_check_deps_KinovaPose [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseResult [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetTorqueControlParameters [ 0%] Built target actionlib_msgs_generate_messages_py [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseGoal [ 0%] Built target _kinova_msgs_generate_messages_check_deps_FingerPosition [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetForceControlParams [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ClearTrajectories [ 0%] Built target _kinova_msgs_generate_messages_check_deps_JointTorque [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionResult [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetTorqueControlMode [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionAction [ 0%] Built target _kinova_msgs_generate_messages_check_deps_JointVelocity [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseActionResult [ 0%] Built target _kinova_msgs_generate_messages_check_deps_AddPoseToCartesianTrajectory [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionGoal [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionGoal [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseGoal [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionFeedback [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseAction [ 0%] Built target _kinova_msgs_generate_messages_check_deps_HomeArm [ 0%] Built target _kinova_msgs_generate_messages_check_deps_PoseVelocity [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseActionFeedback [ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionFeedback [ 0%] Built target _kinova_msgs_generate_messages_check_deps_RunCOMParametersEstimation [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseFeedback [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionGoal [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionFeedback [ 0%] Built target actionlib_msgs_generate_messages_cpp [ 0%] Built target geometry_msgs_generate_messages_cpp [ 0%] Built target actionlib_msgs_generate_messages_nodejs [ 0%] Built target geometry_msgs_generate_messages_nodejs [ 0%] Built target actionlib_msgs_generate_messages_lisp [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseResult [ 0%] Built target geometry_msgs_generate_messages_lisp [ 0%] Built target actionlib_msgs_generate_messages_eus [ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesGoal [ 0%] Built target _kinova_msgs_generate_messages_check_deps_Stop [ 0%] Built target geometry_msgs_generate_messages_eus [ 0%] Built target tf2_msgs_generate_messages_lisp [ 0%] Built target roscpp_generate_messages_lisp [ 0%] Built target roscpp_generate_messages_nodejs [ 0%] Built target std_msgs_generate_messages_py [ 0%] Built target roscpp_generate_messages_eus [ 0%] Built target dynamic_reconfigure_generate_messages_eus [ 0%] Built target std_msgs_generate_messages_nodejs [ 0%] Built target std_msgs_generate_messages_eus [ 0%] Built target rosgraph_msgs_generate_messages_py [ 0%] Built target roscpp_generate_messages_py [ 0%] Built target std_msgs_generate_messages_cpp [ 0%] Built target dynamic_reconfigure_generate_messages_py [ 0%] Built target dynamic_reconfigure_generate_messages_cpp [ 0%] Built target rosgraph_msgs_generate_messages_cpp [ 0%] Built target dynamic_reconfigure_generate_messages_nodejs [ 0%] Built target rosgraph_msgs_generate_messages_eus [ 0%] Built target rosgraph_msgs_generate_messages_lisp [ 0%] Built target dynamic_reconfigure_generate_messages_lisp [ 0%] Built target dynamic_reconfigure_gencfg [ 0%] Built target std_msgs_generate_messages_lisp [ 0%] Built target actionlib_generate_messages_py [ 0%] Built target rosgraph_msgs_generate_messages_nodejs [ 0%] Built target roscpp_generate_messages_cpp [ 0%] Built target actionlib_generate_messages_nodejs [ 0%] Built target actionlib_generate_messages_cpp [ 0%] Built target actionlib_generate_messages_eus [ 0%] Built target actionlib_generate_messages_lisp [ 0%] Built target visualization_msgs_generate_messages_py [ 0%] Built target visualization_msgs_generate_messages_nodejs [ 0%] Built target visualization_msgs_generate_messages_lisp [ 0%] Built target visualization_msgs_generate_messages_eus [ 0%] Built target visualization_msgs_generate_messages_cpp [ 0%] Built target sensor_msgs_generate_messages_nodejs [ 0%] Built target sensor_msgs_generate_messages_lisp [ 0%] Built target sensor_msgs_generate_messages_cpp [ 0%] Built target sensor_msgs_generate_messages_eus [ 0%] Built target tf_generate_messages_cpp [ 0%] Built target sensor_msgs_generate_messages_py [ 0%] Built target tf_generate_messages_eus [ 0%] Built target tf2_msgs_generate_messages_py [ 0%] Built target tf_generate_messages_py [ 0%] Built target tf2_msgs_generate_messages_cpp [ 0%] Built target tf_generate_messages_lisp [ 0%] Built target tf2_msgs_generate_messages_eus [ 0%] Built target tf_generate_messages_nodejs [ 0%] Built target kinova_driver_gencfg [ 0%] Built target tf2_msgs_generate_messages_nodejs [ 0%] Built target diagnostic_msgs_generate_messages_lisp [ 0%] Built target _catkin_empty_exported_target [ 0%] Built target bond_generate_messages_cpp [ 0%] Built target nav_msgs_generate_messages_py [ 0%] Built target std_srvs_generate_messages_lisp [ 0%] Built target nodelet_generate_messages_py [ 0%] Built target bond_generate_messages_nodejs [ 0%] Built target diagnostic_msgs_generate_messages_nodejs [ 0%] Built target nodelet_generate_messages_lisp [ 0%] Built target nodelet_generate_messages_nodejs [ 0%] Built target std_srvs_generate_messages_py [ 0%] Built target nav_msgs_generate_messages_eus [ 0%] Built target nav_msgs_generate_messages_cpp [ 0%] Built target nav_msgs_generate_messages_nodejs [ 0%] Built target nav_msgs_generate_messages_lisp [ 0%] Built target std_srvs_generate_messages_cpp [ 0%] Built target bond_generate_messages_eus [ 0%] Built target bond_generate_messages_lisp [ 0%] Built target nodelet_generate_messages_cpp [ 0%] Built target std_srvs_generate_messages_nodejs [ 0%] Built target _realsense2_camera_generate_messages_check_deps_Extrinsics [ 0%] Built target _realsense2_camera_generate_messages_check_deps_Metadata [ 0%] Built target _realsense2_camera_generate_messages_check_deps_DeviceInfo [ 0%] Built target bond_generate_messages_py [ 0%] Built target _realsense2_camera_generate_messages_check_deps_IMUInfo [ 0%] Built target diagnostic_msgs_generate_messages_cpp [ 0%] Built target diagnostic_msgs_generate_messages_eus [ 0%] Built target nodelet_generate_messages_eus [ 0%] Built target diagnostic_msgs_generate_messages_py [ 0%] Built target std_srvs_generate_messages_eus [ 1%] Built target j2n6s300_arm_moveit_ikfast_plugin [ 1%] Built target fake_dynamic_reconfigure_server [ 2%] Built target j2s6s300_arm_moveit_ikfast_plugin [ 3%] Built target j2s7s300_robot_arm_moveit_ikfast_plugin [ 3%] Built target m1n6s300_mico_arm_moveit_ikfast_plugin [ 4%] Built target test_bool_dynamic_reconfigure_server [ 20%] Built target kinova_msgs_generate_messages_py [ 20%] Built target ddynamic_reconfigure_auto_update_test [ 35%] Built target kinova_msgs_generate_messages_nodejs [ 51%] Built target kinova_msgs_generate_messages_cpp [ 66%] Built target kinova_msgs_generate_messages_lisp [ 67%] Built target realsense2_camera_generate_messages_cpp [ 83%] Built target kinova_msgs_generate_messages_eus [ 84%] Built target realsense2_camera_generate_messages_eus [ 85%] Built target realsense2_camera_generate_messages_nodejs [ 87%] Built target realsense2_camera_generate_messages_py [ 89%] Built target realsense2_camera_generate_messages_lisp [ 89%] Built target kinova_msgs_generate_messages [ 90%] Built target gripper_command_action_server [ 92%] Built target kinova_tf_updater [ 92%] Built target realsense2_camera [ 92%] Built target joint_trajectory_action_server [ 92%] Built target realsense2_camera_generate_messages [ 95%] Built target kinova_driver [ 96%] Built target work_scene [ 96%] Built target kinova_interactive_control [ 97%] Built target kinova_arm_driver [ 98%] Built target motion_plan [100%] Built target pick_place [100%] Built target test_accuracy bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
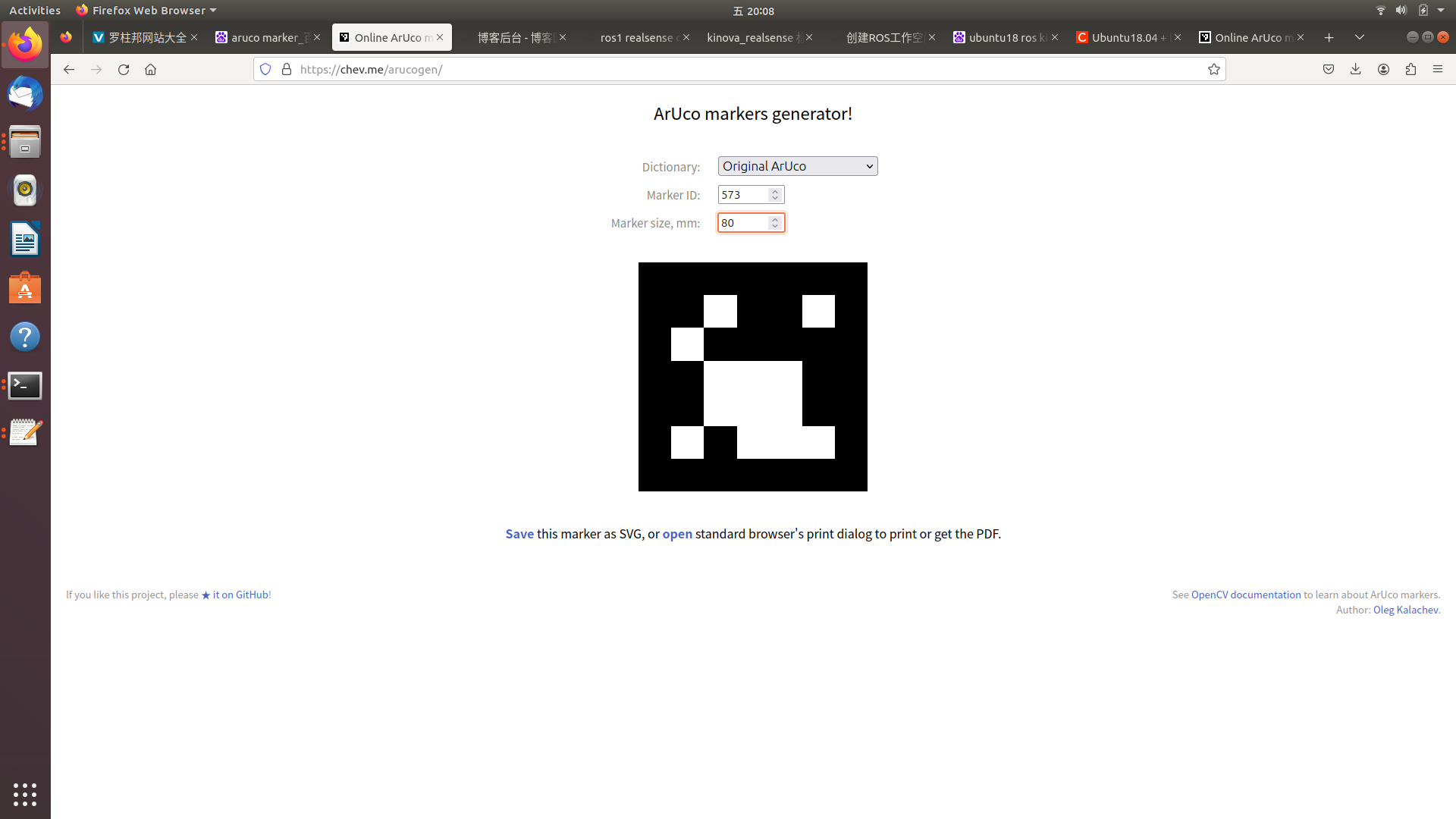
前往 aruco marker 生成网站 打印 marker,我使用的是573,size 80 mm。打印后贴在一块板子上。
https://chev.me/arucogen/
创建kinova_realsense1.launch
bim@bim-Vostro-7570:~/catkin_ws$ cd src
bim@bim-Vostro-7570:~/catkin_ws/src$
bim@bim-Vostro-7570:~/catkin_ws/src$
bim@bim-Vostro-7570:~/catkin_ws/src$
bim@bim-Vostro-7570:~/catkin_ws/src$ ls
aruco_hand_eye-master CMakeLists.txt ddynamic_reconfigure-0.4.1.tar.gz kinova-ros-noetic-devel realsense-ros-2.3.2 vision_visp-rolling.zip
aruco_ros-humble-devel.zip ddynamic_reconfigure-0.4.1 easy_handeye-master.zip kinova-ros-noetic-devel.zip realsense-ros-2.3.2.tar.gz
bim@bim-Vostro-7570:~/catkin_ws/src$
bim@bim-Vostro-7570:~/catkin_ws/src$
bim@bim-Vostro-7570:~/catkin_ws/src$ mkdir launch1
bim@bim-Vostro-7570:~/catkin_ws/src$
bim@bim-Vostro-7570:~/catkin_ws/src$
bim@bim-Vostro-7570:~/catkin_ws/src$
bim@bim-Vostro-7570:~/catkin_ws/src$ cd launch1
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$ touch kinova_realsense1.launch
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$
bim@bim-Vostro-7570:~/catkin_ws/src/launch1$ cd ../../
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
<launch> <!-- The end-effector frame_id, depend on what robot you use --> <arg name="ee_frame" value="/j2s7s300_end_effector"/> <!-- Bring up a realsense --> <include file="$(find realsense2_camera)/launch/rs_rgbd.launch"> </include> <!-- Calibrate the extrinsics for a realsense mounted to a robot base --> <!-- User need to specify markerid and markersize --> <include file="$(find aruco_hand_eye)/launch/aruco_hand_eye.launch"> <arg name="markerid" value="573"/> <arg name="markersize" value="0.080"/> <arg name="publish_tf" value="true"/> <!-- In eye-in-base case, marker_parent_frame is the end-effector frame, camera_parent_frame is the world or base frame --> <arg name="marker_parent_frame" value="/world"/> <arg name="camera_parent_frame" value="/j2s7s300_end_effector"/> <arg name="camera" value="/camera/color/"/> <!-- Here I use the realsense's camera_color_optical_frame because aruco uses rgb image and depth frame is aligned to color frame here --> <arg name="camera_frame" value="/camera_color_optical_frame"/> </include> </launch>
source devel/setup.bash
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ source devel/setup.bash
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=j2s7s300 ... logging to /home/bim/.ros/log/cbea175e-bc45-11ee-a111-e470b83aa6e2/roslaunch-bim-Vostro-7570-25908.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://bim-Vostro-7570:42919/ SUMMARY ======== PARAMETERS * /j2s7s300_driver/connection_type: USB * /j2s7s300_driver/ethernet/local_broadcast_port: 25025 * /j2s7s300_driver/ethernet/local_cmd_port: 25000 * /j2s7s300_driver/ethernet/local_machine_IP: 192.168.100.100 * /j2s7s300_driver/ethernet/subnet_mask: 255.255.255.0 * /j2s7s300_driver/jointSpeedLimitParameter1: 10 * /j2s7s300_driver/jointSpeedLimitParameter2: 20 * /j2s7s300_driver/robot_name: j2s7s300 * /j2s7s300_driver/robot_type: j2s7s300 * /j2s7s300_driver/serial_number: not_set * /j2s7s300_driver/status_interval_seconds: 0.1 * /j2s7s300_driver/torque_parameters/publish_torque_with_gravity_compensation: False * /j2s7s300_driver/torque_parameters/use_estimated_COM_parameters: False * /j2s7s300_driver/use_jaco_v1_fingers: False * /robot_description: <?xml version="1.... * /rosdistro: melodic * /rosversion: 1.14.13 NODES / j2s7s300_driver (kinova_driver/kinova_arm_driver) j2s7s300_state_publisher (robot_state_publisher/robot_state_publisher) auto-starting new master process[master]: started with pid [25925] ROS_MASTER_URI=http://localhost:11311 setting /run_id to cbea175e-bc45-11ee-a111-e470b83aa6e2 process[rosout-1]: started with pid [25938] started core service [/rosout] process[j2s7s300_driver-2]: started with pid [25955] process[j2s7s300_state_publisher-3]: started with pid [25956] [ INFO] [1706271847.682427729]: kinova_robotType is j2s7s300. [ INFO] [1706271847.684093235]: kinova_robotName is j2s7s300. [ INFO] [1706271847.689668757]: Initializing Kinova USB API (header version: 50300, library version: 5.2.0) [ERROR] [1706271847.693770201]: KinovaCommException: Could not initialize Kinova API (return code: 1015) [j2s7s300_driver-2] process has died [pid 25955, exit code -11, cmd /home/bim/catkin_ws/devel/lib/kinova_driver/kinova_arm_driver j2s7s300 __name:=j2s7s300_driver __log:=/home/bim/.ros/log/cbea175e-bc45-11ee-a111-e470b83aa6e2/j2s7s300_driver-2.log]. log file: /home/bim/.ros/log/cbea175e-bc45-11ee-a111-e470b83aa6e2/j2s7s300_driver-2*.log ^C[j2s7s300_state_publisher-3] killing on exit [rosout-1] killing on exit [master] killing on exit shutting down processing monitor... ... shutting down processing monitor complete done bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
A: roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=j2s7s300
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=j2s7s300 ... logging to /home/bim/.ros/log/ac7b8b4e-bcb0-11ee-90dc-e470b83aa6e2/roslaunch-bim-Vostro-7570-4022.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://localhost:37737/ SUMMARY ======== PARAMETERS * /j2s7s300_driver/connection_type: USB * /j2s7s300_driver/ethernet/local_broadcast_port: 25025 * /j2s7s300_driver/ethernet/local_cmd_port: 25000 * /j2s7s300_driver/ethernet/local_machine_IP: 192.168.100.100 * /j2s7s300_driver/ethernet/subnet_mask: 255.255.255.0 * /j2s7s300_driver/jointSpeedLimitParameter1: 10 * /j2s7s300_driver/jointSpeedLimitParameter2: 20 * /j2s7s300_driver/robot_name: j2s7s300 * /j2s7s300_driver/robot_type: j2s7s300 * /j2s7s300_driver/serial_number: not_set * /j2s7s300_driver/status_interval_seconds: 0.1 * /j2s7s300_driver/torque_parameters/publish_torque_with_gravity_compensation: False * /j2s7s300_driver/torque_parameters/use_estimated_COM_parameters: False * /j2s7s300_driver/use_jaco_v1_fingers: False * /robot_description: <?xml version="1.... * /rosdistro: melodic * /rosversion: 1.14.13 NODES / j2s7s300_driver (kinova_driver/kinova_arm_driver) j2s7s300_state_publisher (robot_state_publisher/robot_state_publisher) auto-starting new master process[master]: started with pid [4039] ROS_MASTER_URI=http://localhost:11311 setting /run_id to ac7b8b4e-bcb0-11ee-90dc-e470b83aa6e2 process[rosout-1]: started with pid [4052] started core service [/rosout] process[j2s7s300_driver-2]: started with pid [4069] process[j2s7s300_state_publisher-3]: started with pid [4070] [ INFO] [1706317751.292898165]: kinova_robotType is j2s7s300. [ INFO] [1706317751.295215147]: kinova_robotName is j2s7s300. [ INFO] [1706317751.300667623]: Initializing Kinova USB API (header version: 50300, library version: 5.2.0) [ INFO] [1706317751.467589351]: Found 1 device(s), using device at index 0 (model: Spherical 7DOF Serv, serial number: PJ00900006514125-0 , code version: 393733, code revision: 6) [ INFO] [1706317751.541492909]: Initializing fingers...this will take a few seconds and the fingers should open completely [ INFO] [1706317753.398336756]: The arm is ready to use. j2s7s300_joint_1 j2s7s300_joint_2 j2s7s300_joint_3 j2s7s300_joint_4 j2s7s300_joint_5 j2s7s300_joint_6 j2s7s300_joint_7 [DEBUG] [1706317753.486434934]: Trying to publish message of type [control_msgs/FollowJointTrajectoryFeedback/10817c60c2486ef6b33e97dcd87f4474] on a publisher with type [control_msgs/FollowJointTrajectoryFeedback/10817c60c2486ef6b33e97dcd87f4474] [DEBUG] [1706317753.511554607]: Trying to publish message of type [kinova_msgs/JointAngles/bf16c4e5154848a0767d1aaab0a4796b] on a publisher with type [kinova_msgs/JointAngles/bf16c4e5154848a0767d1aaab0a4796b] [DEBUG] [1706317753.511745527]: Trying to publish message of type [sensor_msgs/JointState/3066dcd76a6cfaef579bd0f34173e9fd] on a publisher with type [sensor_msgs/JointState/3066dcd76a6cfaef579bd0f34173e9fd] [DEBUG] [1706317753.515647181]: Trying to publish message of type [geometry_msgs/PoseStamped/d3812c3cbc69362b77dc0b19b345f8f5] on a publisher with type [geometry_msgs/PoseStamped/d3812c3cbc69362b77dc0b19b345f8f5] [DEBUG] [1706317753.515836392]: Trying to publish message of type [kinova_msgs/KinovaPose/e831d993faea563f6fe69d7db9b384c9] on a publisher with type [kinova_msgs/KinovaPose/e831d993faea563f6fe69d7db9b384c9] [DEBUG] [1706317753.518579469]: Trying to publish message of type [geometry_msgs/WrenchStamped/d78d3cb249ce23087ade7e7d0c40cfa7] on a publisher with type [geometry_msgs/WrenchStamped/d78d3cb249ce23087ade7e7d0c40cfa7] [DEBUG] [1706317753.520577784]: Trying to publish message of type [kinova_msgs/FingerPosition/f56891e5dcd1900989f764a9b845c8e5] on a publisher with type [kinova_msgs/FingerPosition/f56891e5dcd1900989f764a9b845c8e5] [DEBUG] [1706317753.620648694]: Trying to publish message of type [actionlib_msgs/GoalStatusArray/8b2b82f13216d0a8ea88bd3af735e619] on a publisher with type [actionlib_msgs/GoalStatusArray/8b2b82f13216d0a8ea88bd3af735e619]
B: roslaunch src/aruco_hand_eye-master/launch/kinova_realsense1.launch
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ roslaunch src/aruco_hand_eye-master/launch/kinova_realsense1.launch
... logging to /home/bim/.ros/log/12197a94-bc46-11ee-a111-e470b83aa6e2/roslaunch-bim-Vostro-7570-13825.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://localhost:36995/
SUMMARY
========
PARAMETERS
* /camera/color/aruco_tracker/camera_frame: /camera_color_opt...
* /camera/color/aruco_tracker/image_is_rectified: True
* /camera/color/aruco_tracker/marker_frame: /hand_eye//camera...
* /camera/color/aruco_tracker/marker_id: 573
* /camera/color/aruco_tracker/marker_size: 0.08
* /camera/color/aruco_tracker/reference_frame: /camera_color_opt...
* /camera/color/hand_eye_connector/camera_parent_frame: /j2s7s300_end_eff...
* /camera/color/hand_eye_connector/interactive: True
* /camera/color/hand_eye_connector/marker_parent_frame: /world
* /camera/color/hand_eye_connector/publish_tf: True
* /camera/color/hand_eye_connector/rpy_optical_base: [0.0, 0.0, 0.0]
* /camera/color/hand_eye_connector/sample_rate: 2
* /camera/color/hand_eye_connector/tf_suffix:
* /camera/color/hand_eye_connector/xyz_optical_base: [0.0, 0.0, 0.0]
* /camera/realsense2_camera/accel_fps: -1
* /camera/realsense2_camera/accel_frame_id: camera_accel_frame
* /camera/realsense2_camera/accel_optical_frame_id: camera_accel_opti...
* /camera/realsense2_camera/align_depth: True
* /camera/realsense2_camera/aligned_depth_to_color_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye1_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye2_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_infra1_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_infra2_frame_id: camera_aligned_de...
* /camera/realsense2_camera/allow_no_texture_points: False
* /camera/realsense2_camera/base_frame_id: camera_link
* /camera/realsense2_camera/calib_odom_file:
* /camera/realsense2_camera/clip_distance: -1.0
* /camera/realsense2_camera/color_fps: -1
* /camera/realsense2_camera/color_frame_id: camera_color_frame
* /camera/realsense2_camera/color_height: -1
* /camera/realsense2_camera/color_optical_frame_id: camera_color_opti...
* /camera/realsense2_camera/color_width: -1
* /camera/realsense2_camera/confidence_fps: 30
* /camera/realsense2_camera/confidence_height: 480
* /camera/realsense2_camera/confidence_width: 640
* /camera/realsense2_camera/depth_fps: -1
* /camera/realsense2_camera/depth_frame_id: camera_depth_frame
* /camera/realsense2_camera/depth_height: -1
* /camera/realsense2_camera/depth_optical_frame_id: camera_depth_opti...
* /camera/realsense2_camera/depth_width: -1
* /camera/realsense2_camera/device_type:
* /camera/realsense2_camera/enable_accel: False
* /camera/realsense2_camera/enable_color: True
* /camera/realsense2_camera/enable_confidence: True
* /camera/realsense2_camera/enable_depth: True
* /camera/realsense2_camera/enable_fisheye1: False
* /camera/realsense2_camera/enable_fisheye2: False
* /camera/realsense2_camera/enable_fisheye: False
* /camera/realsense2_camera/enable_gyro: False
* /camera/realsense2_camera/enable_infra1: False
* /camera/realsense2_camera/enable_infra2: False
* /camera/realsense2_camera/enable_infra: False
* /camera/realsense2_camera/enable_pointcloud: False
* /camera/realsense2_camera/enable_pose: False
* /camera/realsense2_camera/enable_sync: True
* /camera/realsense2_camera/filters:
* /camera/realsense2_camera/fisheye1_frame_id: camera_fisheye1_f...
* /camera/realsense2_camera/fisheye1_optical_frame_id: camera_fisheye1_o...
* /camera/realsense2_camera/fisheye2_frame_id: camera_fisheye2_f...
* /camera/realsense2_camera/fisheye2_optical_frame_id: camera_fisheye2_o...
* /camera/realsense2_camera/fisheye_fps: -1
* /camera/realsense2_camera/fisheye_frame_id: camera_fisheye_frame
* /camera/realsense2_camera/fisheye_height: -1
* /camera/realsense2_camera/fisheye_optical_frame_id: camera_fisheye_op...
* /camera/realsense2_camera/fisheye_width: -1
* /camera/realsense2_camera/gyro_fps: -1
* /camera/realsense2_camera/gyro_frame_id: camera_gyro_frame
* /camera/realsense2_camera/gyro_optical_frame_id: camera_gyro_optic...
* /camera/realsense2_camera/imu_optical_frame_id: camera_imu_optica...
* /camera/realsense2_camera/infra1_frame_id: camera_infra1_frame
* /camera/realsense2_camera/infra1_optical_frame_id: camera_infra1_opt...
* /camera/realsense2_camera/infra2_frame_id: camera_infra2_frame
* /camera/realsense2_camera/infra2_optical_frame_id: camera_infra2_opt...
* /camera/realsense2_camera/infra_fps: -1
* /camera/realsense2_camera/infra_height: -1
* /camera/realsense2_camera/infra_rgb: False
* /camera/realsense2_camera/infra_width: -1
* /camera/realsense2_camera/initial_reset: False
* /camera/realsense2_camera/json_file_path:
* /camera/realsense2_camera/linear_accel_cov: 0.01
* /camera/realsense2_camera/odom_frame_id: camera_odom_frame
* /camera/realsense2_camera/ordered_pc: False
* /camera/realsense2_camera/pointcloud_texture_index: 0
* /camera/realsense2_camera/pointcloud_texture_stream: RS2_STREAM_COLOR
* /camera/realsense2_camera/pose_frame_id: camera_pose_frame
* /camera/realsense2_camera/pose_optical_frame_id: camera_pose_optic...
* /camera/realsense2_camera/publish_odom_tf: True
* /camera/realsense2_camera/publish_tf: True
* /camera/realsense2_camera/reconnect_timeout: 6.0
* /camera/realsense2_camera/rosbag_filename:
* /camera/realsense2_camera/serial_no:
* /camera/realsense2_camera/stereo_module/exposure/1: 7500
* /camera/realsense2_camera/stereo_module/exposure/2: 1
* /camera/realsense2_camera/stereo_module/gain/1: 16
* /camera/realsense2_camera/stereo_module/gain/2: 16
* /camera/realsense2_camera/tf_publish_rate: 0.0
* /camera/realsense2_camera/topic_odom_in: camera/odom_in
* /camera/realsense2_camera/unite_imu_method: none
* /camera/realsense2_camera/usb_port_id:
* /camera/realsense2_camera/wait_for_device_timeout: -1.0
* /rosdistro: melodic
* /rosversion: 1.14.13
NODES
/camera/
color_rectify_color (nodelet/nodelet)
points_xyzrgb_hw_registered (nodelet/nodelet)
realsense2_camera (nodelet/nodelet)
realsense2_camera_manager (nodelet/nodelet)
/camera/color/
aruco_tracker (aruco_ros/single)
hand_eye_connector (aruco_hand_eye/calibrate.py)
hand_eye_solver (visp_hand2eye_calibration/visp_hand2eye_calibration_calibrator)
ROS_MASTER_URI=http://localhost:11311
process[camera/realsense2_camera_manager-1]: started with pid [13872]
process[camera/realsense2_camera-2]: started with pid [13873]
process[camera/color_rectify_color-3]: started with pid [13874]
process[camera/points_xyzrgb_hw_registered-4]: started with pid [13881]
process[camera/color/aruco_tracker-5]: started with pid [13890]
process[camera/color/hand_eye_solver-6]: started with pid [13908]
process[camera/color/hand_eye_connector-7]: started with pid [13921]
[ INFO] [1706272834.046928085]: Initializing nodelet with 8 worker threads.
[ WARN] [1706272834.206984569]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706272834.209928048]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706272834.300016135]: normalizeImageIllumination is unimplemented!
[ INFO] [1706272834.508540729]: RealSense ROS v2.3.2
[ INFO] [1706272834.508614748]: Built with LibRealSense v2.50.0
[ INFO] [1706272834.508647780]: Running with LibRealSense v2.50.0
[ INFO] [1706272834.534760725]:
[ INFO] [1706272834.542349878]: Device with serial number 943222071573 was found.
[ INFO] [1706272834.542429890]: Device with physical ID /sys/devices/pci0000:00/0000:00:14.0/usb2/2-1/2-1:1.0/video4linux/video0 was found.
[ INFO] [1706272834.542486094]: Device with name Intel RealSense D435I was found.
[ INFO] [1706272834.544711138]: Device with port number 2-1 was found.
[ INFO] [1706272834.544770448]: Device USB type: 3.2
[ INFO] [1706272834.550353871]: getParameters...
[ INFO] [1706272834.633511683]: setupDevice...
[ INFO] [1706272834.633566837]: JSON file is not provided
[ INFO] [1706272834.633593539]: ROS Node Namespace: camera
[ INFO] [1706272834.633644814]: Device Name: Intel RealSense D435I
[ INFO] [1706272834.633668706]: Device Serial No: 943222071573
[ INFO] [1706272834.633696502]: Device physical port: /sys/devices/pci0000:00/0000:00:14.0/usb2/2-1/2-1:1.0/video4linux/video0
[ INFO] [1706272834.633723289]: Device FW version: 05.15.01.00
[ INFO] [1706272834.633751929]: Device Product ID: 0x0B3A
[ INFO] [1706272834.633778831]: Enable PointCloud: Off
[ INFO] [1706272834.633806012]: Align Depth: On
[ INFO] [1706272834.633835783]: Sync Mode: On
[ INFO] [1706272834.633944037]: Device Sensors:
[ INFO] [1706272834.639518704]: Stereo Module was found.
26/01 20:40:34,640 WARNING [140101264267008] (backend-v4l2.cpp:1387) Pixel format 36315752-1a66-a242-9065-d01814a likely requires patch for fourcc code RW16!
[ INFO] [1706272834.652616072]: RGB Camera was found.
[ INFO] [1706272834.652976812]: Motion Module was found.
[ INFO] [1706272834.653080740]: (Confidence, 0) sensor isn't supported by current device! -- Skipping...
[ INFO] [1706272834.653626254]: num_filters: 1
[ INFO] [1706272834.653666307]: Setting Dynamic reconfig parameters.
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
[ WARN] [1706272834.704836063]: Param '/camera/rgb_camera/power_line_frequency' has value 3 that is not in the enum { {50Hz: 1} {60Hz: 2} {Disabled: 0} }. Removing this parameter from dynamic reconfigure options.
[ INFO] [1706272834.718048845]: Done Setting Dynamic reconfig parameters.
[ INFO] [1706272834.718784467]: depth stream is enabled - width: 848, height: 480, fps: 30, Format: Z16
[ INFO] [1706272834.720170155]: color stream is enabled - width: 1280, height: 720, fps: 30, Format: RGB8
[ INFO] [1706272834.721557138]: setupPublishers...
[ INFO] [1706272834.725830123]: Expected frequency for depth = 30.00000
[ INFO] [1706272834.756308281]: Expected frequency for color = 30.00000
[ INFO] [1706272834.785418456]: Expected frequency for aligned_depth_to_color = 30.00000
[ INFO] [1706272834.814393313]: setupStreams...
[ INFO] [1706272834.828696870]: SELECTED BASE:Depth, 0
[ INFO] [1706272834.843935833]: RealSense Node Is Up!
26/01 20:40:34,949 WARNING [140100818167552] (ds5-timestamp.cpp:69) UVC metadata payloads not available. Please refer to the installation chapter for details.
[ WARN] [1706272834.953880161]: Frame metadata isn't available! (frame_timestamp_domain = RS2_TIMESTAMP_DOMAIN_SYSTEM_TIME)
26/01 20:40:35,277 WARNING [140100826560256] (ds5-timestamp.cpp:69) UVC metadata payloads not available. Please refer to the installation chapter for details.
^C[camera/color/hand_eye_connector-7] killing on exit
[camera/color/hand_eye_solver-6] killing on exit
[camera/color/aruco_tracker-5] killing on exit
[camera/points_xyzrgb_hw_registered-4] killing on exit
[camera/color_rectify_color-3] killing on exit
[camera/realsense2_camera-2] killing on exit
[camera/realsense2_camera_manager-1] killing on exit
shutting down processing monitor...
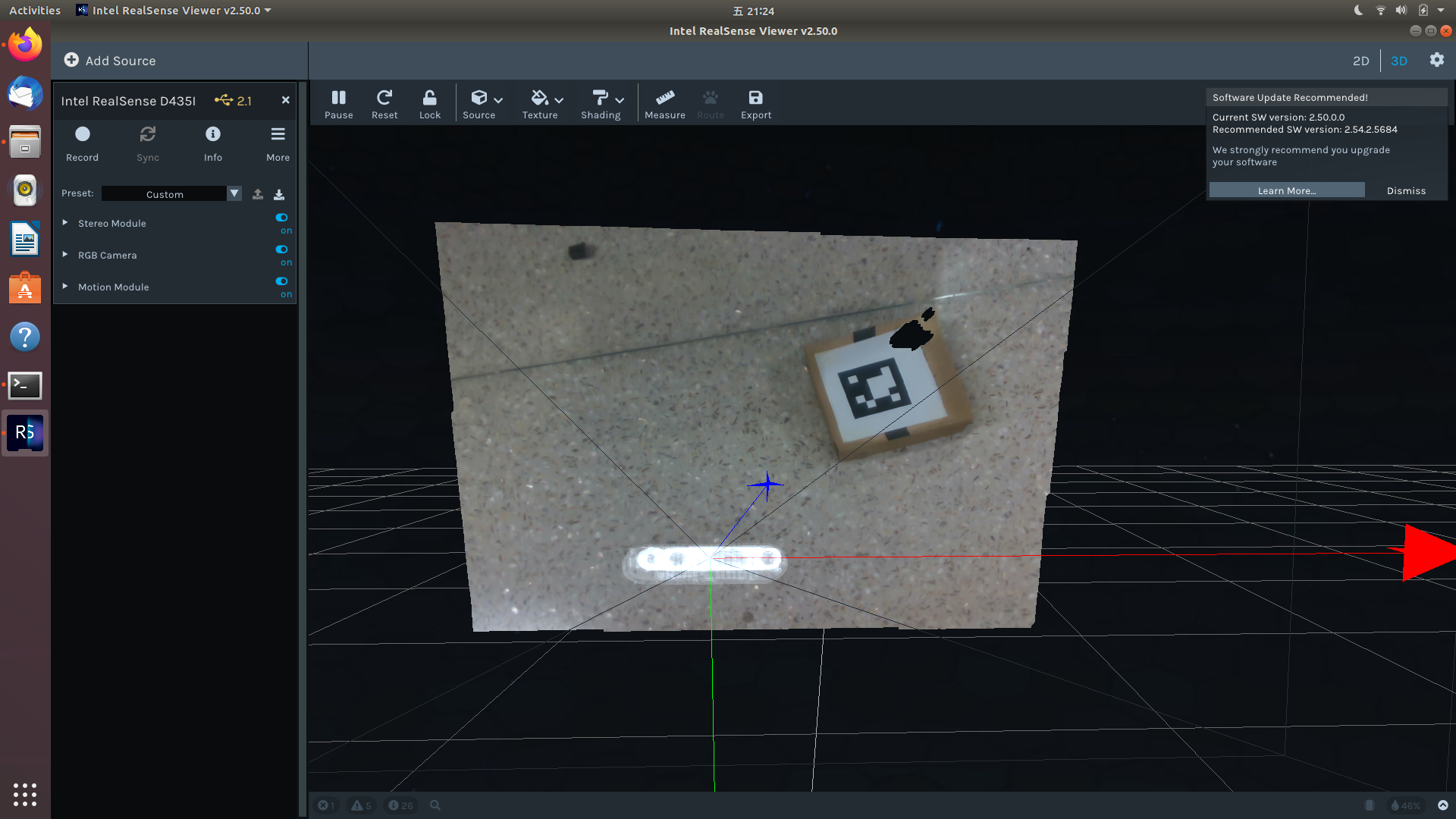
realsense-viewer
roslaunch src/aruco_hand_eye-master/launch/kinova_realsense1.launch
按下enter接受这张图片作为标定样例,按下d删除这张图。
此时,利用遥控器移动kinova到另一个姿态,保证最终相机视野里出现mark板。然后再按下enter开始进一步标定计算。
经过15~20次左右的标定,结果已经趋于稳定:
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ roslaunch src/aruco_hand_eye-master/launch/kinova_realsense1.launch
... logging to /home/bim/.ros/log/e7d60866-bc4e-11ee-98fb-e470b83aa6e2/roslaunch-bim-Vostro-7570-10747.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://localhost:43685/
SUMMARY
========
PARAMETERS
* /camera/color/aruco_tracker/camera_frame: /camera_color_opt...
* /camera/color/aruco_tracker/image_is_rectified: True
* /camera/color/aruco_tracker/marker_frame: /hand_eye//camera...
* /camera/color/aruco_tracker/marker_id: 573
* /camera/color/aruco_tracker/marker_size: 0.08
* /camera/color/aruco_tracker/reference_frame: /camera_color_opt...
* /camera/color/hand_eye_connector/camera_parent_frame: /j2s7s300_end_eff...
* /camera/color/hand_eye_connector/interactive: True
* /camera/color/hand_eye_connector/marker_parent_frame: /world
* /camera/color/hand_eye_connector/publish_tf: True
* /camera/color/hand_eye_connector/rpy_optical_base: [0.0, 0.0, 0.0]
* /camera/color/hand_eye_connector/sample_rate: 2
* /camera/color/hand_eye_connector/tf_suffix:
* /camera/color/hand_eye_connector/xyz_optical_base: [0.0, 0.0, 0.0]
* /camera/realsense2_camera/accel_fps: -1
* /camera/realsense2_camera/accel_frame_id: camera_accel_frame
* /camera/realsense2_camera/accel_optical_frame_id: camera_accel_opti...
* /camera/realsense2_camera/align_depth: True
* /camera/realsense2_camera/aligned_depth_to_color_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye1_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye2_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_infra1_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_infra2_frame_id: camera_aligned_de...
* /camera/realsense2_camera/allow_no_texture_points: False
* /camera/realsense2_camera/base_frame_id: camera_link
* /camera/realsense2_camera/calib_odom_file:
* /camera/realsense2_camera/clip_distance: -1.0
* /camera/realsense2_camera/color_fps: -1
* /camera/realsense2_camera/color_frame_id: camera_color_frame
* /camera/realsense2_camera/color_height: -1
* /camera/realsense2_camera/color_optical_frame_id: camera_color_opti...
* /camera/realsense2_camera/color_width: -1
* /camera/realsense2_camera/confidence_fps: 30
* /camera/realsense2_camera/confidence_height: 480
* /camera/realsense2_camera/confidence_width: 640
* /camera/realsense2_camera/depth_fps: -1
* /camera/realsense2_camera/depth_frame_id: camera_depth_frame
* /camera/realsense2_camera/depth_height: -1
* /camera/realsense2_camera/depth_optical_frame_id: camera_depth_opti...
* /camera/realsense2_camera/depth_width: -1
* /camera/realsense2_camera/device_type:
* /camera/realsense2_camera/enable_accel: False
* /camera/realsense2_camera/enable_color: True
* /camera/realsense2_camera/enable_confidence: True
* /camera/realsense2_camera/enable_depth: True
* /camera/realsense2_camera/enable_fisheye1: False
* /camera/realsense2_camera/enable_fisheye2: False
* /camera/realsense2_camera/enable_fisheye: False
* /camera/realsense2_camera/enable_gyro: False
* /camera/realsense2_camera/enable_infra1: False
* /camera/realsense2_camera/enable_infra2: False
* /camera/realsense2_camera/enable_infra: False
* /camera/realsense2_camera/enable_pointcloud: False
* /camera/realsense2_camera/enable_pose: False
* /camera/realsense2_camera/enable_sync: True
* /camera/realsense2_camera/filters:
* /camera/realsense2_camera/fisheye1_frame_id: camera_fisheye1_f...
* /camera/realsense2_camera/fisheye1_optical_frame_id: camera_fisheye1_o...
* /camera/realsense2_camera/fisheye2_frame_id: camera_fisheye2_f...
* /camera/realsense2_camera/fisheye2_optical_frame_id: camera_fisheye2_o...
* /camera/realsense2_camera/fisheye_fps: -1
* /camera/realsense2_camera/fisheye_frame_id: camera_fisheye_frame
* /camera/realsense2_camera/fisheye_height: -1
* /camera/realsense2_camera/fisheye_optical_frame_id: camera_fisheye_op...
* /camera/realsense2_camera/fisheye_width: -1
* /camera/realsense2_camera/gyro_fps: -1
* /camera/realsense2_camera/gyro_frame_id: camera_gyro_frame
* /camera/realsense2_camera/gyro_optical_frame_id: camera_gyro_optic...
* /camera/realsense2_camera/imu_optical_frame_id: camera_imu_optica...
* /camera/realsense2_camera/infra1_frame_id: camera_infra1_frame
* /camera/realsense2_camera/infra1_optical_frame_id: camera_infra1_opt...
* /camera/realsense2_camera/infra2_frame_id: camera_infra2_frame
* /camera/realsense2_camera/infra2_optical_frame_id: camera_infra2_opt...
* /camera/realsense2_camera/infra_fps: -1
* /camera/realsense2_camera/infra_height: -1
* /camera/realsense2_camera/infra_rgb: False
* /camera/realsense2_camera/infra_width: -1
* /camera/realsense2_camera/initial_reset: False
* /camera/realsense2_camera/json_file_path:
* /camera/realsense2_camera/linear_accel_cov: 0.01
* /camera/realsense2_camera/odom_frame_id: camera_odom_frame
* /camera/realsense2_camera/ordered_pc: False
* /camera/realsense2_camera/pointcloud_texture_index: 0
* /camera/realsense2_camera/pointcloud_texture_stream: RS2_STREAM_COLOR
* /camera/realsense2_camera/pose_frame_id: camera_pose_frame
* /camera/realsense2_camera/pose_optical_frame_id: camera_pose_optic...
* /camera/realsense2_camera/publish_odom_tf: True
* /camera/realsense2_camera/publish_tf: True
* /camera/realsense2_camera/reconnect_timeout: 6.0
* /camera/realsense2_camera/rosbag_filename:
* /camera/realsense2_camera/serial_no:
* /camera/realsense2_camera/stereo_module/exposure/1: 7500
* /camera/realsense2_camera/stereo_module/exposure/2: 1
* /camera/realsense2_camera/stereo_module/gain/1: 16
* /camera/realsense2_camera/stereo_module/gain/2: 16
* /camera/realsense2_camera/tf_publish_rate: 0.0
* /camera/realsense2_camera/topic_odom_in: camera/odom_in
* /camera/realsense2_camera/unite_imu_method: none
* /camera/realsense2_camera/usb_port_id:
* /camera/realsense2_camera/wait_for_device_timeout: -1.0
* /rosdistro: melodic
* /rosversion: 1.14.13
NODES
/camera/
color_rectify_color (nodelet/nodelet)
points_xyzrgb_hw_registered (nodelet/nodelet)
realsense2_camera (nodelet/nodelet)
realsense2_camera_manager (nodelet/nodelet)
/camera/color/
aruco_tracker (aruco_ros/single)
hand_eye_connector (aruco_hand_eye/calibrate.py)
hand_eye_solver (visp_hand2eye_calibration/visp_hand2eye_calibration_calibrator)
ROS_MASTER_URI=http://localhost:11311
process[camera/realsense2_camera_manager-1]: started with pid [10794]
process[camera/realsense2_camera-2]: started with pid [10795]
process[camera/color_rectify_color-3]: started with pid [10796]
process[camera/points_xyzrgb_hw_registered-4]: started with pid [10802]
process[camera/color/aruco_tracker-5]: started with pid [10811]
process[camera/color/hand_eye_solver-6]: started with pid [10825]
process[camera/color/hand_eye_connector-7]: started with pid [10841]
[ INFO] [1706275948.932386411]: Initializing nodelet with 8 worker threads.
[ WARN] [1706275949.075229371]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706275949.077837295]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706275949.173248077]: normalizeImageIllumination is unimplemented!
[ INFO] [1706275949.393493986]: RealSense ROS v2.3.2
[ INFO] [1706275949.393568484]: Built with LibRealSense v2.50.0
[ INFO] [1706275949.393649156]: Running with LibRealSense v2.50.0
[ INFO] [1706275949.418516246]:
[ INFO] [1706275949.426585870]: Device with serial number 943222071573 was found.
[ INFO] [1706275949.426651760]: Device with physical ID /sys/devices/pci0000:00/0000:00:14.0/usb1/1-1/1-1:1.0/video4linux/video1 was found.
[ INFO] [1706275949.426701349]: Device with name Intel RealSense D435I was found.
[ INFO] [1706275949.427609011]: Device with port number 1-1 was found.
[ INFO] [1706275949.427690071]: Device USB type: 2.1
[ WARN] [1706275949.427746553]: Device 943222071573 is connected using a 2.1 port. Reduced performance is expected.
[ INFO] [1706275949.429894834]: getParameters...
[ INFO] [1706275949.516307152]: setupDevice...
[ INFO] [1706275949.516363940]: JSON file is not provided
[ INFO] [1706275949.516388487]: ROS Node Namespace: camera
[ INFO] [1706275949.516416753]: Device Name: Intel RealSense D435I
[ INFO] [1706275949.516449303]: Device Serial No: 943222071573
[ INFO] [1706275949.516482828]: Device physical port: /sys/devices/pci0000:00/0000:00:14.0/usb1/1-1/1-1:1.0/video4linux/video1
[ INFO] [1706275949.516514050]: Device FW version: 05.15.01.00
[ INFO] [1706275949.516543263]: Device Product ID: 0x0B3A
[ INFO] [1706275949.516572360]: Enable PointCloud: Off
[ INFO] [1706275949.516601469]: Align Depth: On
[ INFO] [1706275949.516629251]: Sync Mode: On
[ INFO] [1706275949.516745253]: Device Sensors:
[ INFO] [1706275949.518450311]: Stereo Module was found.
[ INFO] [1706275949.520491041]: RGB Camera was found.
[ INFO] [1706275949.520673424]: Motion Module was found.
[ INFO] [1706275949.520774302]: (Confidence, 0) sensor isn't supported by current device! -- Skipping...
[ INFO] [1706275949.521267477]: num_filters: 1
[ INFO] [1706275949.521321036]: Setting Dynamic reconfig parameters.
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
[ WARN] [1706275949.578517062]: Param '/camera/rgb_camera/power_line_frequency' has value 3 that is not in the enum { {50Hz: 1} {60Hz: 2} {Disabled: 0} }. Removing this parameter from dynamic reconfigure options.
[ INFO] [1706275949.591550171]: Done Setting Dynamic reconfig parameters.
[ INFO] [1706275949.592082734]: depth stream is enabled - width: 640, height: 480, fps: 15, Format: Z16
[ INFO] [1706275949.592585678]: color stream is enabled - width: 640, height: 480, fps: 15, Format: RGB8
[ INFO] [1706275949.593629426]: setupPublishers...
[ INFO] [1706275949.597252200]: Expected frequency for depth = 15.00000
[ INFO] [1706275949.626271656]: Expected frequency for color = 15.00000
[ INFO] [1706275949.654249065]: Expected frequency for aligned_depth_to_color = 15.00000
[ INFO] [1706275949.685370378]: setupStreams...
[ INFO] [1706275949.743375075]: SELECTED BASE:Depth, 0
[ INFO] [1706275949.799787477]: RealSense Node Is Up!
26/01 21:32:29,930 WARNING [139986062010112] (ds5-timestamp.cpp:69) UVC metadata payloads not available. Please refer to the installation chapter for details.
[ WARN] [1706275949.933885671]: Frame metadata isn't available! (frame_timestamp_domain = RS2_TIMESTAMP_DOMAIN_SYSTEM_TIME)
26/01 21:32:30,238 WARNING [139986070402816] (ds5-timestamp.cpp:69) UVC metadata payloads not available. Please refer to the installation chapter for details.
[INFO] [1706275950.413428]: Received marker sample.
[WARN] [1706275950.417447]: 1 more samples needed...
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706275950.592579992]: Hardware Notification:Left MIPI error,1.70628e+12,Error,Hardware Error
Hit [enter] to capture the next sample...
[INFO] [1706275979.389873]: Received marker sample.
[INFO] [1706275979.394146]: Computing from 2 poses...
[INFO] [1706275979.410251]: Result:
effector_camera:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
[INFO] [1706275979.414127]: Base xyz: ( 0.000000 0.000000 0.000000 ) rpy: ( 0.000000 -0.000000 0.000000 ) xyzw: ( 0.000000 0.000000 0.000000 1.000000 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706276009.079555349]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276009.079643346]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276023.403286]: Received marker sample.
[WARN] [1706276023.506860]: Lookup would require extrapolation into the past. Requested time 1706276008.417212486 but the earliest data is at time 1706276013.459476233, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276023.514149]: Received marker sample.
[INFO] [1706276023.520320]: Computing from 3 poses...
[INFO] [1706276023.534767]: Result:
effector_camera:
translation:
x: 1.10524835639
y: 2.42899348149
z: -1.93650758146
rotation:
x: -0.00428869284607
y: -0.00645050525398
z: 0.982982412789
w: 0.183536302249
[INFO] [1706276023.536913]: Base xyz: ( 1.105248 2.428993 -1.936508 ) rpy: ( -0.014256 0.006064 2.772373 ) xyzw: ( -0.004289 -0.006451 0.982982 0.183536 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706276069.081599274]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276069.081715153]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample... 26/01 21:35:26,373 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 21:35:27,376 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 21:35:28,379 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
[ WARN] [1706276129.079698752]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276129.079766790]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276132.244158]: Received marker sample.
[WARN] [1706276132.349899]: Lookup would require extrapolation into the past. Requested time 1706276052.518661261 but the earliest data is at time 1706276122.259287596, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276132.355375]: Received marker sample.
[WARN] [1706276132.460300]: Lookup would require extrapolation into the past. Requested time 1706276072.134019613 but the earliest data is at time 1706276122.359232903, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276132.468666]: Received marker sample.
[WARN] [1706276132.575144]: Lookup would require extrapolation into the past. Requested time 1706276101.289832830 but the earliest data is at time 1706276122.559258461, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276132.583384]: Received marker sample.
[INFO] [1706276132.589642]: Computing from 4 poses...
[INFO] [1706276132.616134]: Result:
effector_camera:
translation:
x: -0.696336707788
y: 1.37952427509
z: -0.800814422374
rotation:
x: 0.0494565121907
y: -0.0633545150551
z: 0.958910613713
w: 0.272085820527
[INFO] [1706276132.620476]: Base xyz: ( -0.696337 1.379524 -0.800814 ) rpy: ( -0.095536 -0.129688 2.594845 ) xyzw: ( 0.049457 -0.063355 0.958911 0.272086 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276147.642543]: Received marker sample.
[INFO] [1706276147.696913]: Computing from 5 poses...
[INFO] [1706276147.719073]: Result:
effector_camera:
translation:
x: -0.601273075701
y: 0.616465992523
z: -0.440309706233
rotation:
x: 0.0645183094115
y: 0.012496467661
z: -0.980572471016
w: 0.18482114363
[INFO] [1706276147.722377]: Base xyz: ( -0.601273 0.616466 -0.440310 ) rpy: ( -0.000664 0.131528 -2.769042 ) xyzw: ( -0.064518 -0.012496 0.980572 -0.184821 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276167.290211]: Received marker sample.
[INFO] [1706276167.296800]: Computing from 6 poses...
[INFO] [1706276167.340807]: Result:
effector_camera:
translation:
x: -0.636376772566
y: 0.919151532936
z: -0.526909084468
rotation:
x: 0.0229473327468
y: -0.0553831378604
z: 0.99269269866
w: 0.104725039922
[INFO] [1706276167.343737]: Base xyz: ( -0.636377 0.919152 -0.526909 ) rpy: ( -0.105518 -0.057190 2.934399 ) xyzw: ( 0.022947 -0.055383 0.992693 0.104725 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706276189.081390549]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276189.081510456]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...
[INFO] [1706276221.588530]: Received marker sample.
[WARN] [1706276221.694769]: Lookup would require extrapolation into the past. Requested time 1706276196.287707090 but the earliest data is at time 1706276211.659488440, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276221.698419]: Received marker sample.
[INFO] [1706276221.701179]: Computing from 7 poses...
[INFO] [1706276221.735411]: Result:
effector_camera:
translation:
x: 0.0510522103593
y: 0.0424275382124
z: -0.102441690619
rotation:
x: 0.0317549501713
y: 0.0200719768805
z: -0.994586593275
w: 0.096882647369
[INFO] [1706276221.737341]: Base xyz: ( 0.051052 0.042428 -0.102442 ) rpy: ( -0.033856 0.067106 -2.948522 ) xyzw: ( -0.031755 -0.020072 0.994587 -0.096883 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276247.098945]: Received marker sample.
[INFO] [1706276247.103323]: Computing from 8 poses...
[INFO] [1706276247.138329]: Result:
effector_camera:
translation:
x: 0.0252226192302
y: 0.036119324581
z: -0.0746248865171
rotation:
x: 0.0269847451054
y: 0.0164208114492
z: -0.997112361617
w: 0.0690588067738
[INFO] [1706276247.140394]: Base xyz: ( 0.025223 0.036119 -0.074625 ) rpy: ( -0.029070 0.056111 -3.004112 ) xyzw: ( -0.026985 -0.016421 0.997112 -0.069059 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706276249.081069779]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276249.081163723]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...
[INFO] [1706276287.768799]: Received marker sample.
[WARN] [1706276287.870802]: Lookup would require extrapolation into the past. Requested time 1706276276.140903234 but the earliest data is at time 1706276277.958954573, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276287.874392]: Received marker sample.
[INFO] [1706276287.877262]: Computing from 9 poses...
[INFO] [1706276287.911805]: Result:
effector_camera:
translation:
x: 0.0767224175346
y: 0.0522265790528
z: -0.181411577764
rotation:
x: 0.0316060320106
y: 0.0151230434278
z: -0.997849864567
w: 0.0553895304412
[INFO] [1706276287.914435]: Base xyz: ( 0.076722 0.052227 -0.181412 ) rpy: ( -0.026739 0.064797 -3.031555 ) xyzw: ( -0.031606 -0.015123 0.997850 -0.055390 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706276309.081735313]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276309.081855938]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...[ WARN] [1706276369.078190922]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276369.078258730]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706276429.079443338]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276429.079552130]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706276489.077164609]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276489.077222328]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276510.210654]: Received marker sample.
[WARN] [1706276510.314230]: Lookup would require extrapolation into the past. Requested time 1706276316.902344942 but the earliest data is at time 1706276500.359322309, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276510.322889]: Received marker sample.
[WARN] [1706276510.428276]: Lookup would require extrapolation into the past. Requested time 1706276346.055387020 but the earliest data is at time 1706276500.459389210, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276510.432441]: Received marker sample.
[WARN] [1706276510.535719]: Lookup would require extrapolation into the past. Requested time 1706276375.210242987 but the earliest data is at time 1706276500.559367418, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276510.540294]: Received marker sample.
[WARN] [1706276510.643579]: Lookup would require extrapolation into the past. Requested time 1706276404.364831686 but the earliest data is at time 1706276500.659313440, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276510.652364]: Received marker sample.
[WARN] [1706276510.758412]: Lookup would require extrapolation into the past. Requested time 1706276433.519001722 but the earliest data is at time 1706276500.759435177, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276510.767485]: Received marker sample.
[WARN] [1706276510.873287]: Lookup would require extrapolation into the past. Requested time 1706276462.673566580 but the earliest data is at time 1706276500.959419727, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276510.877982]: Received marker sample.
[WARN] [1706276510.981372]: Lookup would require extrapolation into the past. Requested time 1706276491.828450203 but the earliest data is at time 1706276501.059410095, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276510.988869]: Received marker sample.
[INFO] [1706276510.993379]: Computing from 10 poses...
[INFO] [1706276511.025894]: Result:
effector_camera:
translation:
x: 0.070959401661
y: 0.075040870067
z: -0.259511270952
rotation:
x: 0.0312463313258
y: 0.0154148513124
z: -0.997897164362
w: 0.0546561844267
[INFO] [1706276511.028213]: Base xyz: ( 0.070959 0.075041 -0.259511 ) rpy: ( -0.027409 0.064090 -3.033038 ) xyzw: ( -0.031246 -0.015415 0.997897 -0.054656 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276531.213937]: Received marker sample.
[INFO] [1706276531.217285]: Computing from 11 poses...
[INFO] [1706276531.236986]: Result:
effector_camera:
translation:
x: 0.0893108595105
y: 0.0837748575979
z: -0.285631287842
rotation:
x: 0.0262079427241
y: 0.0174306589237
z: -0.999015066324
w: 0.0312763988387
[INFO] [1706276531.239281]: Base xyz: ( 0.089311 0.083775 -0.285631 ) rpy: ( -0.033241 0.053480 -3.079888 ) xyzw: ( -0.026208 -0.017431 0.999015 -0.031276 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706276549.082675007]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276549.082789039]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276551.311654]: Received marker sample.
[INFO] [1706276551.416420]: Computing from 12 poses...
[INFO] [1706276551.462807]: Result:
effector_camera:
translation:
x: 0.0927296490717
y: 0.097725805461
z: -0.336640892736
rotation:
x: 0.0302151583027
y: 0.0163762873726
z: -0.998848763456
w: 0.0334665379662
[INFO] [1706276551.464591]: Base xyz: ( 0.092730 0.097726 -0.336641 ) rpy: ( -0.030755 0.061496 -3.075554 ) xyzw: ( -0.030215 -0.016376 0.998849 -0.033467 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276577.886317]: Received marker sample.
[INFO] [1706276577.892189]: Computing from 13 poses...
[INFO] [1706276577.943893]: Result:
effector_camera:
translation:
x: 0.0908557780049
y: 0.0856510057313
z: -0.311017638437
rotation:
x: 0.0290542829431
y: 0.0168775717007
z: -0.998933215975
w: 0.0316769038567
[INFO] [1706276577.945831]: Base xyz: ( 0.090856 0.085651 -0.311018 ) rpy: ( -0.031940 0.059150 -3.079137 ) xyzw: ( -0.029054 -0.016878 0.998933 -0.031677 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276598.446078]: Received marker sample.
[INFO] [1706276598.501817]: Computing from 14 poses...
[INFO] [1706276598.546439]: Result:
effector_camera:
translation:
x: 0.097892462852
y: 0.108647934007
z: -0.400890478012
rotation:
x: 0.0305061924055
y: 0.01104022739
z: -0.998740040449
w: 0.0382859923106
[INFO] [1706276598.548171]: Base xyz: ( 0.097892 0.108648 -0.400890 ) rpy: ( -0.019756 0.061820 -3.065572 ) xyzw: ( -0.030506 -0.011040 0.998740 -0.038286 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706276609.079694429]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276609.079776161]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276630.329796]: Received marker sample.
[INFO] [1706276630.335770]: Computing from 15 poses...
[INFO] [1706276630.394145]: Result:
effector_camera:
translation:
x: 0.0869276644805
y: 0.0975848687353
z: -0.357650760037
rotation:
x: 0.0319179999601
y: 0.00873040344134
z: -0.998313761631
w: 0.0476933399119
[INFO] [1706276630.395834]: Base xyz: ( 0.086928 0.097585 -0.357651 ) rpy: ( -0.014417 0.064606 -3.046583 ) xyzw: ( -0.031918 -0.008730 0.998314 -0.047693 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276645.395336]: Received marker sample.
[INFO] [1706276645.398620]: Computing from 16 poses...
[INFO] [1706276645.457464]: Result:
effector_camera:
translation:
x: 0.0831830160656
y: 0.0778003466495
z: -0.284183351218
rotation:
x: 0.0318463211743
y: 0.00496624108918
z: -0.998120291467
w: 0.0521251574496
[INFO] [1706276645.459176]: Base xyz: ( 0.083183 0.077800 -0.284183 ) rpy: ( -0.006607 0.064135 -3.037453 ) xyzw: ( -0.031846 -0.004966 0.998120 -0.052125 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706276669.079740526]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276669.079822847]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276681.865800]: Received marker sample.
[INFO] [1706276681.872992]: Computing from 17 poses...
[INFO] [1706276681.937467]: Result:
effector_camera:
translation:
x: 0.14706662118
y: 0.136648266982
z: -0.429058340328
rotation:
x: 0.0388573226911
y: 0.00117113684472
z: -0.997802656524
w: 0.0536525446385
[INFO] [1706276681.939264]: Base xyz: ( 0.147067 0.136648 -0.429058 ) rpy: ( 0.001838 0.077748 -3.034083 ) xyzw: ( -0.038857 -0.001171 0.997803 -0.053653 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276711.540040]: Received marker sample.
[INFO] [1706276711.545933]: Computing from 18 poses...
[INFO] [1706276711.611308]: Result:
effector_camera:
translation:
x: 0.134102996419
y: 0.114486459714
z: -0.449278924528
rotation:
x: 0.0347284279315
y: -0.00107122619589
z: -0.998332481707
w: 0.046098207522
[INFO] [1706276711.613282]: Base xyz: ( 0.134103 0.114486 -0.449279 ) rpy: ( 0.005354 0.069298 -3.049122 ) xyzw: ( -0.034728 0.001071 0.998332 -0.046098 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706276729.080801290]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276729.080901568]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...[ WARN] [1706276789.079882350]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276789.079939973]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706276849.080248988]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276849.080329972]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276851.615637]: Received marker sample.
[WARN] [1706276851.720170]: Lookup would require extrapolation into the past. Requested time 1706276732.743592978 but the earliest data is at time 1706276841.758806944, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276851.727586]: Received marker sample.
[WARN] [1706276851.831802]: Lookup would require extrapolation into the past. Requested time 1706276761.898867130 but the earliest data is at time 1706276841.858764172, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276851.838808]: Received marker sample.
[WARN] [1706276851.944714]: Lookup would require extrapolation into the past. Requested time 1706276791.055039167 but the earliest data is at time 1706276841.958734274, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276851.953430]: Received marker sample.
[WARN] [1706276852.059053]: Lookup would require extrapolation into the past. Requested time 1706276820.210751295 but the earliest data is at time 1706276842.058749199, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276852.066412]: Received marker sample.
[INFO] [1706276852.070570]: Computing from 19 poses...
[INFO] [1706276852.151321]: Result:
effector_camera:
translation:
x: 0.128487400598
y: 0.109527630235
z: -0.443851548914
rotation:
x: 0.0340740529192
y: -0.00126832859012
z: -0.998174793907
w: 0.0498440675312
[INFO] [1706276852.153155]: Base xyz: ( 0.128487 0.109528 -0.443852 ) rpy: ( 0.005943 0.067950 -3.041603 ) xyzw: ( -0.034074 0.001268 0.998175 -0.049844 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276874.868091]: Received marker sample.
[INFO] [1706276874.870735]: Computing from 20 poses...
[INFO] [1706276874.951204]: Result:
effector_camera:
translation:
x: 0.117659804784
y: 0.095146690351
z: -0.411216603859
rotation:
x: 0.0349091131921
y: -0.0024882983821
z: -0.998041399492
w: 0.0518510085435
[INFO] [1706276874.953269]: Base xyz: ( 0.117660 0.095147 -0.411217 ) rpy: ( 0.008608 0.069479 -3.037481 ) xyzw: ( -0.034909 0.002488 0.998041 -0.051851 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706276909.079099134]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276909.079187995]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276937.522813]: Received marker sample.
[WARN] [1706276937.627598]: Lookup would require extrapolation into the past. Requested time 1706276903.942201614 but the earliest data is at time 1706276927.659012794, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706276937.636150]: Received marker sample.
[INFO] [1706276937.642015]: Computing from 21 poses...
[INFO] [1706276937.730786]: Result:
effector_camera:
translation:
x: 0.0622355770227
y: 0.135755710173
z: -0.31422037675
rotation:
x: 0.0345804589938
y: 0.0022763529761
z: -0.998223285308
w: 0.0484694000499
[INFO] [1706276937.732774]: Base xyz: ( 0.062236 0.135756 -0.314220 ) rpy: ( -0.001195 0.069314 -3.044599 ) xyzw: ( -0.034580 -0.002276 0.998223 -0.048469 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706276969.081152255]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706276969.081235132]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706276969.837225]: Received marker sample.
[INFO] [1706276969.842124]: Computing from 22 poses...
[INFO] [1706276969.947041]: Result:
effector_camera:
translation:
x: 0.0471499775708
y: 0.137075499821
z: -0.310899497701
rotation:
x: 0.0350988223507
y: 0.000386508933492
z: -0.998158578792
w: 0.0494709497071
[INFO] [1706276969.949009]: Base xyz: ( 0.047150 0.137075 -0.310899 ) rpy: ( 0.002708 0.070164 -3.042454 ) xyzw: ( -0.035099 -0.000387 0.998159 -0.049471 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706276990.384087]: Received marker sample.
[INFO] [1706276990.388282]: Computing from 23 poses...
[INFO] [1706276990.500398]: Result:
effector_camera:
translation:
x: 0.0475070152203
y: 0.13910995699
z: -0.31467936375
rotation:
x: 0.0348142898635
y: 0.000520084336045
z: -0.998162212843
w: 0.0495972941416
[INFO] [1706276990.502295]: Base xyz: ( 0.047507 0.139110 -0.314679 ) rpy: ( 0.002421 0.069608 -3.042213 ) xyzw: ( -0.034814 -0.000520 0.998162 -0.049597 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706277020.494108]: Received marker sample.
[INFO] [1706277020.499678]: Computing from 24 poses...
[INFO] [1706277020.622646]: Result:
effector_camera:
translation:
x: 0.0487887757559
y: 0.147378258177
z: -0.338069633562
rotation:
x: 0.035064927284
y: 0.00128323954398
z: -0.998077789599
w: 0.0510835597824
[INFO] [1706277020.624563]: Base xyz: ( 0.048789 0.147378 -0.338070 ) rpy: ( 0.001023 0.070184 -3.039282 ) xyzw: ( -0.035065 -0.001283 0.998078 -0.051084 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706277029.077212820]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277029.077266713]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706277089.079481427]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277089.079558225]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706277149.081771255]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277149.081892567]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...
[INFO] [1706277168.382313]: Received marker sample.
[WARN] [1706277168.485428]: Lookup would require extrapolation into the past. Requested time 1706277048.587295294 but the earliest data is at time 1706277158.559066772, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277168.493660]: Received marker sample.
[WARN] [1706277168.599344]: Lookup would require extrapolation into the past. Requested time 1706277077.743822813 but the earliest data is at time 1706277158.559066772, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277168.607664]: Received marker sample.
[WARN] [1706277168.712963]: Lookup would require extrapolation into the past. Requested time 1706277106.899427414 but the earliest data is at time 1706277158.759070396, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277168.717659]: Received marker sample.
[WARN] [1706277168.821089]: Lookup would require extrapolation into the past. Requested time 1706277136.055716753 but the earliest data is at time 1706277158.859030724, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277168.829789]: Received marker sample.
[INFO] [1706277168.835373]: Computing from 25 poses...
[INFO] [1706277168.958361]: Result:
effector_camera:
translation:
x: 0.0438662797172
y: 0.139477215975
z: -0.312753041332
rotation:
x: 0.0345108012718
y: 0.0017230269538
z: -0.998055507476
w: 0.0518771604017
[INFO] [1706277168.960065]: Base xyz: ( 0.043866 0.139477 -0.312753 ) rpy: ( 0.000142 0.069121 -3.037725 ) xyzw: ( -0.034511 -0.001723 0.998056 -0.051877 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706277186.492477]: Received marker sample.
[INFO] [1706277186.495780]: Computing from 26 poses...
[INFO] [1706277186.618231]: Result:
effector_camera:
translation:
x: 0.0439658082405
y: 0.14266513784
z: -0.321536887036
rotation:
x: 0.0342526715124
y: 0.00194004848847
z: -0.998013670825
w: 0.0528365739967
[INFO] [1706277186.619839]: Base xyz: ( 0.043966 0.142665 -0.321537 ) rpy: ( -0.000253 0.068628 -3.035817 ) xyzw: ( -0.034253 -0.001940 0.998014 -0.052837 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706277209.078447093]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277209.078521136]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...
[INFO] [1706277237.897293]: Received marker sample.
[WARN] [1706277238.001855]: Lookup would require extrapolation into the past. Requested time 1706277215.514792681 but the earliest data is at time 1706277228.059715986, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277238.009614]: Received marker sample.
[INFO] [1706277238.015488]: Computing from 27 poses...
[INFO] [1706277238.159892]: Result:
effector_camera:
translation:
x: 0.0420264237013
y: 0.149115366285
z: -0.338399650476
rotation:
x: 0.0354737104935
y: 0.000811645216433
z: -0.997830464323
w: 0.0554555819149
[INFO] [1706277238.161841]: Base xyz: ( 0.042026 0.149115 -0.338400 ) rpy: ( 0.002321 0.070943 -3.030472 ) xyzw: ( -0.035474 -0.000812 0.997830 -0.055456 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706277255.857371]: Received marker sample.
[INFO] [1706277255.913011]: Computing from 28 poses...
[INFO] [1706277256.050235]: Result:
effector_camera:
translation:
x: 0.0411696506342
y: 0.141946517888
z: -0.317313130183
rotation:
x: 0.0345376242897
y: 0.00110708555591
z: -0.997967689236
w: 0.0535389401321
[INFO] [1706277256.051922]: Base xyz: ( 0.041170 0.141947 -0.317313 ) rpy: ( 0.001492 0.069108 -3.034348 ) xyzw: ( -0.034538 -0.001107 0.997968 -0.053539 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706277269.079560708]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277269.079646248]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706277278.773690]: Received marker sample.
[INFO] [1706277278.779544]: Computing from 29 poses...
[INFO] [1706277278.953521]: Result:
effector_camera:
translation:
x: 0.0392966221665
y: 0.137992523431
z: -0.303323268715
rotation:
x: 0.0341330012968
y: 0.00105382078668
z: -0.998000178413
w: 0.0531927774375
[INFO] [1706277278.955088]: Base xyz: ( 0.039297 0.137993 -0.303323 ) rpy: ( 0.001531 0.068295 -3.035042 ) xyzw: ( -0.034133 -0.001054 0.998000 -0.053193 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706277329.081643361]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277329.081759307]: The input topic '/camera/color/world_effector' is not yet advertised
26/01 21:56:15,433 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 21:56:16,436 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 21:56:17,439 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
[ WARN] [1706277389.079069534]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277389.079134286]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706277449.077917154]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277449.077981107]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706277509.081767165]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277509.081851811]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706277569.075955488]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277569.075989605]: The input topic '/camera/color/world_effector' is not yet advertised
[ WARN] [1706277629.076456149]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277629.076502817]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...
[INFO] [1706277681.577513]: Received marker sample.
[WARN] [1706277681.683518]: Lookup would require extrapolation into the past. Requested time 1706277307.782629251 but the earliest data is at time 1706277671.759036064, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277681.693146]: Received marker sample.
[WARN] [1706277681.797873]: Lookup would require extrapolation into the past. Requested time 1706277336.937898397 but the earliest data is at time 1706277671.859082460, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277681.804598]: Received marker sample.
[WARN] [1706277681.909973]: Lookup would require extrapolation into the past. Requested time 1706277366.092926502 but the earliest data is at time 1706277671.959048271, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277681.917826]: Received marker sample.
[WARN] [1706277682.022524]: Lookup would require extrapolation into the past. Requested time 1706277395.248031139 but the earliest data is at time 1706277672.059086800, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.029033]: Received marker sample.
[WARN] [1706277682.133399]: Lookup would require extrapolation into the past. Requested time 1706277424.403166771 but the earliest data is at time 1706277672.159007311, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.141915]: Received marker sample.
[WARN] [1706277682.247307]: Lookup would require extrapolation into the past. Requested time 1706277453.558396816 but the earliest data is at time 1706277672.259107590, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.252797]: Received marker sample.
[WARN] [1706277682.357629]: Lookup would require extrapolation into the past. Requested time 1706277482.713629484 but the earliest data is at time 1706277672.359012365, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.364987]: Received marker sample.
[WARN] [1706277682.470914]: Lookup would require extrapolation into the past. Requested time 1706277511.867641211 but the earliest data is at time 1706277672.559124470, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.479599]: Received marker sample.
[WARN] [1706277682.585286]: Lookup would require extrapolation into the past. Requested time 1706277541.024182320 but the earliest data is at time 1706277672.659104824, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.591394]: Received marker sample.
[WARN] [1706277682.695935]: Lookup would require extrapolation into the past. Requested time 1706277570.178483009 but the earliest data is at time 1706277672.759118080, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.699636]: Received marker sample.
[WARN] [1706277682.802505]: Lookup would require extrapolation into the past. Requested time 1706277599.268281460 but the earliest data is at time 1706277672.859116316, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.810957]: Received marker sample.
[WARN] [1706277682.916332]: Lookup would require extrapolation into the past. Requested time 1706277628.423645020 but the earliest data is at time 1706277672.959073305, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277682.925276]: Received marker sample.
[WARN] [1706277683.030706]: Lookup would require extrapolation into the past. Requested time 1706277657.579159737 but the earliest data is at time 1706277673.059125900, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277683.035019]: Received marker sample.
[INFO] [1706277683.088540]: Computing from 30 poses...
[INFO] [1706277683.252945]: Result:
effector_camera:
translation:
x: 0.0431953831241
y: 0.143523890506
z: -0.324944730104
rotation:
x: 0.0362861922373
y: 0.00277050783042
z: -0.997790211236
w: 0.055590744736
[INFO] [1706277683.254639]: Base xyz: ( 0.043195 0.143524 -0.324945 ) rpy: ( -0.001498 0.072784 -3.030335 ) xyzw: ( -0.036286 -0.002771 0.997790 -0.055591 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706277689.081733952]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277689.081849899]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706277704.104484]: Received marker sample.
[INFO] [1706277704.207999]: Computing from 31 poses...
[INFO] [1706277704.406586]: Result:
effector_camera:
translation:
x: 0.0457969638942
y: 0.15294382272
z: -0.348212061058
rotation:
x: 0.0361425603129
y: 0.00260106419853
z: -0.997689586855
w: 0.0574668433043
[INFO] [1706277704.408165]: Base xyz: ( 0.045797 0.152944 -0.348212 ) rpy: ( -0.001039 0.072481 -3.026558 ) xyzw: ( -0.036143 -0.002601 0.997690 -0.057467 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample... 26/01 22:02:09,578 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:02:10,582 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:02:11,586 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
[INFO] [1706277733.385733]: Received marker sample.
[INFO] [1706277733.391449]: Computing from 32 poses...
[INFO] [1706277733.612644]: Result:
effector_camera:
translation:
x: 0.0463784649183
y: 0.151063633696
z: -0.343347537552
rotation:
x: 0.0360088560237
y: 0.00271712838178
z: -0.997719764614
w: 0.0570197404347
[INFO] [1706277733.614229]: Base xyz: ( 0.046378 0.151064 -0.343348 ) rpy: ( -0.001319 0.072226 -3.027464 ) xyzw: ( -0.036009 -0.002717 0.997720 -0.057020 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706277749.082504350]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277749.082619956]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706277755.964128]: Received marker sample.
[INFO] [1706277755.969423]: Computing from 33 poses...
[INFO] [1706277756.194882]: Result:
effector_camera:
translation:
x: 0.0415755596961
y: 0.135248164365
z: -0.292530915452
rotation:
x: 0.0355881451793
y: 0.00318975999195
z: -0.997810473959
w: 0.0556557940588
[INFO] [1706277756.196970]: Base xyz: ( 0.041576 0.135248 -0.292531 ) rpy: ( -0.002410 0.071436 -3.030238 ) xyzw: ( -0.035588 -0.003190 0.997810 -0.055656 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706277786.393427]: Received marker sample.
[INFO] [1706277786.397435]: Computing from 34 poses...
[INFO] [1706277786.702080]: Result:
effector_camera:
translation:
x: 0.0401855380362
y: 0.144230889106
z: -0.318175157859
rotation:
x: 0.036098194231
y: 0.00185410731687
z: -0.997480796369
w: 0.0610372307292
[INFO] [1706277786.703811]: Base xyz: ( 0.040186 0.144231 -0.318175 ) rpy: ( 0.000710 0.072304 -3.019337 ) xyzw: ( -0.036098 -0.001854 0.997481 -0.061037 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706277809.081459464]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277809.081576486]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706277815.884920]: Received marker sample.
[INFO] [1706277815.888100]: Computing from 35 poses...
[INFO] [1706277816.186822]: Result:
effector_camera:
translation:
x: 0.0381055389969
y: 0.141791049267
z: -0.309479156025
rotation:
x: 0.0361170443316
y: 0.00175765644264
z: -0.997462456125
w: 0.0613279575184
[INFO] [1706277816.188636]: Base xyz: ( 0.038106 0.141791 -0.309479 ) rpy: ( 0.000926 0.072329 -3.018746 ) xyzw: ( -0.036117 -0.001758 0.997462 -0.061328 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706277846.580649]: Received marker sample.
[INFO] [1706277846.583929]: Computing from 36 poses...
[INFO] [1706277846.860861]: Result:
effector_camera:
translation:
x: 0.0374779563523
y: 0.146721631538
z: -0.319666872684
rotation:
x: 0.0367024658953
y: 0.00118570833278
z: -0.997257279143
w: 0.0642607367634
[INFO] [1706277846.863226]: Base xyz: ( 0.037478 0.146722 -0.319667 ) rpy: ( 0.002358 0.073422 -3.012809 ) xyzw: ( -0.036702 -0.001186 0.997257 -0.064261 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706277869.079855965]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277869.079909244]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706277875.875541]: Received marker sample.
[INFO] [1706277875.879777]: Computing from 37 poses...
[INFO] [1706277876.190602]: Result:
effector_camera:
translation:
x: 0.0399993213265
y: 0.159625808821
z: -0.348860528944
rotation:
x: 0.0365426298981
y: 0.000880268810264
z: -0.997044059224
w: 0.0675796218784
[INFO] [1706277876.192432]: Base xyz: ( 0.039999 0.159626 -0.348861 ) rpy: ( 0.003192 0.073053 -3.006123 ) xyzw: ( -0.036543 -0.000880 0.997044 -0.067580 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706277925.084869]: Received marker sample.
[WARN] [1706277925.190872]: Lookup would require extrapolation into the past. Requested time 1706277901.631961107 but the earliest data is at time 1706277915.159634590, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277925.195227]: Received marker sample.
[INFO] [1706277925.198407]: Computing from 38 poses...
[INFO] [1706277925.546333]: Result:
effector_camera:
translation:
x: 0.031002002073
y: 0.154777251641
z: -0.329978372073
rotation:
x: 0.0378558214565
y: -0.000967433102235
z: -0.996685015251
w: 0.0720068137671
[INFO] [1706277925.548232]: Base xyz: ( 0.031002 0.154777 -0.329978 ) rpy: ( 0.007401 0.075393 -2.997072 ) xyzw: ( -0.037856 0.000967 0.996685 -0.072007 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706277929.082283783]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277929.082403568]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...
[INFO] [1706277982.438041]: Received marker sample.
[WARN] [1706277982.543633]: Lookup would require extrapolation into the past. Requested time 1706277954.205577850 but the earliest data is at time 1706277972.559135437, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706277982.549851]: Received marker sample.
[INFO] [1706277982.605154]: Computing from 39 poses...
[INFO] [1706277982.982618]: Result:
effector_camera:
translation:
x: 0.0219174196315
y: 0.14843004544
z: -0.306717692404
rotation:
x: 0.0391713384693
y: -0.00251334524674
z: -0.996324665042
w: 0.0761344282597
[INFO] [1706277982.984555]: Base xyz: ( 0.021917 0.148430 -0.306718 ) rpy: ( 0.011006 0.077750 -2.988630 ) xyzw: ( -0.039171 0.002513 0.996325 -0.076134 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706277989.082372087]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706277989.082484890]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278001.856879]: Received marker sample.
[INFO] [1706278001.913174]: Computing from 40 poses...
[INFO] [1706278002.296108]: Result:
effector_camera:
translation:
x: 0.020470876674
y: 0.144769786319
z: -0.288955131078
rotation:
x: 0.0354371339756
y: -0.00302558704674
z: -0.996644644332
w: 0.0737191174843
[INFO] [1706278002.298110]: Base xyz: ( 0.020471 0.144770 -0.288955 ) rpy: ( 0.011284 0.070248 -2.993530 ) xyzw: ( -0.035437 0.003026 0.996645 -0.073719 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278032.911877]: Received marker sample.
[INFO] [1706278032.916060]: Computing from 41 poses...
[INFO] [1706278033.347901]: Result:
effector_camera:
translation:
x: 0.026972141407
y: 0.152017551257
z: -0.310616362005
rotation:
x: 0.0362282993216
y: -0.00341726752868
z: -0.996490479988
w: 0.0753827294832
[INFO] [1706278033.349886]: Base xyz: ( 0.026972 0.152018 -0.310616 ) rpy: ( 0.012304 0.071749 -2.990142 ) xyzw: ( -0.036228 0.003417 0.996490 -0.075383 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706278049.079548131]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278049.079636237]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278065.307405]: Received marker sample.
[INFO] [1706278065.313334]: Computing from 42 poses...
[INFO] [1706278065.771385]: Result:
effector_camera:
translation:
x: 0.0246855434365
y: 0.148914915885
z: -0.28654841595
rotation:
x: 0.0362770313465
y: -0.0029218498289
z: -0.996323436917
w: 0.0775567459387
[INFO] [1706278065.773332]: Base xyz: ( 0.024686 0.148915 -0.286548 ) rpy: ( 0.011479 0.071896 -2.985807 ) xyzw: ( -0.036277 0.002922 0.996323 -0.077557 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278085.075148]: Received marker sample.
[INFO] [1706278085.080956]: Computing from 43 poses...
[INFO] [1706278085.594056]: Result:
effector_camera:
translation:
x: 0.0250677081978
y: 0.157086565696
z: -0.293118101634
rotation:
x: 0.0355420185749
y: -0.0027331466427
z: -0.996235214673
w: 0.0790233628135
[INFO] [1706278085.595737]: Base xyz: ( 0.025068 0.157087 -0.293118 ) rpy: ( 0.011091 0.070443 -2.982889 ) xyzw: ( -0.035542 0.002733 0.996235 -0.079023 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278105.531076]: Received marker sample.
[INFO] [1706278105.536859]: Computing from 44 poses...
[INFO] [1706278106.140543]: Result:
effector_camera:
translation:
x: 0.0308474236567
y: 0.159559507045
z: -0.301346645552
rotation:
x: 0.0363323188166
y: -0.00238479749676
z: -0.996108909459
w: 0.0802578086386
[INFO] [1706278106.142205]: Base xyz: ( 0.030847 0.159560 -0.301347 ) rpy: ( 0.010611 0.072061 -2.980415 ) xyzw: ( -0.036332 0.002385 0.996109 -0.080258 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706278109.081461485]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278109.081649042]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278124.678595]: Received marker sample.
[INFO] [1706278124.683853]: Computing from 45 poses...
[INFO] [1706278125.277054]: Result:
effector_camera:
translation:
x: 0.0300346786908
y: 0.158320642265
z: -0.300282503346
rotation:
x: 0.0367075384097
y: -0.00272737444324
z: -0.996021895048
w: 0.0811511098916
[INFO] [1706278125.279270]: Base xyz: ( 0.030035 0.158321 -0.300283 ) rpy: ( 0.011421 0.072745 -2.978586 ) xyzw: ( -0.036708 0.002727 0.996022 -0.081151 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278142.625808]: Received marker sample.
[INFO] [1706278142.631694]: Computing from 46 poses...
[INFO] [1706278143.250142]: Result:
effector_camera:
translation:
x: 0.0281910920535
y: 0.15873906827
z: -0.309566550967
rotation:
x: 0.036573134271
y: -0.00318548929828
z: -0.995936596887
w: 0.0822347462321
[INFO] [1706278143.251824]: Base xyz: ( 0.028191 0.158739 -0.309567 ) rpy: ( 0.012393 0.072388 -2.976377 ) xyzw: ( -0.036573 0.003185 0.995937 -0.082235 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278160.683221]: Received marker sample.
[INFO] [1706278160.689209]: Computing from 47 poses...
[INFO] [1706278161.363379]: Result:
effector_camera:
translation:
x: 0.0285782639948
y: 0.156508680055
z: -0.309775919863
rotation:
x: 0.036407053922
y: -0.00344317296979
z: -0.995948306164
w: 0.082156207523
[INFO] [1706278161.365386]: Base xyz: ( 0.028578 0.156509 -0.309776 ) rpy: ( 0.012874 0.072016 -2.976521 ) xyzw: ( -0.036407 0.003443 0.995948 -0.082156 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706278169.081736578]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278169.081847830]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...
[INFO] [1706278193.140107]: Received marker sample.
[INFO] [1706278193.146474]: Computing from 48 poses...
[INFO] [1706278193.835615]: Result:
effector_camera:
translation:
x: 0.0259370442519
y: 0.145607429704
z: -0.2767044934
rotation:
x: 0.0362248913855
y: -0.00325212042283
z: -0.99598274023
w: 0.0818264145659
[INFO] [1706278193.837303]: Base xyz: ( 0.025937 0.145607 -0.276704 ) rpy: ( 0.012439 0.071688 -2.977202 ) xyzw: ( -0.036225 0.003252 0.995983 -0.081826 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278214.961291]: Received marker sample.
[INFO] [1706278215.019279]: Computing from 49 poses...
[INFO] [1706278215.727282]: Result:
effector_camera:
translation:
x: 0.0276540290879
y: 0.135930717239
z: -0.25131086907
rotation:
x: 0.0361839141832
y: -0.00255012939743
z: -0.996077646679
w: 0.0807065237788
[INFO] [1706278215.729030]: Base xyz: ( 0.027654 0.135931 -0.251311 ) rpy: ( 0.010949 0.071734 -2.979504 ) xyzw: ( -0.036184 0.002550 0.996078 -0.080707 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706278229.082248772]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278229.082364633]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278236.391281]: Received marker sample.
[INFO] [1706278236.397308]: Computing from 50 poses...
[INFO] [1706278237.165432]: Result:
effector_camera:
translation:
x: 0.0290226201273
y: 0.126157909606
z: -0.226862570987
rotation:
x: 0.0361906031014
y: -0.00193003342228
z: -0.996164189915
w: 0.0796456022007
[INFO] [1706278237.167401]: Base xyz: ( 0.029023 0.126158 -0.226863 ) rpy: ( 0.009635 0.071858 -2.981681 ) xyzw: ( -0.036191 0.001930 0.996164 -0.079646 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278254.623697]: Received marker sample.
[INFO] [1706278254.677197]: Computing from 51 poses...
[INFO] [1706278255.485565]: Result:
effector_camera:
translation:
x: 0.032601814693
y: 0.124575540854
z: -0.220374372031
rotation:
x: 0.0358653977333
y: -0.000753730145671
z: -0.996258144747
w: 0.0786308728232
[INFO] [1706278255.487106]: Base xyz: ( 0.032602 0.124576 -0.220374 ) rpy: ( 0.007160 0.071405 -2.983811 ) xyzw: ( -0.035865 0.000754 0.996258 -0.078631 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706278289.082062382]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278289.082177015]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...
[INFO] [1706278330.774768]: Received marker sample.
[WARN] [1706278330.878129]: Lookup would require extrapolation into the past. Requested time 1706278283.659145832 but the earliest data is at time 1706278320.959208727, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706278330.882178]: Received marker sample.
[WARN] [1706278330.985664]: Lookup would require extrapolation into the past. Requested time 1706278312.815388680 but the earliest data is at time 1706278321.059174776, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706278330.991234]: Received marker sample.
[INFO] [1706278330.994282]: Computing from 52 poses...
[INFO] [1706278331.843394]: Result:
effector_camera:
translation:
x: 0.0321379579833
y: 0.11941678782
z: -0.200321769632
rotation:
x: 0.0358378641551
y: -0.000498969403108
z: -0.996281257861
w: 0.0783521139263
[INFO] [1706278331.845243]: Base xyz: ( 0.032138 0.119417 -0.200322 ) rpy: ( 0.006627 0.071392 -2.984390 ) xyzw: ( -0.035838 0.000499 0.996281 -0.078352 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706278349.078700788]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278349.078781282]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278351.795829]: Received marker sample.
[INFO] [1706278351.800036]: Computing from 53 poses...
[INFO] [1706278352.730774]: Result:
effector_camera:
translation:
x: 0.0278253785533
y: 0.107878936068
z: -0.171866687918
rotation:
x: 0.0354740849359
y: -0.000562876138839
z: -0.996265283127
w: 0.0787194899959
[INFO] [1706278352.732332]: Base xyz: ( 0.027825 0.107879 -0.171867 ) rpy: ( 0.006723 0.070653 -2.983654 ) xyzw: ( -0.035474 0.000563 0.996265 -0.078719 )
Hit [enter] to accept this latest sample, or `d` to discard: Hit [enter] to capture the next sample...
[INFO] [1706278356.244447]: Received marker sample.
[INFO] [1706278356.300228]: Computing from 54 poses...
[INFO] [1706278357.254498]: Result:
effector_camera:
translation:
x: 0.0247346070287
y: 0.0984587006305
z: -0.148148379164
rotation:
x: 0.0352170506856
y: -0.000664512123408
z: -0.996255713053
w: 0.0789548730178
[INFO] [1706278357.256367]: Base xyz: ( 0.024735 0.098459 -0.148148 ) rpy: ( 0.006902 0.070123 -2.983178 ) xyzw: ( -0.035217 0.000665 0.996256 -0.078955 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278371.690153]: Received marker sample.
[INFO] [1706278371.794256]: Computing from 55 poses...
[INFO] [1706278372.903029]: Result:
effector_camera:
translation:
x: 0.0275415071515
y: 0.0990854190703
z: -0.162141428445
rotation:
x: 0.0345671160595
y: -0.00127171948222
z: -0.996278522353
w: 0.0789468372681
[INFO] [1706278372.904732]: Base xyz: ( 0.027542 0.099085 -0.162141 ) rpy: ( 0.008011 0.068730 -2.983164 ) xyzw: ( -0.034567 0.001272 0.996279 -0.078947 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278394.325370]: Received marker sample.
[INFO] [1706278394.378176]: Computing from 56 poses...
[INFO] [1706278395.601966]: Result:
effector_camera:
translation:
x: 0.0278245030511
y: 0.100684478322
z: -0.167074299079
rotation:
x: 0.0346300439407
y: -0.00149736854626
z: -0.996273357175
w: 0.0789804768715
[INFO] [1706278395.603630]: Base xyz: ( 0.027825 0.100684 -0.167074 ) rpy: ( 0.008474 0.068820 -2.983080 ) xyzw: ( -0.034630 0.001497 0.996273 -0.078980 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706278409.079337701]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278409.079429231]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278413.768791]: Received marker sample.
[INFO] [1706278413.775518]: Computing from 57 poses...
[INFO] [1706278414.972386]: Result:
effector_camera:
translation:
x: 0.0220859323285
y: 0.0964055872617
z: -0.146701396856
rotation:
x: 0.0356102655939
y: -0.00178221782771
z: -0.996113716772
w: 0.0805369228511
[INFO] [1706278414.974410]: Base xyz: ( 0.022086 0.096406 -0.146701 ) rpy: ( 0.009310 0.070716 -2.979912 ) xyzw: ( -0.035610 0.001782 0.996114 -0.080537 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278436.223463]: Received marker sample.
[INFO] [1706278436.277833]: Computing from 58 poses...
[INFO] [1706278437.465500]: Result:
effector_camera:
translation:
x: 0.0271638644841
y: 0.0991601035271
z: -0.161650335139
rotation:
x: 0.035120273366
y: -0.0015824643202
z: -0.996279336644
w: 0.0786863748159
[INFO] [1706278437.467221]: Base xyz: ( 0.027164 0.099160 -0.161650 ) rpy: ( 0.008701 0.069787 -2.983656 ) xyzw: ( -0.035120 0.001582 0.996279 -0.078686 )
Hit [enter] to accept this latest sample, or `d` to discard: 26/01 22:14:09,928 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:14:10,931 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:14:11,935 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
Hit [enter] to capture the next sample...
[INFO] [1706278460.694151]: Received marker sample.
[INFO] [1706278460.797577]: Computing from 59 poses...
[INFO] [1706278462.066696]: Result:
effector_camera:
translation:
x: 0.0261286716853
y: 0.0946869691366
z: -0.148960212102
rotation:
x: 0.0350763737119
y: -0.00137004095089
z: -0.996288800947
w: 0.078590050912
[INFO] [1706278462.068298]: Base xyz: ( 0.026129 0.094687 -0.148960 ) rpy: ( 0.008263 0.069734 -2.983865 ) xyzw: ( -0.035076 0.001370 0.996289 -0.078590 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706278469.081747094]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278469.081869656]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278477.619606]: Received marker sample.
[INFO] [1706278477.625593]: Computing from 60 poses...
[INFO] [1706278479.030443]: Result:
effector_camera:
translation:
x: 0.0297483137188
y: 0.0963027597139
z: -0.152042455389
rotation:
x: 0.0348936329956
y: -0.000840059505854
z: -0.996335889449
w: 0.0780802412375
[INFO] [1706278479.032595]: Base xyz: ( 0.029748 0.096303 -0.152042 ) rpy: ( 0.007140 0.069456 -2.984929 ) xyzw: ( -0.034894 0.000840 0.996336 -0.078080 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...[ WARN] [1706278529.078742763]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278529.078819711]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278531.410137]: Received marker sample.
[WARN] [1706278531.513278]: Lookup would require extrapolation into the past. Requested time 1706278506.631353617 but the earliest data is at time 1706278521.559078217, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706278531.519300]: Received marker sample.
[INFO] [1706278531.523196]: Computing from 61 poses...
[INFO] [1706278532.853788]: Result:
effector_camera:
translation:
x: 0.0779289516106
y: 0.104188500007
z: -0.210428726711
rotation:
x: 0.0247792960676
y: 0.00706292222887
z: -0.998929476
w: 0.0384187922146
[INFO] [1706278532.855654]: Base xyz: ( 0.077929 0.104189 -0.210429 ) rpy: ( -0.012222 0.050069 -3.065017 ) xyzw: ( -0.024779 -0.007063 0.998929 -0.038419 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278547.329265]: Received marker sample.
[INFO] [1706278547.384987]: Computing from 62 poses...
[INFO] [1706278548.832017]: Result:
effector_camera:
translation:
x: 0.0907842362964
y: 0.0920558958389
z: -0.185631063523
rotation:
x: 0.0208913384188
y: 0.0108394974577
z: -0.999502525726
w: 0.0209942454189
[INFO] [1706278548.833573]: Base xyz: ( 0.090784 0.092056 -0.185631 ) rpy: ( -0.020811 0.042230 -3.100029 ) xyzw: ( -0.020891 -0.010839 0.999503 -0.020994 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278563.453925]: Received marker sample.
[INFO] [1706278563.509477]: Computing from 63 poses...
[INFO] [1706278564.980578]: Result:
effector_camera:
translation:
x: 0.10302634618
y: 0.0867562960431
z: -0.200298040691
rotation:
x: 0.019469073869
y: 0.012979848944
z: -0.999681107285
w: 0.00949538946406
[INFO] [1706278564.982570]: Base xyz: ( 0.103026 0.086756 -0.200298 ) rpy: ( -0.025604 0.039182 -3.123098 ) xyzw: ( -0.019469 -0.012980 0.999681 -0.009495 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample... 26/01 22:16:24,361 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:16:25,364 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:16:26,368 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
[INFO] [1706278587.198590]: Received marker sample.
[INFO] [1706278587.303031]: Computing from 64 poses...
[INFO] [1706278588.867278]: Result:
effector_camera:
translation:
x: 0.117353893193
y: 0.0844458313272
z: -0.195467217361
rotation:
x: -0.0142873458184
y: -0.0159770201068
z: 0.999745355364
w: 0.0070591080766
[INFO] [1706278588.869152]: Base xyz: ( 0.117354 0.084446 -0.195467 ) rpy: ( -0.032166 0.028346 3.127015 ) xyzw: ( -0.014287 -0.015977 0.999745 0.007059 )
Hit [enter] to accept this latest sample, or `d` to discard: [ WARN] [1706278589.081141539]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278589.081252869]: The input topic '/camera/color/world_effector' is not yet advertised
Hit [enter] to capture the next sample...[ WARN] [1706278649.082344041]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278649.082465131]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278663.977631]: Received marker sample.
[WARN] [1706278664.083656]: Lookup would require extrapolation into the past. Requested time 1706278616.249557018 but the earliest data is at time 1706278654.059693813, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706278664.092548]: Received marker sample.
[WARN] [1706278664.198807]: Lookup would require extrapolation into the past. Requested time 1706278645.404597282 but the earliest data is at time 1706278654.159705162, when looking up transform from frame [j2s7s300_end_effector] to frame [world]
[INFO] [1706278664.206509]: Received marker sample.
[INFO] [1706278664.211939]: Computing from 65 poses...
[INFO] [1706278665.860309]: Result:
effector_camera:
translation:
x: 0.10338408853
y: 0.0750787469351
z: -0.207065594332
rotation:
x: -0.0133089558014
y: -0.0146083944187
z: 0.99974686097
w: 0.0107554864342
[INFO] [1706278665.862444]: Base xyz: ( 0.103384 0.075079 -0.207066 ) rpy: ( -0.029510 0.026300 3.119689 ) xyzw: ( -0.013309 -0.014608 0.999747 0.010755 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample... 26/01 22:17:54,656 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:17:55,659 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:17:56,663 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
[INFO] [1706278686.850966]: Received marker sample.
[INFO] [1706278686.906876]: Computing from 66 poses...
[INFO] [1706278688.621173]: Result:
effector_camera:
translation:
x: 0.0791413682513
y: 0.0679161486829
z: -0.224370684898
rotation:
x: -0.0124229203841
y: -0.0126352594186
z: 0.9997691519
w: 0.0121517150507
[INFO] [1706278688.622821]: Base xyz: ( 0.079141 0.067916 -0.224371 ) rpy: ( -0.025577 0.024535 3.116971 ) xyzw: ( -0.012423 -0.012635 0.999769 0.012152 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample... 26/01 22:18:24,754 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:18:25,757 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
26/01 22:18:26,760 ERROR [139986053617408] (ds5-options.cpp:88) Asic Temperature value is not valid!
[INFO] [1706278708.107003]: Received marker sample.
[INFO] [1706278708.111621]: Computing from 67 poses...
[INFO] [1706278709.995303]: Result:
effector_camera:
translation:
x: 0.0828735864194
y: 0.0521106965539
z: -0.222781554284
rotation:
x: -0.0123667299723
y: -0.010587597992
z: 0.999720685602
w: 0.0171323535573
[ WARN] [1706278709.997243214]: The input topic '/camera/color/camera_object' is not yet advertised
[ WARN] [1706278709.997280169]: The input topic '/camera/color/world_effector' is not yet advertised
[INFO] [1706278709.997704]: Base xyz: ( 0.082874 0.052111 -0.222782 ) rpy: ( -0.021601 0.024366 3.107059 ) xyzw: ( -0.012367 -0.010588 0.999721 0.017132 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278730.358477]: Received marker sample.
[INFO] [1706278730.413910]: Computing from 68 poses...
[INFO] [1706278732.302801]: Result:
effector_camera:
translation:
x: 0.0839868108908
y: 0.0524433759917
z: -0.222301208957
rotation:
x: -0.0127997522817
y: -0.0101966778166
z: 0.999711795254
w: 0.0175647525978
[INFO] [1706278732.304778]: Base xyz: ( 0.083987 0.052443 -0.222301 ) rpy: ( -0.020845 0.025237 3.106194 ) xyzw: ( -0.012800 -0.010197 0.999712 0.017565 )
Hit [enter] to accept this latest sample, or `d` to discard:
Hit [enter] to capture the next sample...
[INFO] [1706278747.014779]: Received marker sample.
[INFO] [1706278747.020864]: Computing from 69 poses...
[INFO] [1706278749.040042]: Result:
effector_camera:
translation:
x: 0.0784766804442
y: 0.051998270328
z: -0.22600340149
rotation:
x: -0.0124279078618
y: -0.0099205839706
z: 0.999721208418
w: 0.0174537835061
[INFO] [1706278749.041844]: Base xyz: ( 0.078477 0.051998 -0.226003 ) rpy: ( -0.020277 0.024505 3.106430 ) xyzw: ( -0.012428 -0.009921 0.999721 0.017454 )
Hit [enter] to accept this latest sample, or `d` to discard:
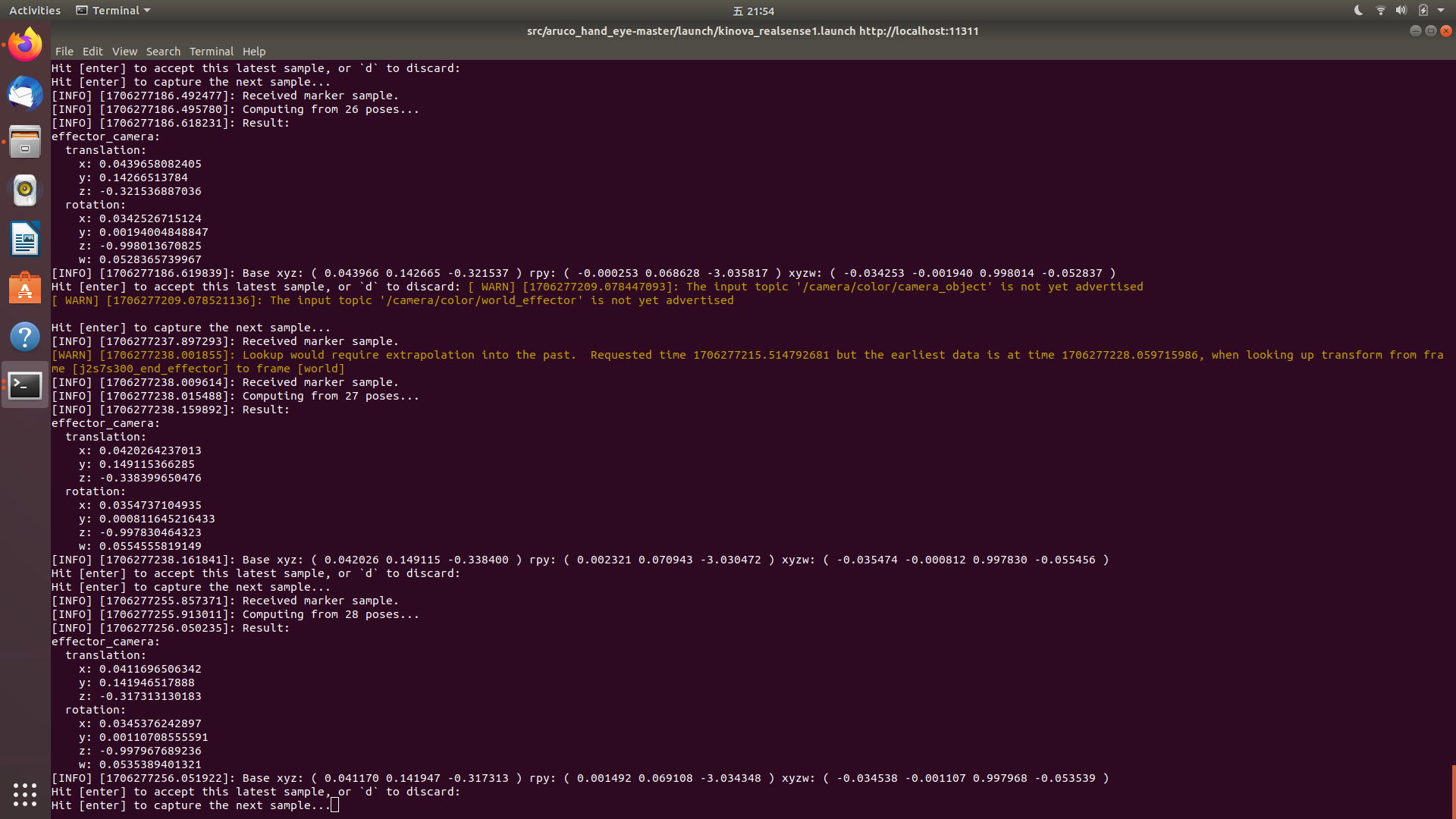
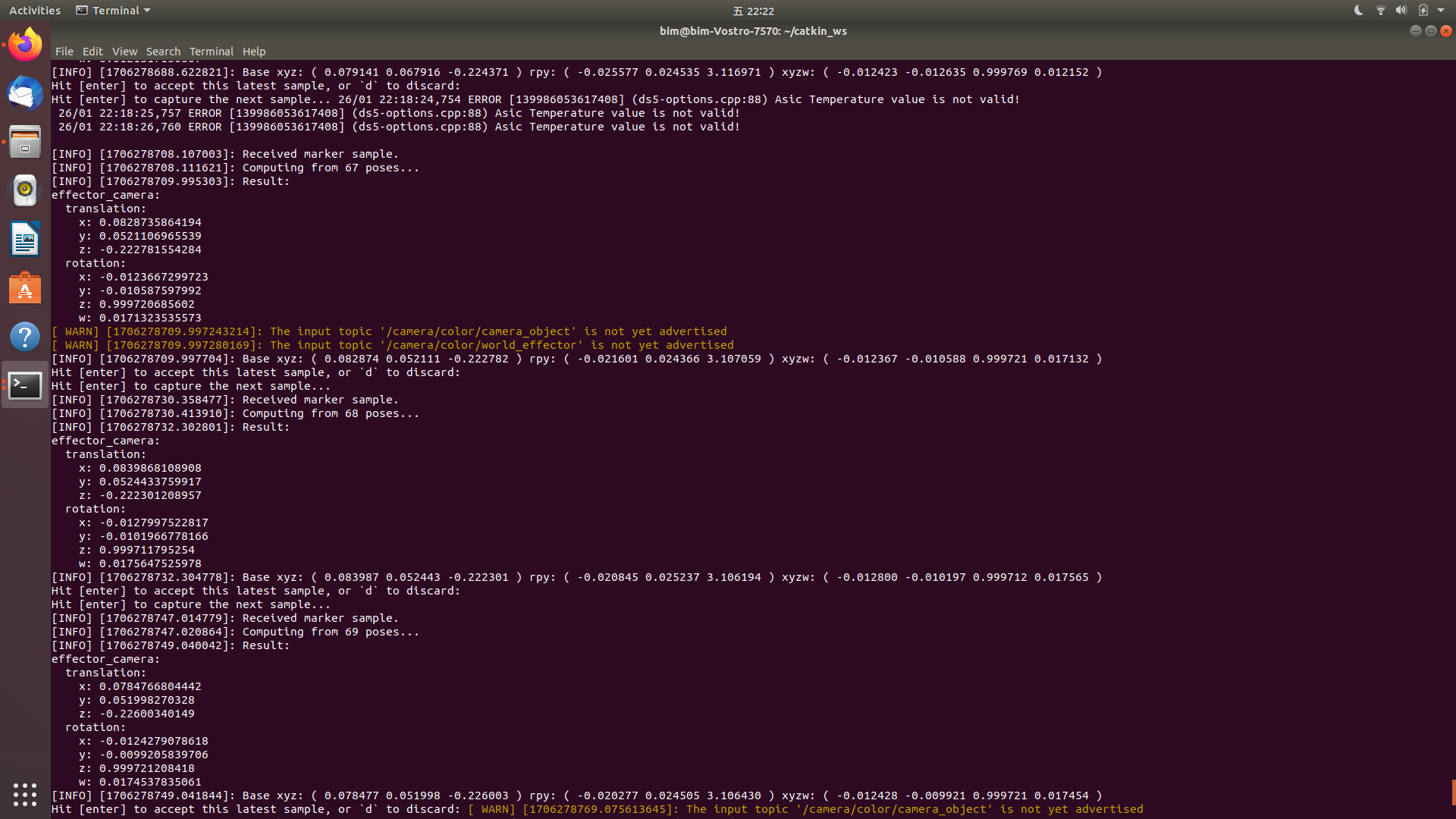
rqt_image_view
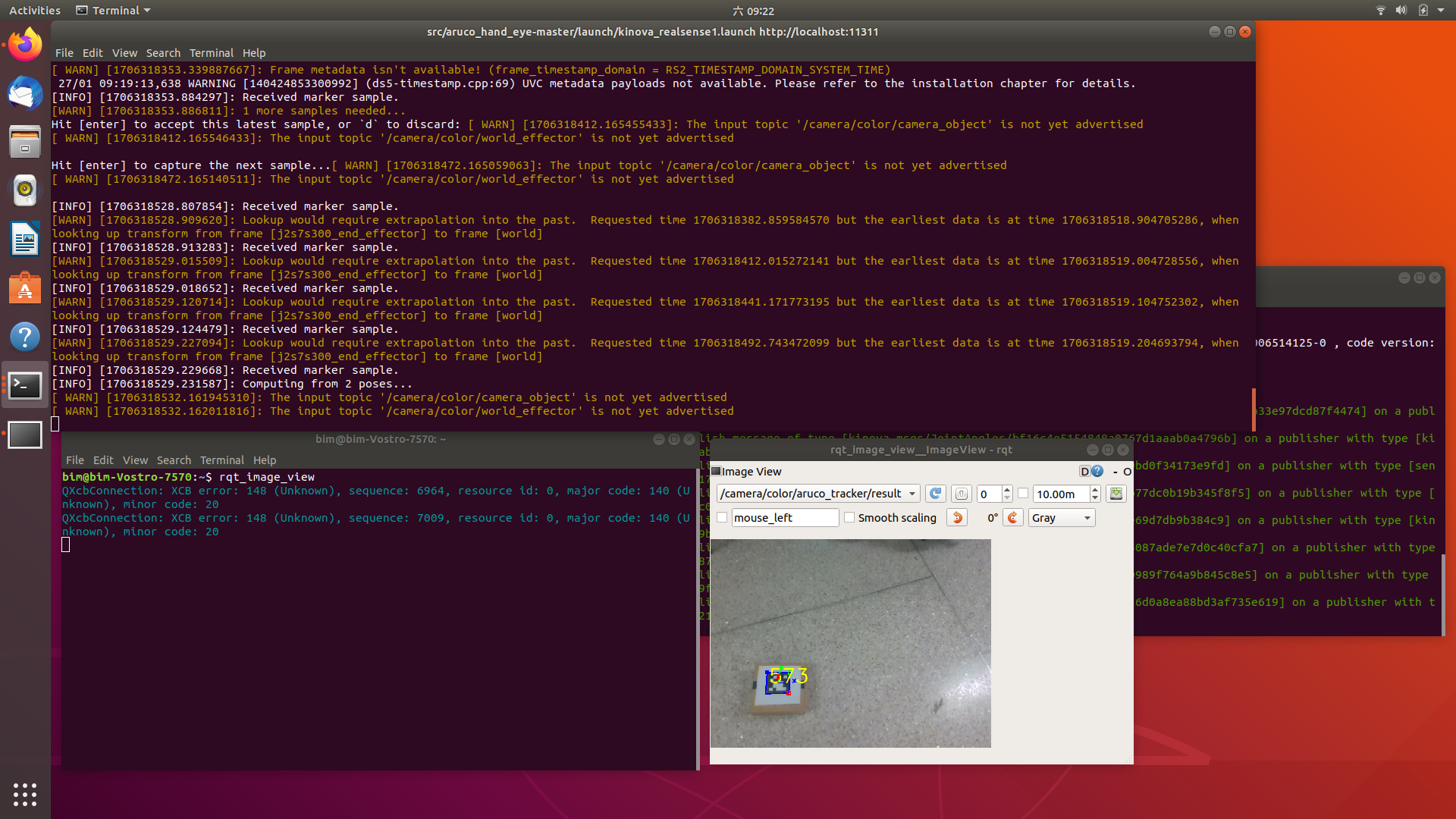
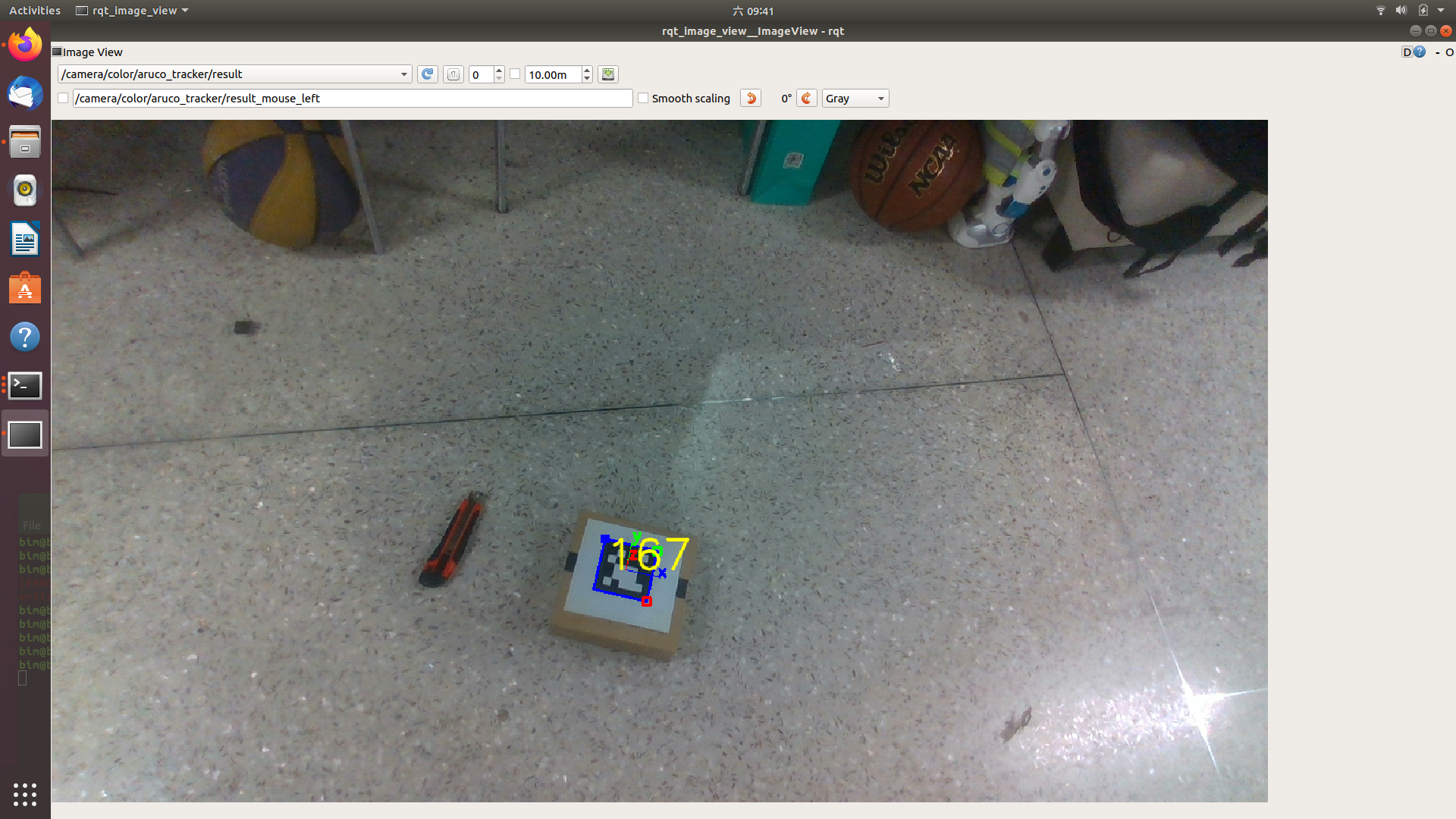
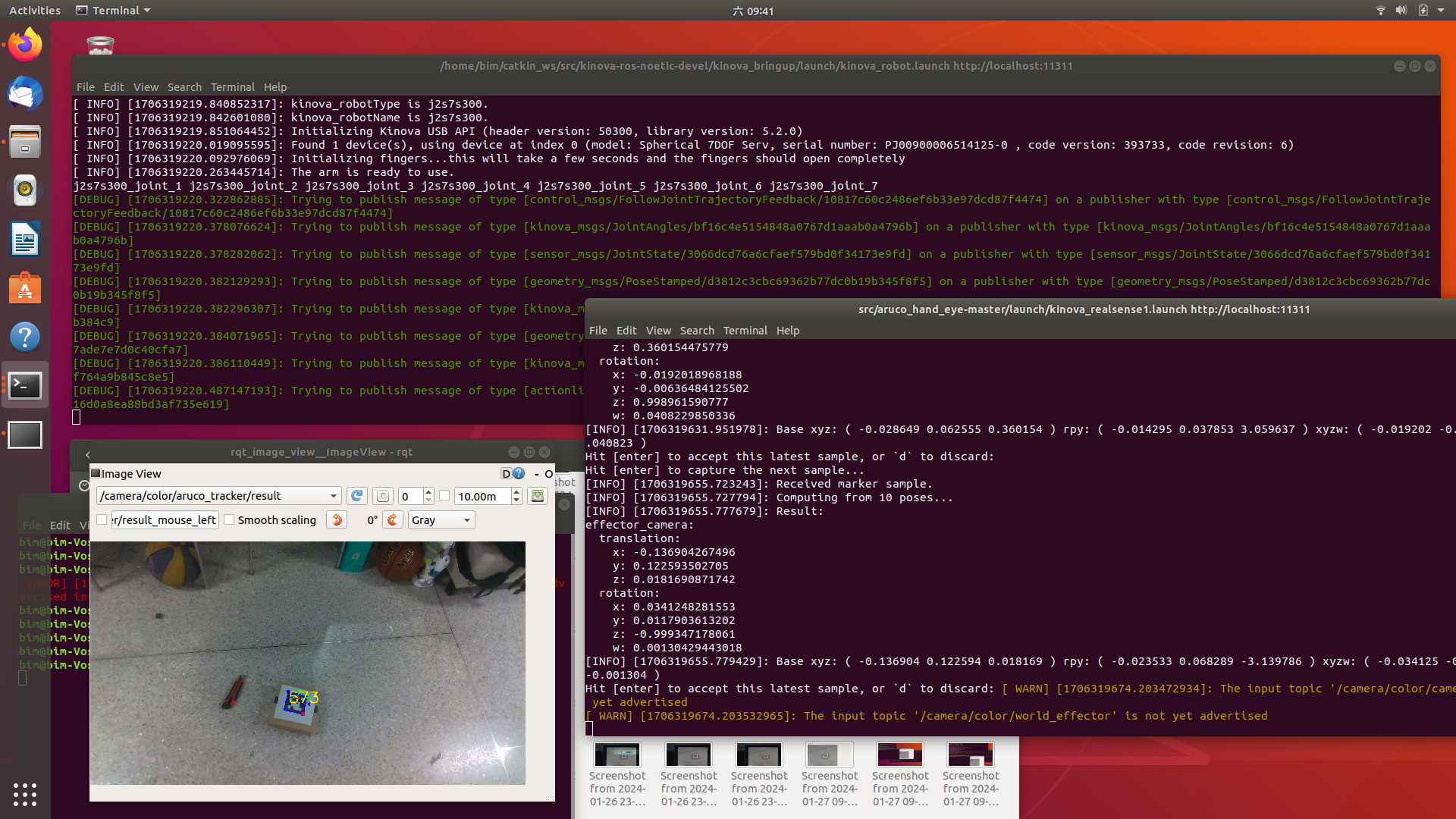
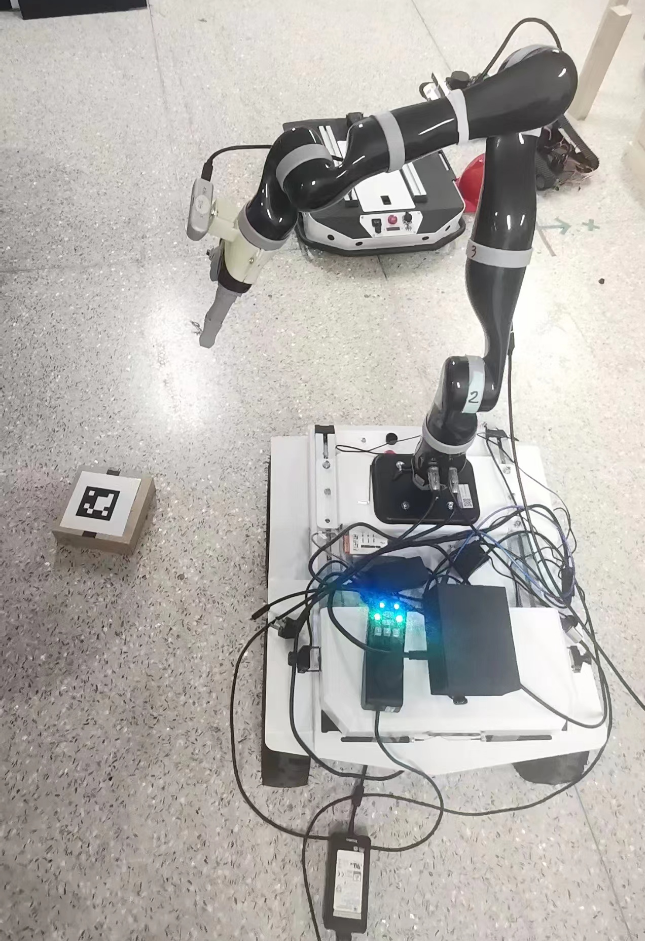
https://blog.csdn.net/weixin_46489980/article/details/120552440
###########################

 浙公网安备 33010602011771号
浙公网安备 33010602011771号