创建ROS工作空间
创建ROS工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ catkin_make Base path: /home/bim/catkin_ws Source space: /home/bim/catkin_ws/src Build space: /home/bim/catkin_ws/build Devel space: /home/bim/catkin_ws/devel Install space: /home/bim/catkin_ws/install Creating symlink "/home/bim/catkin_ws/src/CMakeLists.txt" pointing to "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake" #### #### Running command: "cmake /home/bim/catkin_ws/src -DCATKIN_DEVEL_PREFIX=/home/bim/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/bim/catkin_ws/install -G Unix Makefiles" in "/home/bim/catkin_ws/build" #### -- The C compiler identification is GNU 7.5.0 -- The CXX compiler identification is GNU 7.5.0 -- Check for working C compiler: /usr/bin/cc -- Check for working C compiler: /usr/bin/cc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Detecting C compile features -- Detecting C compile features - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Detecting CXX compile features -- Detecting CXX compile features - done -- Using CATKIN_DEVEL_PREFIX: /home/bim/catkin_ws/devel -- Using CMAKE_PREFIX_PATH: /opt/ros/melodic -- This workspace overlays: /opt/ros/melodic -- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2") -- Using PYTHON_EXECUTABLE: /usr/bin/python2 -- Using Debian Python package layout -- Using empy: /usr/bin/empy -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /home/bim/catkin_ws/build/test_results -- Found gtest sources under '/usr/src/googletest': gtests will be built -- Found gmock sources under '/usr/src/googletest': gmock will be built -- Found PythonInterp: /usr/bin/python2 (found version "2.7.17") -- Looking for pthread.h -- Looking for pthread.h - found -- Looking for pthread_create -- Looking for pthread_create - not found -- Looking for pthread_create in pthreads -- Looking for pthread_create in pthreads - not found -- Looking for pthread_create in pthread -- Looking for pthread_create in pthread - found -- Found Threads: TRUE -- Using Python nosetests: /usr/bin/nosetests-2.7 -- catkin 0.7.29 -- BUILD_SHARED_LIBS is on -- BUILD_SHARED_LIBS is on -- Configuring done -- Generating done -- Build files have been written to: /home/bim/catkin_ws/build #### #### Running command: "make -j8 -l8" in "/home/bim/catkin_ws/build" #### bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
source devel/setup.bash
echo $ROS_PACKAGE_PATH
bim@bim-Vostro-7570:~/catkin_ws$ echo $ROS_PACKAGE_PATH /home/bim/catkin_ws/src:/opt/ros/melodic/share bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
realsense-ros /src/
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ catkin_make Base path: /home/bim/catkin_ws Source space: /home/bim/catkin_ws/src Build space: /home/bim/catkin_ws/build Devel space: /home/bim/catkin_ws/devel Install space: /home/bim/catkin_ws/install #### #### Running command: "cmake /home/bim/catkin_ws/src -DCATKIN_DEVEL_PREFIX=/home/bim/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/bim/catkin_ws/install -G Unix Makefiles" in "/home/bim/catkin_ws/build" #### -- Using CATKIN_DEVEL_PREFIX: /home/bim/catkin_ws/devel -- Using CMAKE_PREFIX_PATH: /opt/ros/melodic -- This workspace overlays: /opt/ros/melodic -- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2") -- Using PYTHON_EXECUTABLE: /usr/bin/python2 -- Using Debian Python package layout -- Using empy: /usr/bin/empy -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /home/bim/catkin_ws/build/test_results -- Found gtest sources under '/usr/src/googletest': gtests will be built -- Found gmock sources under '/usr/src/googletest': gmock will be built -- Found PythonInterp: /usr/bin/python2 (found version "2.7.17") -- Using Python nosetests: /usr/bin/nosetests-2.7 -- catkin 0.7.29 -- BUILD_SHARED_LIBS is on -- BUILD_SHARED_LIBS is on -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- ~~ traversing 3 packages in topological order: -- ~~ - realsense2_description -- ~~ - ddynamic_reconfigure -- ~~ - realsense2_camera -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- +++ processing catkin package: 'realsense2_description' -- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_description) -- +++ processing catkin package: 'ddynamic_reconfigure' -- ==> add_subdirectory(ddynamic_reconfigure-0.4.1) -- +++ processing catkin package: 'realsense2_camera' -- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_camera) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- Create Release Build. -- realsense2_camera: 3 messages, 1 services -- Configuring done -- Generating done -- Build files have been written to: /home/bim/catkin_ws/build #### #### Running command: "make -j8 -l8" in "/home/bim/catkin_ws/build" #### Scanning dependencies of target roscpp_generate_messages_nodejs Scanning dependencies of target _catkin_empty_exported_target Scanning dependencies of target ddynamic_reconfigure Scanning dependencies of target roscpp_generate_messages_lisp Scanning dependencies of target std_msgs_generate_messages_py Scanning dependencies of target roscpp_generate_messages_eus Scanning dependencies of target bond_generate_messages_eus Scanning dependencies of target std_msgs_generate_messages_nodejs [ 0%] Built target bond_generate_messages_eus [ 0%] Built target roscpp_generate_messages_lisp [ 0%] Built target roscpp_generate_messages_eus [ 0%] Built target std_msgs_generate_messages_nodejs [ 0%] Built target roscpp_generate_messages_nodejs [ 0%] Built target std_msgs_generate_messages_py [ 0%] Built target _catkin_empty_exported_target Scanning dependencies of target dynamic_reconfigure_generate_messages_py Scanning dependencies of target rosgraph_msgs_generate_messages_py Scanning dependencies of target dynamic_reconfigure_generate_messages_nodejs Scanning dependencies of target std_msgs_generate_messages_cpp Scanning dependencies of target std_msgs_generate_messages_eus Scanning dependencies of target roscpp_generate_messages_py Scanning dependencies of target dynamic_reconfigure_generate_messages_eus [ 0%] Built target dynamic_reconfigure_generate_messages_nodejs [ 0%] Built target dynamic_reconfigure_generate_messages_py [ 2%] Building CXX object ddynamic_reconfigure-0.4.1/CMakeFiles/ddynamic_reconfigure.dir/src/ddynamic_reconfigure.cpp.o [ 2%] Built target std_msgs_generate_messages_cpp [ 2%] Built target rosgraph_msgs_generate_messages_py [ 2%] Built target roscpp_generate_messages_py [ 2%] Built target std_msgs_generate_messages_eus [ 2%] Built target dynamic_reconfigure_generate_messages_eus Scanning dependencies of target rosgraph_msgs_generate_messages_cpp Scanning dependencies of target dynamic_reconfigure_generate_messages_cpp Scanning dependencies of target rosgraph_msgs_generate_messages_eus Scanning dependencies of target dynamic_reconfigure_generate_messages_lisp Scanning dependencies of target rosgraph_msgs_generate_messages_lisp Scanning dependencies of target dynamic_reconfigure_gencfg [ 2%] Built target dynamic_reconfigure_generate_messages_cpp Scanning dependencies of target std_msgs_generate_messages_lisp [ 2%] Built target rosgraph_msgs_generate_messages_cpp [ 2%] Built target rosgraph_msgs_generate_messages_eus [ 2%] Built target dynamic_reconfigure_generate_messages_lisp [ 2%] Built target rosgraph_msgs_generate_messages_lisp [ 2%] Built target dynamic_reconfigure_gencfg Scanning dependencies of target rosgraph_msgs_generate_messages_nodejs [ 2%] Built target std_msgs_generate_messages_lisp Scanning dependencies of target roscpp_generate_messages_cpp Scanning dependencies of target diagnostic_msgs_generate_messages_lisp Scanning dependencies of target diagnostic_msgs_generate_messages_nodejs Scanning dependencies of target diagnostic_msgs_generate_messages_eus Scanning dependencies of target tf2_msgs_generate_messages_nodejs [ 2%] Built target rosgraph_msgs_generate_messages_nodejs [ 2%] Built target roscpp_generate_messages_cpp Scanning dependencies of target tf2_msgs_generate_messages_py [ 2%] Built target diagnostic_msgs_generate_messages_lisp [ 2%] Built target diagnostic_msgs_generate_messages_eus [ 2%] Built target diagnostic_msgs_generate_messages_nodejs [ 2%] Built target tf2_msgs_generate_messages_nodejs Scanning dependencies of target tf2_msgs_generate_messages_lisp Scanning dependencies of target tf2_msgs_generate_messages_eus [ 2%] Built target tf2_msgs_generate_messages_py Scanning dependencies of target tf2_msgs_generate_messages_cpp Scanning dependencies of target actionlib_generate_messages_nodejs Scanning dependencies of target actionlib_generate_messages_py [ 2%] Built target tf2_msgs_generate_messages_lisp Scanning dependencies of target actionlib_generate_messages_eus [ 2%] Built target tf2_msgs_generate_messages_eus Scanning dependencies of target tf_generate_messages_nodejs [ 2%] Built target tf2_msgs_generate_messages_cpp [ 2%] Built target actionlib_generate_messages_py [ 2%] Built target actionlib_generate_messages_nodejs Scanning dependencies of target tf_generate_messages_lisp Scanning dependencies of target actionlib_msgs_generate_messages_py [ 2%] Built target actionlib_generate_messages_eus [ 2%] Built target tf_generate_messages_nodejs Scanning dependencies of target bond_generate_messages_lisp Scanning dependencies of target _realsense2_camera_generate_messages_check_deps_IMUInfo Scanning dependencies of target _realsense2_camera_generate_messages_check_deps_Extrinsics [ 2%] Built target tf_generate_messages_lisp Scanning dependencies of target _realsense2_camera_generate_messages_check_deps_Metadata Scanning dependencies of target _realsense2_camera_generate_messages_check_deps_DeviceInfo [ 2%] Built target actionlib_msgs_generate_messages_py [ 2%] Built target bond_generate_messages_lisp Scanning dependencies of target sensor_msgs_generate_messages_cpp Scanning dependencies of target actionlib_msgs_generate_messages_nodejs Scanning dependencies of target diagnostic_msgs_generate_messages_cpp [ 2%] Built target sensor_msgs_generate_messages_cpp [ 2%] Built target actionlib_msgs_generate_messages_nodejs [ 2%] Built target _realsense2_camera_generate_messages_check_deps_IMUInfo Scanning dependencies of target actionlib_msgs_generate_messages_lisp [ 2%] Built target _realsense2_camera_generate_messages_check_deps_Extrinsics [ 2%] Built target diagnostic_msgs_generate_messages_cpp [ 2%] Built target _realsense2_camera_generate_messages_check_deps_DeviceInfo [ 2%] Built target _realsense2_camera_generate_messages_check_deps_Metadata Scanning dependencies of target geometry_msgs_generate_messages_nodejs Scanning dependencies of target geometry_msgs_generate_messages_py [ 2%] Built target actionlib_msgs_generate_messages_lisp Scanning dependencies of target nav_msgs_generate_messages_lisp Scanning dependencies of target actionlib_msgs_generate_messages_eus Scanning dependencies of target sensor_msgs_generate_messages_eus Scanning dependencies of target nodelet_generate_messages_lisp [ 2%] Built target geometry_msgs_generate_messages_nodejs [ 2%] Built target geometry_msgs_generate_messages_py Scanning dependencies of target tf_generate_messages_cpp [ 2%] Built target sensor_msgs_generate_messages_eus [ 2%] Built target nodelet_generate_messages_lisp [ 2%] Built target actionlib_msgs_generate_messages_eus [ 2%] Built target nav_msgs_generate_messages_lisp Scanning dependencies of target geometry_msgs_generate_messages_eus Scanning dependencies of target nav_msgs_generate_messages_eus [ 2%] Built target tf_generate_messages_cpp Scanning dependencies of target nav_msgs_generate_messages_nodejs Scanning dependencies of target actionlib_msgs_generate_messages_cpp Scanning dependencies of target std_srvs_generate_messages_cpp Scanning dependencies of target nav_msgs_generate_messages_py [ 2%] Built target geometry_msgs_generate_messages_eus [ 2%] Built target nav_msgs_generate_messages_nodejs [ 2%] Built target nav_msgs_generate_messages_eus Scanning dependencies of target std_srvs_generate_messages_lisp [ 2%] Built target actionlib_msgs_generate_messages_cpp [ 2%] Built target std_srvs_generate_messages_cpp [ 2%] Built target nav_msgs_generate_messages_py Scanning dependencies of target tf_generate_messages_eus Scanning dependencies of target nav_msgs_generate_messages_cpp [ 2%] Built target std_srvs_generate_messages_lisp Scanning dependencies of target bond_generate_messages_cpp Scanning dependencies of target geometry_msgs_generate_messages_lisp Scanning dependencies of target geometry_msgs_generate_messages_cpp Scanning dependencies of target std_srvs_generate_messages_eus [ 2%] Built target tf_generate_messages_eus Scanning dependencies of target sensor_msgs_generate_messages_lisp [ 2%] Built target nav_msgs_generate_messages_cpp [ 2%] Built target bond_generate_messages_cpp [ 2%] Built target geometry_msgs_generate_messages_lisp [ 2%] Built target geometry_msgs_generate_messages_cpp [ 2%] Built target std_srvs_generate_messages_eus Scanning dependencies of target actionlib_generate_messages_cpp Scanning dependencies of target sensor_msgs_generate_messages_nodejs [ 2%] Built target sensor_msgs_generate_messages_lisp Scanning dependencies of target tf_generate_messages_py Scanning dependencies of target sensor_msgs_generate_messages_py Scanning dependencies of target std_srvs_generate_messages_py [ 2%] Built target sensor_msgs_generate_messages_nodejs Scanning dependencies of target actionlib_generate_messages_lisp [ 2%] Built target actionlib_generate_messages_cpp [ 2%] Built target tf_generate_messages_py [ 2%] Built target sensor_msgs_generate_messages_py Scanning dependencies of target std_srvs_generate_messages_nodejs [ 2%] Built target std_srvs_generate_messages_py Scanning dependencies of target bond_generate_messages_py Scanning dependencies of target nodelet_generate_messages_cpp [ 2%] Built target actionlib_generate_messages_lisp Scanning dependencies of target diagnostic_msgs_generate_messages_py Scanning dependencies of target nodelet_generate_messages_eus [ 2%] Built target std_srvs_generate_messages_nodejs Scanning dependencies of target nodelet_generate_messages_nodejs [ 2%] Built target bond_generate_messages_py Scanning dependencies of target nodelet_generate_messages_py [ 2%] Built target nodelet_generate_messages_cpp [ 2%] Built target nodelet_generate_messages_eus Scanning dependencies of target bond_generate_messages_nodejs [ 2%] Built target nodelet_generate_messages_nodejs [ 2%] Built target diagnostic_msgs_generate_messages_py Scanning dependencies of target realsense2_camera_generate_messages_lisp [ 2%] Built target nodelet_generate_messages_py Scanning dependencies of target realsense2_camera_generate_messages_nodejs [ 2%] Built target bond_generate_messages_nodejs Scanning dependencies of target realsense2_camera_generate_messages_eus Scanning dependencies of target realsense2_camera_generate_messages_cpp Scanning dependencies of target realsense2_camera_generate_messages_py [ 5%] Generating Lisp code from realsense2_camera/Metadata.msg [ 8%] Generating Lisp code from realsense2_camera/IMUInfo.msg [ 11%] Generating Javascript code from realsense2_camera/IMUInfo.msg [ 14%] Generating Javascript code from realsense2_camera/Metadata.msg [ 17%] Generating EusLisp code from realsense2_camera/IMUInfo.msg [ 20%] Generating C++ code from realsense2_camera/IMUInfo.msg [ 22%] Generating Python from MSG realsense2_camera/IMUInfo [ 28%] Generating Lisp code from realsense2_camera/Extrinsics.msg [ 28%] Generating Python from MSG realsense2_camera/Metadata [ 31%] Generating C++ code from realsense2_camera/Metadata.msg [ 34%] Generating Javascript code from realsense2_camera/Extrinsics.msg [ 37%] Generating EusLisp code from realsense2_camera/Metadata.msg [ 40%] Generating Lisp code from realsense2_camera/DeviceInfo.srv [ 42%] Generating Javascript code from realsense2_camera/DeviceInfo.srv [ 42%] Built target realsense2_camera_generate_messages_lisp [ 45%] Generating EusLisp code from realsense2_camera/Extrinsics.msg [ 45%] Built target realsense2_camera_generate_messages_nodejs [ 48%] Generating EusLisp code from realsense2_camera/DeviceInfo.srv [ 51%] Generating C++ code from realsense2_camera/Extrinsics.msg [ 54%] Generating EusLisp manifest code for realsense2_camera [ 57%] Generating C++ code from realsense2_camera/DeviceInfo.srv [ 60%] Generating Python code from SRV realsense2_camera/DeviceInfo [ 62%] Generating Python from MSG realsense2_camera/Extrinsics [ 65%] Generating Python msg __init__.py for realsense2_camera [ 68%] Generating Python srv __init__.py for realsense2_camera [ 68%] Built target realsense2_camera_generate_messages_cpp [ 68%] Built target realsense2_camera_generate_messages_py [ 68%] Built target realsense2_camera_generate_messages_eus Scanning dependencies of target realsense2_camera_generate_messages [ 68%] Built target realsense2_camera_generate_messages [ 71%] Linking CXX shared library /home/bim/catkin_ws/devel/lib/libddynamic_reconfigure.so [ 71%] Built target ddynamic_reconfigure Scanning dependencies of target ddynamic_reconfigure_auto_update_test Scanning dependencies of target test_bool_dynamic_reconfigure_server Scanning dependencies of target fake_dynamic_reconfigure_server Scanning dependencies of target realsense2_camera [ 77%] Building CXX object ddynamic_reconfigure-0.4.1/CMakeFiles/test_bool_dynamic_reconfigure_server.dir/test/test_bool_dynamic_reconfigure_server.cpp.o [ 80%] Building CXX object ddynamic_reconfigure-0.4.1/CMakeFiles/ddynamic_reconfigure_auto_update_test.dir/test/ddynamic_reconfigure_auto_update_test.cpp.o [ 80%] Building CXX object ddynamic_reconfigure-0.4.1/CMakeFiles/fake_dynamic_reconfigure_server.dir/test/fake_dynamic_reconfigure_server.cpp.o [ 85%] Building CXX object realsense-ros-2.3.2/realsense2_camera/CMakeFiles/realsense2_camera.dir/src/base_realsense_node.cpp.o [ 85%] Building CXX object realsense-ros-2.3.2/realsense2_camera/CMakeFiles/realsense2_camera.dir/src/realsense_node_factory.cpp.o [ 88%] Building CXX object realsense-ros-2.3.2/realsense2_camera/CMakeFiles/realsense2_camera.dir/src/t265_realsense_node.cpp.o [ 91%] Linking CXX executable /home/bim/catkin_ws/devel/lib/ddynamic_reconfigure/ddynamic_reconfigure_auto_update_test [ 94%] Linking CXX executable /home/bim/catkin_ws/devel/lib/ddynamic_reconfigure/test_bool_dynamic_reconfigure_server [ 94%] Built target ddynamic_reconfigure_auto_update_test [ 94%] Built target test_bool_dynamic_reconfigure_server [ 97%] Linking CXX executable /home/bim/catkin_ws/devel/lib/ddynamic_reconfigure/fake_dynamic_reconfigure_server [ 97%] Built target fake_dynamic_reconfigure_server [100%] Linking CXX shared library /home/bim/catkin_ws/devel/lib/librealsense2_camera.so [100%] Built target realsense2_camera bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ source devel/setup.bash
bim@bim-Vostro-7570:~/catkin_ws$
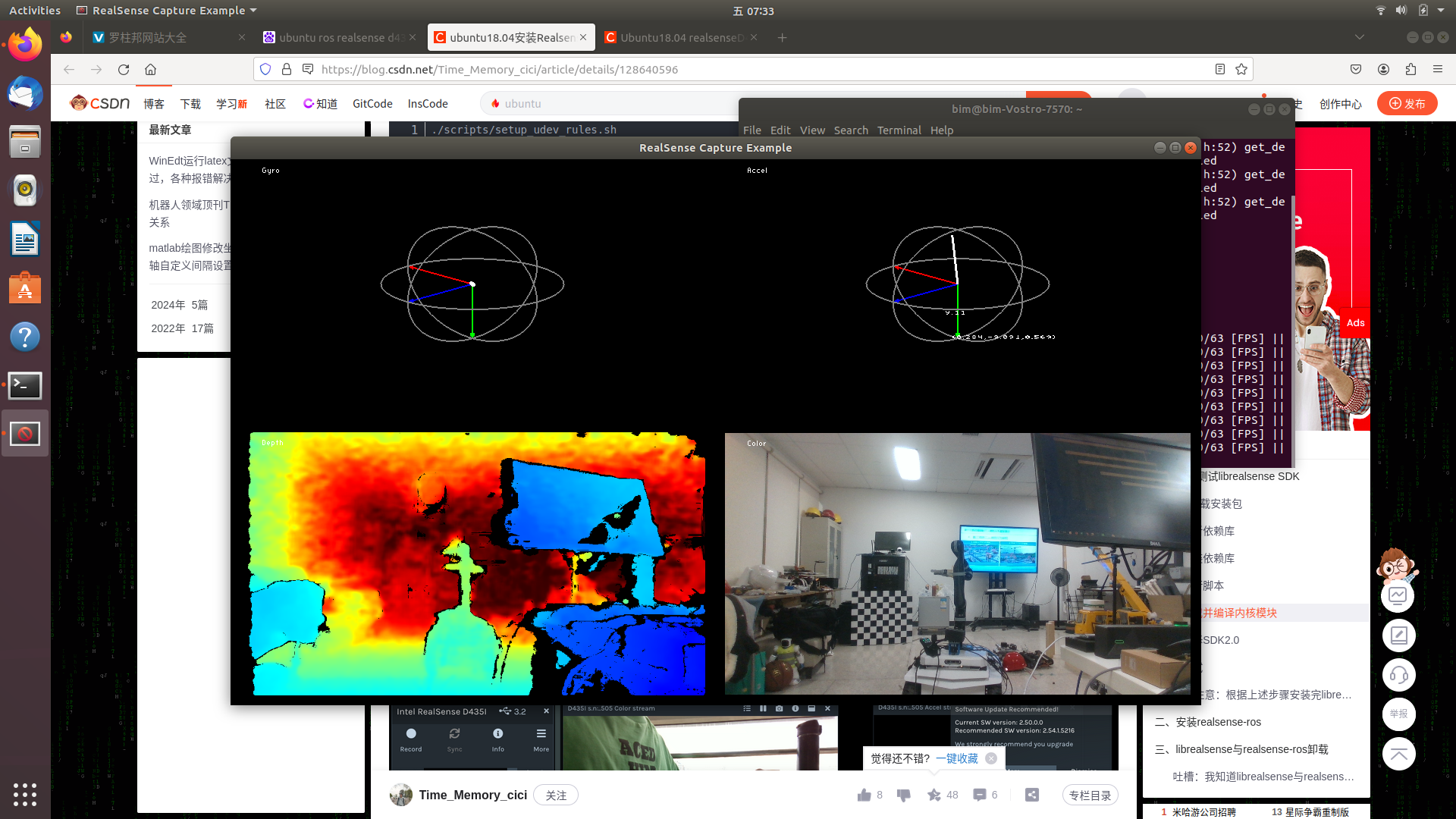
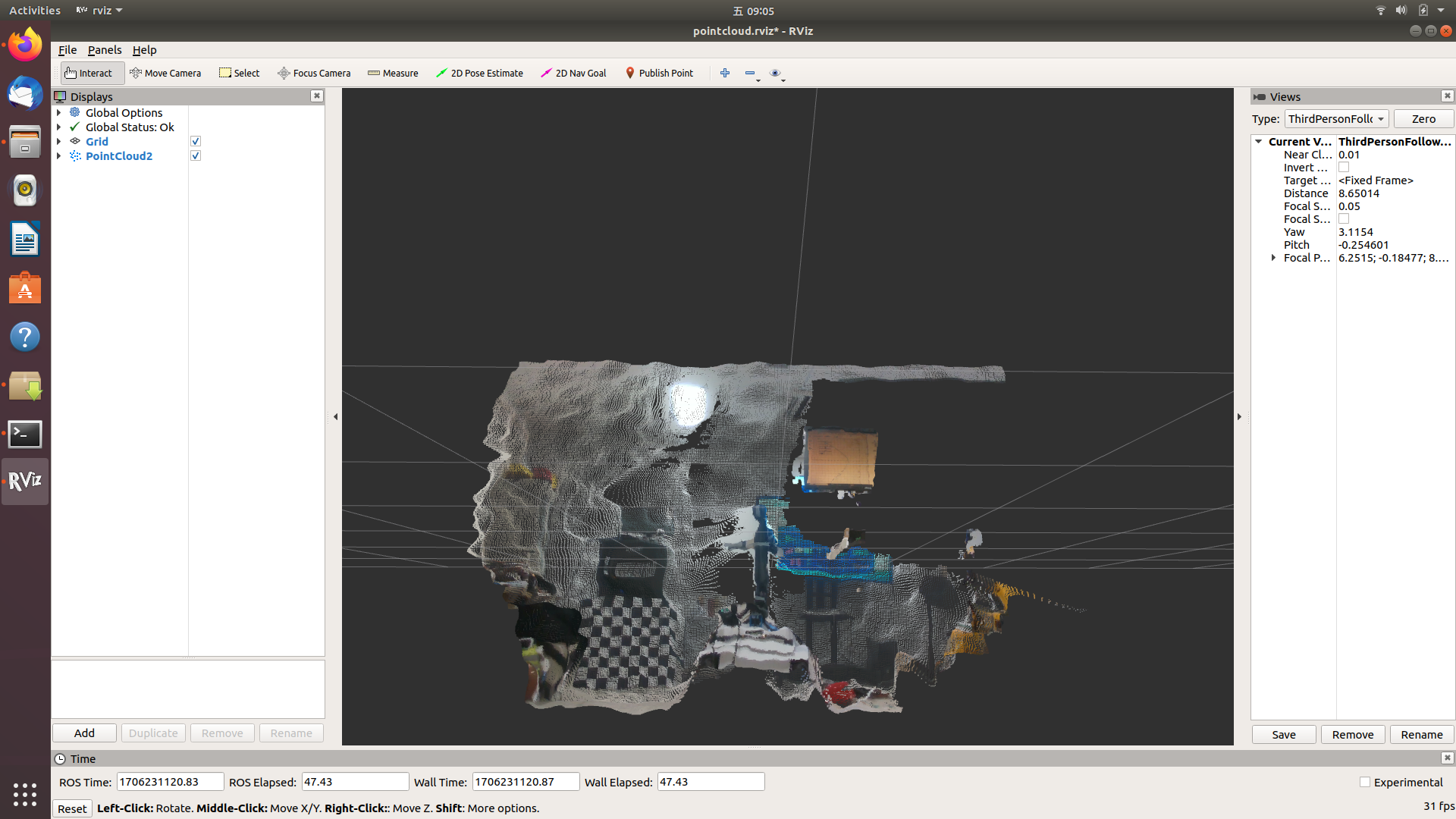
roslaunch realsense2_camera demo_pointcloud.launch
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ roslaunch realsense2_camera demo_pointcloud.launch
... logging to /home/bim/.ros/log/dc668b8a-bbe6-11ee-a111-e470b83aa6e2/roslaunch-bim-Vostro-7570-3909.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://bim-Vostro-7570:42851/
SUMMARY
========
PARAMETERS
* /camera/realsense2_camera/accel_fps: 0
* /camera/realsense2_camera/accel_frame_id: camera_accel_frame
* /camera/realsense2_camera/accel_optical_frame_id: camera_accel_opti...
* /camera/realsense2_camera/align_depth: False
* /camera/realsense2_camera/aligned_depth_to_color_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye1_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye2_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_infra1_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_infra2_frame_id: camera_aligned_de...
* /camera/realsense2_camera/allow_no_texture_points: False
* /camera/realsense2_camera/base_frame_id: camera_link
* /camera/realsense2_camera/calib_odom_file:
* /camera/realsense2_camera/clip_distance: -1.0
* /camera/realsense2_camera/color_fps: 30
* /camera/realsense2_camera/color_frame_id: camera_color_frame
* /camera/realsense2_camera/color_height: 480
* /camera/realsense2_camera/color_optical_frame_id: camera_color_opti...
* /camera/realsense2_camera/color_width: 640
* /camera/realsense2_camera/confidence_fps: 30
* /camera/realsense2_camera/confidence_height: 480
* /camera/realsense2_camera/confidence_width: 640
* /camera/realsense2_camera/depth_fps: 30
* /camera/realsense2_camera/depth_frame_id: camera_depth_frame
* /camera/realsense2_camera/depth_height: 480
* /camera/realsense2_camera/depth_optical_frame_id: camera_depth_opti...
* /camera/realsense2_camera/depth_width: 640
* /camera/realsense2_camera/device_type:
* /camera/realsense2_camera/enable_accel: False
* /camera/realsense2_camera/enable_color: True
* /camera/realsense2_camera/enable_confidence: True
* /camera/realsense2_camera/enable_depth: True
* /camera/realsense2_camera/enable_fisheye1: False
* /camera/realsense2_camera/enable_fisheye2: False
* /camera/realsense2_camera/enable_fisheye: False
* /camera/realsense2_camera/enable_gyro: False
* /camera/realsense2_camera/enable_infra1: False
* /camera/realsense2_camera/enable_infra2: False
* /camera/realsense2_camera/enable_infra: False
* /camera/realsense2_camera/enable_pointcloud: True
* /camera/realsense2_camera/enable_pose: False
* /camera/realsense2_camera/enable_sync: True
* /camera/realsense2_camera/filters:
* /camera/realsense2_camera/fisheye1_frame_id: camera_fisheye1_f...
* /camera/realsense2_camera/fisheye1_optical_frame_id: camera_fisheye1_o...
* /camera/realsense2_camera/fisheye2_frame_id: camera_fisheye2_f...
* /camera/realsense2_camera/fisheye2_optical_frame_id: camera_fisheye2_o...
* /camera/realsense2_camera/fisheye_fps: 30
* /camera/realsense2_camera/fisheye_frame_id: camera_fisheye_frame
* /camera/realsense2_camera/fisheye_height: 0
* /camera/realsense2_camera/fisheye_optical_frame_id: camera_fisheye_op...
* /camera/realsense2_camera/fisheye_width: 0
* /camera/realsense2_camera/gyro_fps: 0
* /camera/realsense2_camera/gyro_frame_id: camera_gyro_frame
* /camera/realsense2_camera/gyro_optical_frame_id: camera_gyro_optic...
* /camera/realsense2_camera/imu_optical_frame_id: camera_imu_optica...
* /camera/realsense2_camera/infra1_frame_id: camera_infra1_frame
* /camera/realsense2_camera/infra1_optical_frame_id: camera_infra1_opt...
* /camera/realsense2_camera/infra2_frame_id: camera_infra2_frame
* /camera/realsense2_camera/infra2_optical_frame_id: camera_infra2_opt...
* /camera/realsense2_camera/infra_fps: 30
* /camera/realsense2_camera/infra_height: 480
* /camera/realsense2_camera/infra_rgb: False
* /camera/realsense2_camera/infra_width: 640
* /camera/realsense2_camera/initial_reset: False
* /camera/realsense2_camera/json_file_path:
* /camera/realsense2_camera/linear_accel_cov: 0.01
* /camera/realsense2_camera/odom_frame_id: camera_odom_frame
* /camera/realsense2_camera/ordered_pc: False
* /camera/realsense2_camera/pointcloud_texture_index: 0
* /camera/realsense2_camera/pointcloud_texture_stream: RS2_STREAM_COLOR
* /camera/realsense2_camera/pose_frame_id: camera_pose_frame
* /camera/realsense2_camera/pose_optical_frame_id: camera_pose_optic...
* /camera/realsense2_camera/publish_odom_tf: True
* /camera/realsense2_camera/publish_tf: True
* /camera/realsense2_camera/reconnect_timeout: 6.0
* /camera/realsense2_camera/rosbag_filename:
* /camera/realsense2_camera/serial_no:
* /camera/realsense2_camera/stereo_module/exposure/1: 7500
* /camera/realsense2_camera/stereo_module/exposure/2: 1
* /camera/realsense2_camera/stereo_module/gain/1: 16
* /camera/realsense2_camera/stereo_module/gain/2: 16
* /camera/realsense2_camera/tf_publish_rate: 0.0
* /camera/realsense2_camera/topic_odom_in: camera/odom_in
* /camera/realsense2_camera/unite_imu_method: none
* /camera/realsense2_camera/usb_port_id:
* /camera/realsense2_camera/wait_for_device_timeout: -1.0
* /rosdistro: melodic
* /rosversion: 1.14.13
NODES
/camera/
realsense2_camera (nodelet/nodelet)
realsense2_camera_manager (nodelet/nodelet)
rviz (rviz/rviz)
auto-starting new master
process[master]: started with pid [3925]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to dc668b8a-bbe6-11ee-a111-e470b83aa6e2
process[rosout-1]: started with pid [3938]
started core service [/rosout]
process[camera/realsense2_camera_manager-2]: started with pid [3955]
process[camera/realsense2_camera-3]: started with pid [3956]
process[camera/rviz-4]: started with pid [3957]
[ INFO] [1706231072.343765512]: Initializing nodelet with 8 worker threads.
[ INFO] [1706231072.895690235]: RealSense ROS v2.3.2
[ INFO] [1706231072.895812521]: Built with LibRealSense v2.50.0
[ INFO] [1706231072.895909109]: Running with LibRealSense v2.50.0
[ INFO] [1706231072.960174362]:
[ INFO] [1706231072.968745609]: Device with serial number 943222071573 was found.
[ INFO] [1706231072.968800934]: Device with physical ID /sys/devices/pci0000:00/0000:00:14.0/usb2/2-1/2-1:1.0/video4linux/video0 was found.
[ INFO] [1706231072.968839179]: Device with name Intel RealSense D435I was found.
[ INFO] [1706231072.970002108]: Device with port number 2-1 was found.
[ INFO] [1706231072.970054351]: Device USB type: 3.2
[ INFO] [1706231072.973113587]: getParameters...
[ INFO] [1706231073.065456794]: setupDevice...
[ INFO] [1706231073.065509447]: JSON file is not provided
[ INFO] [1706231073.065534128]: ROS Node Namespace: camera
[ INFO] [1706231073.065559465]: Device Name: Intel RealSense D435I
[ INFO] [1706231073.065582258]: Device Serial No: 943222071573
[ INFO] [1706231073.065607835]: Device physical port: /sys/devices/pci0000:00/0000:00:14.0/usb2/2-1/2-1:1.0/video4linux/video0
[ INFO] [1706231073.065629109]: Device FW version: 05.15.01.00
[ INFO] [1706231073.065650151]: Device Product ID: 0x0B3A
[ INFO] [1706231073.065670349]: Enable PointCloud: On
[ INFO] [1706231073.065725123]: Align Depth: Off
[ INFO] [1706231073.065744799]: Sync Mode: On
[ INFO] [1706231073.065807421]: Device Sensors:
[ INFO] [1706231073.070912580]: Stereo Module was found.
26/01 09:04:33,071 WARNING [139819683608320] (backend-v4l2.cpp:1387) Pixel format 36315752-1a66-a242-9065-d01814a likely requires patch for fourcc code RW16!
[ INFO] [1706231073.083471976]: RGB Camera was found.
[ INFO] [1706231073.083723913]: Motion Module was found.
[ INFO] [1706231073.083799677]: (Confidence, 0) sensor isn't supported by current device! -- Skipping...
[ INFO] [1706231073.083904464]: Add Filter: pointcloud
[ INFO] [1706231073.084684731]: num_filters: 1
[ INFO] [1706231073.084713294]: Setting Dynamic reconfig parameters.
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
[ WARN] [1706231073.138940977]: Param '/camera/rgb_camera/power_line_frequency' has value 3 that is not in the enum { {50Hz: 1} {60Hz: 2} {Disabled: 0} }. Removing this parameter from dynamic reconfigure options.
[ INFO] [1706231073.159874524]: Done Setting Dynamic reconfig parameters.
[ INFO] [1706231073.161781046]: depth stream is enabled - width: 640, height: 480, fps: 30, Format: Z16
[ INFO] [1706231073.162327561]: color stream is enabled - width: 640, height: 480, fps: 30, Format: RGB8
[ INFO] [1706231073.162382298]: setupPublishers...
[ INFO] [1706231073.167388433]: Expected frequency for depth = 30.00000
[ INFO] [1706231073.221876139]: Expected frequency for color = 30.00000
[ INFO] [1706231073.251784267]: setupStreams...
[ INFO] [1706231073.264930195]: SELECTED BASE:Depth, 0
[ INFO] [1706231073.291431574]: RealSense Node Is Up!
[ WARN] [1706231073.387452043]: Frame metadata isn't available! (frame_timestamp_domain = RS2_TIMESTAMP_DOMAIN_SYSTEM_TIME)
26/01 09:04:33,384 WARNING [139819205359360] (ds5-timestamp.cpp:69) UVC metadata payloads not available. Please refer to the installation chapter for details.
[ INFO] [1706231073.394498127]: publishing unordered pointcloud.
[ WARN] [1706231073.517756262]: No stream match for pointcloud chosen texture Process - Color
26/01 09:04:33,709 WARNING [139819214370560] (ds5-timestamp.cpp:69) UVC metadata payloads not available. Please refer to the installation chapter for details.
================================================================================REQUIRED process [camera/rviz-4] has died!
process has finished cleanly
log file: /home/bim/.ros/log/dc668b8a-bbe6-11ee-a111-e470b83aa6e2/camera-rviz-4*.log
Initiating shutdown!
================================================================================
[camera/rviz-4] killing on exit
[camera/realsense2_camera-3] killing on exit
[camera/realsense2_camera_manager-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
=======================================================================
sudo apt-get install aptitude
sudo aptitude install ros-melodic-simulators ros-melodic-urdf-sim-tutorial
sudo apt-get install ros-melodic-desktop-full
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install aptitude
[sudo] password for bim:
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following package was automatically installed and is no longer required:
shim
Use 'sudo apt autoremove' to remove it.
The following additional packages will be installed:
aptitude-common libcwidget3v5 libsigc++-2.0-0v5
Suggested packages:
aptitude-doc-en | aptitude-doc apt-xapian-index debtags tasksel libcwidget-dev
The following NEW packages will be installed:
aptitude aptitude-common libcwidget3v5 libsigc++-2.0-0v5
0 upgraded, 4 newly installed, 0 to remove and 35 not upgraded.
Need to get 2,580 kB of archives.
After this operation, 10.9 MB of additional disk space will be used.
Do you want to continue? [Y/n] y
Get:1 http://mirrors.aliyun.com/ubuntu bionic/main amd64 aptitude-common all 0.8.10-6ubuntu1 [1,014 kB]
Get:2 http://mirrors.aliyun.com/ubuntu bionic/main amd64 libsigc++-2.0-0v5 amd64 2.10.0-2 [10.9 kB]
Get:3 http://mirrors.aliyun.com/ubuntu bionic/main amd64 libcwidget3v5 amd64 0.5.17-7 [286 kB]
Get:4 http://mirrors.aliyun.com/ubuntu bionic/main amd64 aptitude amd64 0.8.10-6ubuntu1 [1,269 kB]
Fetched 2,580 kB in 1s (1,882 kB/s)
Selecting previously unselected package aptitude-common.
(Reading database ... 249026 files and directories currently installed.)
Preparing to unpack .../aptitude-common_0.8.10-6ubuntu1_all.deb ...
Unpacking aptitude-common (0.8.10-6ubuntu1) ...
Selecting previously unselected package libsigc++-2.0-0v5:amd64.
Preparing to unpack .../libsigc++-2.0-0v5_2.10.0-2_amd64.deb ...
Unpacking libsigc++-2.0-0v5:amd64 (2.10.0-2) ...
Selecting previously unselected package libcwidget3v5:amd64.
Preparing to unpack .../libcwidget3v5_0.5.17-7_amd64.deb ...
Unpacking libcwidget3v5:amd64 (0.5.17-7) ...
Selecting previously unselected package aptitude.
Preparing to unpack .../aptitude_0.8.10-6ubuntu1_amd64.deb ...
Unpacking aptitude (0.8.10-6ubuntu1) ...
Setting up aptitude-common (0.8.10-6ubuntu1) ...
Setting up libsigc++-2.0-0v5:amd64 (2.10.0-2) ...
Setting up libcwidget3v5:amd64 (0.5.17-7) ...
Setting up aptitude (0.8.10-6ubuntu1) ...
update-alternatives: using /usr/bin/aptitude-curses to provide /usr/bin/aptitude (aptitude) in auto mode
Processing triggers for man-db (2.8.3-2ubuntu0.1) ...
Processing triggers for libc-bin (2.27-3ubuntu1.6) ...
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ sudo aptitude install ros-elodic-simulators ros-melodic-urdf-sim-tutorial
Couldn't find any package whose name or description matched "ros-elodic-simulators"
Unable to apply some actions, aborting
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ sudo aptitude install ros-melodic-simulators ros-melodic-urdf-sim-tutorial
ros-melodic-simulators is already installed at the requested version (1.4.1-0bionic.20230620.175233)
ros-melodic-urdf-sim-tutorial is already installed at the requested version (0.4.0-0bionic.20230524.160230)
ros-melodic-simulators is already installed at the requested version (1.4.1-0bionic.20230620.175233)
ros-melodic-urdf-sim-tutorial is already installed at the requested version (0.4.0-0bionic.20230524.160230)
The following packages will be REMOVED:
shim{u}
0 packages upgraded, 0 newly installed, 1 to remove and 35 not upgraded.
Need to get 0 B of archives. After unpacking 28.7 kB will be freed.
Do you want to continue? [Y/n/?] y
(Reading database ... 249164 files and directories currently installed.)
Removing shim (15.7-0ubuntu1) ...
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-desktop-full
Reading package lists... Done
Building dependency tree
Reading state information... Done
ros-melodic-desktop-full is already the newest version (1.4.1-0bionic.20230620.175308).
0 upgraded, 0 newly installed, 0 to remove and 35 not upgraded.
bim@bim-Vostro-7570:~/catkin_ws$
catkin_make
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ catkin_make
Base path: /home/bim/catkin_ws
Source space: /home/bim/catkin_ws/src
Build space: /home/bim/catkin_ws/build
Devel space: /home/bim/catkin_ws/devel
Install space: /home/bim/catkin_ws/install
####
#### Running command: "cmake /home/bim/catkin_ws/src -DCATKIN_DEVEL_PREFIX=/home/bim/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/bim/catkin_ws/install -G Unix Makefiles" in "/home/bim/catkin_ws/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/bim/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /home/bim/catkin_ws/devel;/opt/ros/melodic
-- This workspace overlays: /home/bim/catkin_ws/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/bim/catkin_ws/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 19 packages in topological order:
-- ~~ - kinova_bringup
-- ~~ - kinova_control
-- ~~ - kinova_gazebo
-- ~~ - realsense2_description
-- ~~ - ddynamic_reconfigure
-- ~~ - kinova_msgs
-- ~~ - kinova_driver
-- ~~ - kinova_arm_moveit_demo
-- ~~ - kinova_demo
-- ~~ - realsense2_camera
-- ~~ - j2n6s300_ikfast
-- ~~ - j2s6s300_ikfast
-- ~~ - j2s7s300_ikfast
-- ~~ - m1n6s300_ikfast
-- ~~ - kinova_description
-- ~~ - j2n6s300_moveit_config
-- ~~ - j2s6s300_moveit_config
-- ~~ - j2s7s300_moveit_config
-- ~~ - m1n6s300_moveit_config
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'kinova_bringup'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_bringup)
-- +++ processing catkin package: 'kinova_control'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_control)
-- +++ processing catkin package: 'kinova_gazebo'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_gazebo)
-- +++ processing catkin package: 'realsense2_description'
-- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_description)
-- +++ processing catkin package: 'ddynamic_reconfigure'
-- ==> add_subdirectory(ddynamic_reconfigure-0.4.1)
-- +++ processing catkin package: 'kinova_msgs'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_msgs)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Generating .msg files for action kinova_msgs/ArmJointAngles /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/ArmJointAngles.action
Generating for action ArmJointAngles
-- Generating .msg files for action kinova_msgs/ArmPose /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/ArmPose.action
Generating for action ArmPose
-- Generating .msg files for action kinova_msgs/Arm_KinovaPose /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/Arm_KinovaPose.action
Generating for action Arm_KinovaPose
-- Generating .msg files for action kinova_msgs/SetFingersPosition /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/SetFingersPosition.action
Generating for action SetFingersPosition
-- kinova_msgs: 37 messages, 12 services
-- +++ processing catkin package: 'kinova_driver'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_driver)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'kinova_arm_moveit_demo'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo)
-- Could NOT find moveit_core (missing: moveit_core_DIR)
-- Could not find the required component 'moveit_core'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "moveit_core" with
any of the following names:
moveit_coreConfig.cmake
moveit_core-config.cmake
Add the installation prefix of "moveit_core" to CMAKE_PREFIX_PATH or set
"moveit_core_DIR" to a directory containing one of the above files. If
"moveit_core" provides a separate development package or SDK, be sure it
has been installed.
Call Stack (most recent call first):
kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo/CMakeLists.txt:9 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/bim/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/bim/catkin_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
sudo apt-get install ros-melodic-moveit-visual-tools
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-moveit-visual-tools Reading package lists... Done Building dependency tree Reading state information... Done The following additional packages will be installed: libfcl-dev libfcl0.5 liboctomap-dev liboctomap1.8 libqt5x11extras5 libqt5x11extras5-dev ros-melodic-eigen-stl-containers ros-melodic-geometric-shapes ros-melodic-graph-msgs ros-melodic-moveit-core ros-melodic-moveit-msgs ros-melodic-moveit-ros-occupancy-map-monitor ros-melodic-moveit-ros-planning ros-melodic-object-recognition-msgs ros-melodic-octomap ros-melodic-octomap-msgs ros-melodic-pybind11-catkin ros-melodic-random-numbers ros-melodic-rviz-visual-tools ros-melodic-srdfdom The following NEW packages will be installed: libfcl-dev libfcl0.5 liboctomap-dev liboctomap1.8 libqt5x11extras5 libqt5x11extras5-dev ros-melodic-eigen-stl-containers ros-melodic-geometric-shapes ros-melodic-graph-msgs ros-melodic-moveit-core ros-melodic-moveit-msgs ros-melodic-moveit-ros-occupancy-map-monitor ros-melodic-moveit-ros-planning ros-melodic-moveit-visual-tools ros-melodic-object-recognition-msgs ros-melodic-octomap ros-melodic-octomap-msgs ros-melodic-pybind11-catkin ros-melodic-random-numbers ros-melodic-rviz-visual-tools ros-melodic-srdfdom 0 upgraded, 21 newly installed, 0 to remove and 35 not upgraded. Need to get 6,304 kB of archives. After this operation, 52.7 MB of additional disk space will be used. Do you want to continue? [Y/n] y Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-eigen-stl-containers amd64 0.1.8-0bionic.20201015.033045 [6,816 B] Get:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-octomap amd64 1.9.8-1bionic.20220514.014425 [191 kB] Get:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-random-numbers amd64 0.3.2-0bionic.20201015.065429 [28.0 kB] Get:4 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-geometric-shapes amd64 0.6.6-1bionic.20230415.003055 [87.0 kB] Get:5 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-graph-msgs amd64 0.1.0-1bionic.20221025.175948 [17.9 kB] Get:6 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-object-recognition-msgs amd64 0.4.1-0bionic.20221025.191441 [70.1 kB] Get:7 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-octomap-msgs amd64 0.3.5-1bionic.20221025.175926 [29.4 kB] Get:8 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-msgs amd64 0.10.1-1bionic.20221025.191657 [665 kB] Get:9 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-pybind11-catkin amd64 2.4.3-1bionic.20200731.225101 [118 kB] Get:10 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-srdfdom amd64 0.5.2-1bionic.20221025.185103 [60.5 kB] Get:11 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-core amd64 1.0.11-1bionic.20230524.160243 [1,195 kB] Get:12 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-occupancy-map-monitor amd64 1.0.11-1bionic.20230524.162139 [136 kB] Get:13 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-planning amd64 1.0.11-1bionic.20230524.163120 [788 kB] Get:14 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-rviz-visual-tools amd64 3.8.0-4bionic.20230330.130003 [1,432 kB] Get:15 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-visual-tools amd64 3.5.2-0bionic.20230524.164622 [284 kB] Get:16 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libfcl0.5 amd64 0.5.0-5 [902 kB] Get:17 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 liboctomap1.8 amd64 1.8.1+dfsg-1 [72.5 kB] Get:18 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 liboctomap-dev amd64 1.8.1+dfsg-1 [119 kB] Get:19 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libqt5x11extras5 amd64 5.9.5-0ubuntu1 [8,596 B] Get:20 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libqt5x11extras5-dev amd64 5.9.5-0ubuntu1 [7,236 B] Get:21 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libfcl-dev amd64 0.5.0-5 [88.6 kB] Fetched 6,304 kB in 3s (2,220 kB/s) Selecting previously unselected package libfcl0.5. (Reading database ... 249162 files and directories currently installed.) Preparing to unpack .../00-libfcl0.5_0.5.0-5_amd64.deb ... Unpacking libfcl0.5 (0.5.0-5) ... Selecting previously unselected package liboctomap1.8. Preparing to unpack .../01-liboctomap1.8_1.8.1+dfsg-1_amd64.deb ... Unpacking liboctomap1.8 (1.8.1+dfsg-1) ... Selecting previously unselected package liboctomap-dev. Preparing to unpack .../02-liboctomap-dev_1.8.1+dfsg-1_amd64.deb ... Unpacking liboctomap-dev (1.8.1+dfsg-1) ... Selecting previously unselected package libqt5x11extras5:amd64. Preparing to unpack .../03-libqt5x11extras5_5.9.5-0ubuntu1_amd64.deb ... Unpacking libqt5x11extras5:amd64 (5.9.5-0ubuntu1) ... Selecting previously unselected package libqt5x11extras5-dev:amd64. Preparing to unpack .../04-libqt5x11extras5-dev_5.9.5-0ubuntu1_amd64.deb ... Unpacking libqt5x11extras5-dev:amd64 (5.9.5-0ubuntu1) ... Selecting previously unselected package libfcl-dev. Preparing to unpack .../05-libfcl-dev_0.5.0-5_amd64.deb ... Unpacking libfcl-dev (0.5.0-5) ... Selecting previously unselected package ros-melodic-eigen-stl-containers. Preparing to unpack .../06-ros-melodic-eigen-stl-containers_0.1.8-0bionic.20201015.033045_amd64.deb ... Unpacking ros-melodic-eigen-stl-containers (0.1.8-0bionic.20201015.033045) ... Selecting previously unselected package ros-melodic-octomap. Preparing to unpack .../07-ros-melodic-octomap_1.9.8-1bionic.20220514.014425_amd64.deb ... Unpacking ros-melodic-octomap (1.9.8-1bionic.20220514.014425) ... Selecting previously unselected package ros-melodic-random-numbers. Preparing to unpack .../08-ros-melodic-random-numbers_0.3.2-0bionic.20201015.065429_amd64.deb ... Unpacking ros-melodic-random-numbers (0.3.2-0bionic.20201015.065429) ... Selecting previously unselected package ros-melodic-geometric-shapes. Preparing to unpack .../09-ros-melodic-geometric-shapes_0.6.6-1bionic.20230415.003055_amd64.deb ... Unpacking ros-melodic-geometric-shapes (0.6.6-1bionic.20230415.003055) ... Selecting previously unselected package ros-melodic-graph-msgs. Preparing to unpack .../10-ros-melodic-graph-msgs_0.1.0-1bionic.20221025.175948_amd64.deb ... Unpacking ros-melodic-graph-msgs (0.1.0-1bionic.20221025.175948) ... Selecting previously unselected package ros-melodic-object-recognition-msgs. Preparing to unpack .../11-ros-melodic-object-recognition-msgs_0.4.1-0bionic.20221025.191441_amd64.deb ... Unpacking ros-melodic-object-recognition-msgs (0.4.1-0bionic.20221025.191441) ... Selecting previously unselected package ros-melodic-octomap-msgs. Preparing to unpack .../12-ros-melodic-octomap-msgs_0.3.5-1bionic.20221025.175926_amd64.deb ... Unpacking ros-melodic-octomap-msgs (0.3.5-1bionic.20221025.175926) ... Selecting previously unselected package ros-melodic-moveit-msgs. Preparing to unpack .../13-ros-melodic-moveit-msgs_0.10.1-1bionic.20221025.191657_amd64.deb ... Unpacking ros-melodic-moveit-msgs (0.10.1-1bionic.20221025.191657) ... Selecting previously unselected package ros-melodic-pybind11-catkin. Preparing to unpack .../14-ros-melodic-pybind11-catkin_2.4.3-1bionic.20200731.225101_amd64.deb ... Unpacking ros-melodic-pybind11-catkin (2.4.3-1bionic.20200731.225101) ... Selecting previously unselected package ros-melodic-srdfdom. Preparing to unpack .../15-ros-melodic-srdfdom_0.5.2-1bionic.20221025.185103_amd64.deb ... Unpacking ros-melodic-srdfdom (0.5.2-1bionic.20221025.185103) ... Selecting previously unselected package ros-melodic-moveit-core. Preparing to unpack .../16-ros-melodic-moveit-core_1.0.11-1bionic.20230524.160243_amd64.deb ... Unpacking ros-melodic-moveit-core (1.0.11-1bionic.20230524.160243) ... Selecting previously unselected package ros-melodic-moveit-ros-occupancy-map-monitor. Preparing to unpack .../17-ros-melodic-moveit-ros-occupancy-map-monitor_1.0.11-1bionic.20230524.162139_amd64.deb ... Unpacking ros-melodic-moveit-ros-occupancy-map-monitor (1.0.11-1bionic.20230524.162139) ... Selecting previously unselected package ros-melodic-moveit-ros-planning. Preparing to unpack .../18-ros-melodic-moveit-ros-planning_1.0.11-1bionic.20230524.163120_amd64.deb ... Unpacking ros-melodic-moveit-ros-planning (1.0.11-1bionic.20230524.163120) ... Selecting previously unselected package ros-melodic-rviz-visual-tools. Preparing to unpack .../19-ros-melodic-rviz-visual-tools_3.8.0-4bionic.20230330.130003_amd64.deb ... Unpacking ros-melodic-rviz-visual-tools (3.8.0-4bionic.20230330.130003) ... Selecting previously unselected package ros-melodic-moveit-visual-tools. Preparing to unpack .../20-ros-melodic-moveit-visual-tools_3.5.2-0bionic.20230524.164622_amd64.deb ... Unpacking ros-melodic-moveit-visual-tools (3.5.2-0bionic.20230524.164622) ... Setting up libqt5x11extras5:amd64 (5.9.5-0ubuntu1) ... Setting up ros-melodic-octomap (1.9.8-1bionic.20220514.014425) ... Setting up ros-melodic-graph-msgs (0.1.0-1bionic.20221025.175948) ... Setting up ros-melodic-random-numbers (0.3.2-0bionic.20201015.065429) ... Setting up ros-melodic-eigen-stl-containers (0.1.8-0bionic.20201015.033045) ... Setting up ros-melodic-srdfdom (0.5.2-1bionic.20221025.185103) ... Setting up ros-melodic-octomap-msgs (0.3.5-1bionic.20221025.175926) ... Setting up ros-melodic-pybind11-catkin (2.4.3-1bionic.20200731.225101) ... Setting up ros-melodic-object-recognition-msgs (0.4.1-0bionic.20221025.191441) ... Setting up liboctomap1.8 (1.8.1+dfsg-1) ... Setting up libfcl0.5 (0.5.0-5) ... Setting up libqt5x11extras5-dev:amd64 (5.9.5-0ubuntu1) ... Setting up ros-melodic-moveit-msgs (0.10.1-1bionic.20221025.191657) ... Setting up liboctomap-dev (1.8.1+dfsg-1) ... Setting up ros-melodic-rviz-visual-tools (3.8.0-4bionic.20230330.130003) ... Setting up libfcl-dev (0.5.0-5) ... Setting up ros-melodic-geometric-shapes (0.6.6-1bionic.20230415.003055) ... Setting up ros-melodic-moveit-core (1.0.11-1bionic.20230524.160243) ... Setting up ros-melodic-moveit-ros-occupancy-map-monitor (1.0.11-1bionic.20230524.162139) ... Setting up ros-melodic-moveit-ros-planning (1.0.11-1bionic.20230524.163120) ... Setting up ros-melodic-moveit-visual-tools (3.5.2-0bionic.20230524.164622) ... Processing triggers for libc-bin (2.27-3ubuntu1.6) ... bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
error
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ catkin_make
Base path: /home/bim/catkin_ws
Source space: /home/bim/catkin_ws/src
Build space: /home/bim/catkin_ws/build
Devel space: /home/bim/catkin_ws/devel
Install space: /home/bim/catkin_ws/install
####
#### Running command: "make cmake_check_build_system" in "/home/bim/catkin_ws/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/bim/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /home/bim/catkin_ws/devel;/opt/ros/melodic
-- This workspace overlays: /home/bim/catkin_ws/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/bim/catkin_ws/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 19 packages in topological order:
-- ~~ - kinova_bringup
-- ~~ - kinova_control
-- ~~ - kinova_gazebo
-- ~~ - realsense2_description
-- ~~ - ddynamic_reconfigure
-- ~~ - kinova_msgs
-- ~~ - kinova_driver
-- ~~ - kinova_demo
-- ~~ - realsense2_camera
-- ~~ - j2n6s300_ikfast
-- ~~ - j2s6s300_ikfast
-- ~~ - j2s7s300_ikfast
-- ~~ - kinova_arm_moveit_demo
-- ~~ - m1n6s300_ikfast
-- ~~ - kinova_description
-- ~~ - j2n6s300_moveit_config
-- ~~ - j2s6s300_moveit_config
-- ~~ - j2s7s300_moveit_config
-- ~~ - m1n6s300_moveit_config
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'kinova_bringup'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_bringup)
-- +++ processing catkin package: 'kinova_control'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_control)
-- +++ processing catkin package: 'kinova_gazebo'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_gazebo)
-- +++ processing catkin package: 'realsense2_description'
-- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_description)
-- +++ processing catkin package: 'ddynamic_reconfigure'
-- ==> add_subdirectory(ddynamic_reconfigure-0.4.1)
-- +++ processing catkin package: 'kinova_msgs'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_msgs)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Generating .msg files for action kinova_msgs/ArmJointAngles /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/ArmJointAngles.action
-- Generating .msg files for action kinova_msgs/ArmPose /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/ArmPose.action
-- Generating .msg files for action kinova_msgs/Arm_KinovaPose /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/Arm_KinovaPose.action
-- Generating .msg files for action kinova_msgs/SetFingersPosition /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/SetFingersPosition.action
-- kinova_msgs: 37 messages, 12 services
-- +++ processing catkin package: 'kinova_driver'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_driver)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'kinova_demo'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_demo)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'realsense2_camera'
-- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_camera)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Create Release Build.
-- realsense2_camera: 3 messages, 1 services
-- +++ processing catkin package: 'j2n6s300_ikfast'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Looking for sgemm_
-- Looking for sgemm_ - found
-- A library with BLAS API found.
-- Looking for cheev_
-- Looking for cheev_ - found
-- A library with LAPACK API found.
-- +++ processing catkin package: 'j2s6s300_ikfast'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- A library with BLAS API found.
-- A library with LAPACK API found.
-- +++ processing catkin package: 'j2s7s300_ikfast'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- A library with BLAS API found.
-- A library with LAPACK API found.
-- +++ processing catkin package: 'kinova_arm_moveit_demo'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Could NOT find moveit_ros_planning_interface (missing: moveit_ros_planning_interface_DIR)
-- Could not find the required component 'moveit_ros_planning_interface'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by
"moveit_ros_planning_interface" with any of the following names:
moveit_ros_planning_interfaceConfig.cmake
moveit_ros_planning_interface-config.cmake
Add the installation prefix of "moveit_ros_planning_interface" to
CMAKE_PREFIX_PATH or set "moveit_ros_planning_interface_DIR" to a directory
containing one of the above files. If "moveit_ros_planning_interface"
provides a separate development package or SDK, be sure it has been
installed.
Call Stack (most recent call first):
kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo/CMakeLists.txt:9 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/bim/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/bim/catkin_ws/build/CMakeFiles/CMakeError.log".
Makefile:1888: recipe for target 'cmake_check_build_system' failed
make: *** [cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
sudo apt-get install ros-melodic-moveit-ros-planning-interface
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-moveit-ros-planning-interface Reading package lists... Done Building dependency tree Reading state information... Done The following additional packages will be installed: liburdfdom-tools python-bs4 python-html5lib python-lxml python-webencodings ros-melodic-eigenpy ros-melodic-moveit-kinematics ros-melodic-moveit-ros-manipulation ros-melodic-moveit-ros-move-group ros-melodic-moveit-ros-warehouse ros-melodic-warehouse-ros Suggested packages: python-genshi python-lxml-dbg python-lxml-doc The following NEW packages will be installed: liburdfdom-tools python-bs4 python-html5lib python-lxml python-webencodings ros-melodic-eigenpy ros-melodic-moveit-kinematics ros-melodic-moveit-ros-manipulation ros-melodic-moveit-ros-move-group ros-melodic-moveit-ros-planning-interface ros-melodic-moveit-ros-warehouse ros-melodic-warehouse-ros 0 upgraded, 12 newly installed, 0 to remove and 35 not upgraded. Need to get 4,070 kB of archives. After this operation, 24.3 MB of additional disk space will be used. Do you want to continue? [Y/n] y Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-eigenpy amd64 2.9.2-1bionic.20230203.070126 [1,140 kB] Get:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-kinematics amd64 1.0.11-1bionic.20230524.164556 [249 kB] Get:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-move-group amd64 1.0.11-1bionic.20230524.165143 [344 kB] Get:4 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-manipulation amd64 1.0.11-1bionic.20230524.170214 [299 kB] Get:5 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-warehouse-ros amd64 0.9.5-1bionic.20221025.194418 [90.5 kB] Get:6 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-warehouse amd64 1.0.11-1bionic.20230524.164057 [349 kB] Get:7 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-planning-interface amd64 1.0.11-1bionic.20230524.170758 [527 kB] Get:8 http://mirrors.aliyun.com/ubuntu bionic/main amd64 python-bs4 all 4.6.0-1 [67.9 kB] Get:9 http://mirrors.aliyun.com/ubuntu bionic/main amd64 python-webencodings all 0.5-2 [10.3 kB] Get:10 http://mirrors.aliyun.com/ubuntu bionic/main amd64 python-html5lib all 0.999999999-1 [83.6 kB] Get:11 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 python-lxml amd64 4.2.1-1ubuntu0.6 [898 kB] Get:12 http://mirrors.aliyun.com/ubuntu bionic-updates/universe amd64 liburdfdom-tools amd64 1.0.0-2ubuntu0.1 [12.5 kB] Fetched 4,070 kB in 2s (1,752 kB/s) Selecting previously unselected package python-bs4. (Reading database ... 251040 files and directories currently installed.) Preparing to unpack .../00-python-bs4_4.6.0-1_all.deb ... Unpacking python-bs4 (4.6.0-1) ... Selecting previously unselected package python-webencodings. Preparing to unpack .../01-python-webencodings_0.5-2_all.deb ... Unpacking python-webencodings (0.5-2) ... Selecting previously unselected package python-html5lib. Preparing to unpack .../02-python-html5lib_0.999999999-1_all.deb ... Unpacking python-html5lib (0.999999999-1) ... Selecting previously unselected package python-lxml:amd64. Preparing to unpack .../03-python-lxml_4.2.1-1ubuntu0.6_amd64.deb ... Unpacking python-lxml:amd64 (4.2.1-1ubuntu0.6) ... Selecting previously unselected package ros-melodic-eigenpy. Preparing to unpack .../04-ros-melodic-eigenpy_2.9.2-1bionic.20230203.070126_amd64.deb ... Unpacking ros-melodic-eigenpy (2.9.2-1bionic.20230203.070126) ... Selecting previously unselected package liburdfdom-tools. Preparing to unpack .../05-liburdfdom-tools_1.0.0-2ubuntu0.1_amd64.deb ... Unpacking liburdfdom-tools (1.0.0-2ubuntu0.1) ... Selecting previously unselected package ros-melodic-moveit-kinematics. Preparing to unpack .../06-ros-melodic-moveit-kinematics_1.0.11-1bionic.20230524.164556_amd64.deb ... Unpacking ros-melodic-moveit-kinematics (1.0.11-1bionic.20230524.164556) ... Selecting previously unselected package ros-melodic-moveit-ros-move-group. Preparing to unpack .../07-ros-melodic-moveit-ros-move-group_1.0.11-1bionic.20230524.165143_amd64.deb ... Unpacking ros-melodic-moveit-ros-move-group (1.0.11-1bionic.20230524.165143) ... Selecting previously unselected package ros-melodic-moveit-ros-manipulation. Preparing to unpack .../08-ros-melodic-moveit-ros-manipulation_1.0.11-1bionic.20230524.170214_amd64.deb ... Unpacking ros-melodic-moveit-ros-manipulation (1.0.11-1bionic.20230524.170214) ... Selecting previously unselected package ros-melodic-warehouse-ros. Preparing to unpack .../09-ros-melodic-warehouse-ros_0.9.5-1bionic.20221025.194418_amd64.deb ... Unpacking ros-melodic-warehouse-ros (0.9.5-1bionic.20221025.194418) ... Selecting previously unselected package ros-melodic-moveit-ros-warehouse. Preparing to unpack .../10-ros-melodic-moveit-ros-warehouse_1.0.11-1bionic.20230524.164057_amd64.deb ... Unpacking ros-melodic-moveit-ros-warehouse (1.0.11-1bionic.20230524.164057) ... Selecting previously unselected package ros-melodic-moveit-ros-planning-interface. Preparing to unpack .../11-ros-melodic-moveit-ros-planning-interface_1.0.11-1bionic.20230524.170758_amd64.deb ... Unpacking ros-melodic-moveit-ros-planning-interface (1.0.11-1bionic.20230524.170758) ... Setting up ros-melodic-warehouse-ros (0.9.5-1bionic.20221025.194418) ... Setting up liburdfdom-tools (1.0.0-2ubuntu0.1) ... Setting up ros-melodic-eigenpy (2.9.2-1bionic.20230203.070126) ... Setting up python-bs4 (4.6.0-1) ... Setting up python-lxml:amd64 (4.2.1-1ubuntu0.6) ... Setting up python-webencodings (0.5-2) ... Setting up ros-melodic-moveit-ros-warehouse (1.0.11-1bionic.20230524.164057) ... Setting up ros-melodic-moveit-kinematics (1.0.11-1bionic.20230524.164556) ... Setting up ros-melodic-moveit-ros-move-group (1.0.11-1bionic.20230524.165143) ... Setting up python-html5lib (0.999999999-1) ... Setting up ros-melodic-moveit-ros-manipulation (1.0.11-1bionic.20230524.170214) ... Setting up ros-melodic-moveit-ros-planning-interface (1.0.11-1bionic.20230524.170758) ... Processing triggers for man-db (2.8.3-2ubuntu0.1) ... Processing triggers for libc-bin (2.27-3ubuntu1.6) ... bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
sudo apt-get install ros-melodic-moveit-ros-perception
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-moveit-ros-perception Reading package lists... Done Building dependency tree Reading state information... Done The following additional packages will be installed: libglew-dev libglew2.0 libomp-dev libomp5 Suggested packages: glew-utils libomp-doc The following NEW packages will be installed: libglew-dev libglew2.0 libomp-dev libomp5 ros-melodic-moveit-ros-perception 0 upgraded, 5 newly installed, 0 to remove and 35 not upgraded. Need to get 774 kB of archives. After this operation, 4,179 kB of additional disk space will be used. Do you want to continue? [Y/n] y Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-perception amd64 1.0.11-1bionic.20230524.164912 [275 kB] Get:2 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libglew2.0 amd64 2.0.0-5 [140 kB] Get:3 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libglew-dev amd64 2.0.0-5 [120 kB] Get:4 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libomp5 amd64 5.0.1-1 [234 kB] Get:5 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libomp-dev amd64 5.0.1-1 [5,088 B] Fetched 774 kB in 1s (1,044 kB/s) Selecting previously unselected package libglew2.0:amd64. (Reading database ... 251502 files and directories currently installed.) Preparing to unpack .../libglew2.0_2.0.0-5_amd64.deb ... Unpacking libglew2.0:amd64 (2.0.0-5) ... Selecting previously unselected package libglew-dev:amd64. Preparing to unpack .../libglew-dev_2.0.0-5_amd64.deb ... Unpacking libglew-dev:amd64 (2.0.0-5) ... Selecting previously unselected package libomp5:amd64. Preparing to unpack .../libomp5_5.0.1-1_amd64.deb ... Unpacking libomp5:amd64 (5.0.1-1) ... Selecting previously unselected package libomp-dev. Preparing to unpack .../libomp-dev_5.0.1-1_amd64.deb ... Unpacking libomp-dev (5.0.1-1) ... Selecting previously unselected package ros-melodic-moveit-ros-perception. Preparing to unpack .../ros-melodic-moveit-ros-perception_1.0.11-1bionic.20230524.164912_amd64.deb ... Unpacking ros-melodic-moveit-ros-perception (1.0.11-1bionic.20230524.164912) ... Setting up libomp5:amd64 (5.0.1-1) ... Setting up libomp-dev (5.0.1-1) ... Setting up libglew2.0:amd64 (2.0.0-5) ... Setting up libglew-dev:amd64 (2.0.0-5) ... Setting up ros-melodic-moveit-ros-perception (1.0.11-1bionic.20230524.164912) ... Processing triggers for libc-bin (2.27-3ubuntu1.6) ... bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
sudo apt-get install ros-melodic-moveit-msgs
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-moveit-msgs Reading package lists... Done Building dependency tree Reading state information... Done ros-melodic-moveit-msgs is already the newest version (0.10.1-1bionic.20221025.191657). ros-melodic-moveit-msgs set to manually installed. 0 upgraded, 0 newly installed, 0 to remove and 35 not upgraded. bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
catkin_make
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$ catkin_make
Base path: /home/bim/catkin_ws
Source space: /home/bim/catkin_ws/src
Build space: /home/bim/catkin_ws/build
Devel space: /home/bim/catkin_ws/devel
Install space: /home/bim/catkin_ws/install
####
#### Running command: "make cmake_check_build_system" in "/home/bim/catkin_ws/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/bim/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /home/bim/catkin_ws/devel;/opt/ros/melodic
-- This workspace overlays: /home/bim/catkin_ws/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/bim/catkin_ws/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 19 packages in topological order:
-- ~~ - kinova_bringup
-- ~~ - kinova_control
-- ~~ - kinova_gazebo
-- ~~ - realsense2_description
-- ~~ - ddynamic_reconfigure
-- ~~ - kinova_msgs
-- ~~ - kinova_driver
-- ~~ - kinova_demo
-- ~~ - realsense2_camera
-- ~~ - j2n6s300_ikfast
-- ~~ - j2s6s300_ikfast
-- ~~ - j2s7s300_ikfast
-- ~~ - m1n6s300_ikfast
-- ~~ - kinova_arm_moveit_demo
-- ~~ - kinova_description
-- ~~ - j2n6s300_moveit_config
-- ~~ - j2s6s300_moveit_config
-- ~~ - j2s7s300_moveit_config
-- ~~ - m1n6s300_moveit_config
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'kinova_bringup'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_bringup)
-- +++ processing catkin package: 'kinova_control'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_control)
-- +++ processing catkin package: 'kinova_gazebo'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_gazebo)
-- +++ processing catkin package: 'realsense2_description'
-- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_description)
-- +++ processing catkin package: 'ddynamic_reconfigure'
-- ==> add_subdirectory(ddynamic_reconfigure-0.4.1)
-- +++ processing catkin package: 'kinova_msgs'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_msgs)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Generating .msg files for action kinova_msgs/ArmJointAngles /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/ArmJointAngles.action
-- Generating .msg files for action kinova_msgs/ArmPose /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/ArmPose.action
-- Generating .msg files for action kinova_msgs/Arm_KinovaPose /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/Arm_KinovaPose.action
-- Generating .msg files for action kinova_msgs/SetFingersPosition /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_msgs/action/SetFingersPosition.action
-- kinova_msgs: 37 messages, 12 services
-- +++ processing catkin package: 'kinova_driver'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_driver)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'kinova_demo'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_demo)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'realsense2_camera'
-- ==> add_subdirectory(realsense-ros-2.3.2/realsense2_camera)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Create Release Build.
-- realsense2_camera: 3 messages, 1 services
-- +++ processing catkin package: 'j2n6s300_ikfast'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- A library with BLAS API found.
-- A library with LAPACK API found.
-- +++ processing catkin package: 'j2s6s300_ikfast'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- A library with BLAS API found.
-- A library with LAPACK API found.
-- +++ processing catkin package: 'j2s7s300_ikfast'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- A library with BLAS API found.
-- A library with LAPACK API found.
-- +++ processing catkin package: 'm1n6s300_ikfast'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- A library with BLAS API found.
-- A library with LAPACK API found.
-- +++ processing catkin package: 'kinova_arm_moveit_demo'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Boost version: 1.65.1
-- Found the following Boost libraries:
-- system
-- filesystem
-- date_time
-- thread
-- chrono
-- atomic
-- +++ processing catkin package: 'kinova_description'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_description)
-- +++ processing catkin package: 'j2n6s300_moveit_config'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2n6s300_moveit_config)
-- +++ processing catkin package: 'j2s6s300_moveit_config'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2s6s300_moveit_config)
-- +++ processing catkin package: 'j2s7s300_moveit_config'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2s7s300_moveit_config)
-- +++ processing catkin package: 'm1n6s300_moveit_config'
-- ==> add_subdirectory(kinova-ros-noetic-devel/kinova_moveit/robot_configs/m1n6s300_moveit_config)
-- Configuring done
-- Generating done
-- Build files have been written to: /home/bim/catkin_ws/build
####
#### Running command: "make -j8 -l8" in "/home/bim/catkin_ws/build"
####
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmPoseAction
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_CartesianForce
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_PoseVelocityWithFingers
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetNullSpaceModeState
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Start
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ZeroTorques
[ 0%] Built target ddynamic_reconfigure
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_JointAngles
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_PoseVelocityWithFingers
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetNullSpaceModeState
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_CartesianForce
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseAction
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Start
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionResult
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ZeroTorques
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionFeedback
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetFingersPositionResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmPoseFeedback
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmPoseActionGoal
Scanning dependencies of target geometry_msgs_generate_messages_py
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesResult
[ 0%] Built target geometry_msgs_generate_messages_py
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_JointAngles
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesAction
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionResult
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionFeedback
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseFeedback
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetEndEffectorOffset
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseActionGoal
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetFingersPositionGoal
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesFeedback
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_PoseVelocityWithFingerVelocity
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_KinovaPose
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetTorqueControlParameters
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesAction
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetEndEffectorOffset
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseGoal
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesFeedback
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionGoal
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_PoseVelocityWithFingerVelocity
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseResult
Scanning dependencies of target actionlib_msgs_generate_messages_py
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_KinovaPose
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_FingerPosition
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ClearTrajectories
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetTorqueControlParameters
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetForceControlParams
[ 0%] Built target actionlib_msgs_generate_messages_py
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_JointTorque
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetFingersPositionAction
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetTorqueControlMode
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseGoal
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_FingerPosition
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetForceControlParams
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_JointVelocity
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ClearTrajectories
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmPoseActionResult
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_AddPoseToCartesianTrajectory
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionAction
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionGoal
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_JointTorque
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetTorqueControlMode
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionGoal
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmPoseGoal
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetFingersPositionFeedback
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseAction
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_JointVelocity
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseActionResult
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_AddPoseToCartesianTrajectory
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_HomeArm
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesActionGoal
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionGoal
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionFeedback
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionFeedback
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_PoseVelocity
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseGoal
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_RunCOMParametersEstimation
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseAction
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmPoseActionFeedback
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseFeedback
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionGoal
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionFeedback
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_HomeArm
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_SetFingersPositionActionFeedback
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_PoseVelocity
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmPoseResult
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_RunCOMParametersEstimation
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseFeedback
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseActionFeedback
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesGoal
Scanning dependencies of target _kinova_msgs_generate_messages_check_deps_Stop
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionGoal
Scanning dependencies of target actionlib_msgs_generate_messages_cpp
Scanning dependencies of target geometry_msgs_generate_messages_cpp
Scanning dependencies of target actionlib_msgs_generate_messages_nodejs
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Arm_KinovaPoseActionFeedback
Scanning dependencies of target geometry_msgs_generate_messages_nodejs
[ 0%] Built target actionlib_msgs_generate_messages_cpp
[ 0%] Built target actionlib_msgs_generate_messages_nodejs
Scanning dependencies of target actionlib_msgs_generate_messages_lisp
[ 0%] Built target geometry_msgs_generate_messages_cpp
[ 0%] Built target geometry_msgs_generate_messages_nodejs
Scanning dependencies of target geometry_msgs_generate_messages_lisp
Scanning dependencies of target actionlib_msgs_generate_messages_eus
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmPoseResult
[ 0%] Built target actionlib_msgs_generate_messages_lisp
Scanning dependencies of target geometry_msgs_generate_messages_eus
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_ArmJointAnglesGoal
[ 0%] Built target _kinova_msgs_generate_messages_check_deps_Stop
Scanning dependencies of target tf2_msgs_generate_messages_lisp
[ 0%] Built target geometry_msgs_generate_messages_lisp
[ 0%] Built target actionlib_msgs_generate_messages_eus
[ 0%] Built target geometry_msgs_generate_messages_eus
[ 0%] Built target tf2_msgs_generate_messages_lisp
[ 0%] Built target roscpp_generate_messages_lisp
[ 0%] Built target std_msgs_generate_messages_py
[ 0%] Built target roscpp_generate_messages_nodejs
[ 0%] Built target std_msgs_generate_messages_nodejs
[ 0%] Built target roscpp_generate_messages_eus
[ 0%] Built target dynamic_reconfigure_generate_messages_eus
[ 0%] Built target std_msgs_generate_messages_eus
[ 0%] Built target rosgraph_msgs_generate_messages_py
[ 0%] Built target roscpp_generate_messages_py
[ 0%] Built target std_msgs_generate_messages_cpp
[ 0%] Built target dynamic_reconfigure_generate_messages_py
[ 0%] Built target dynamic_reconfigure_generate_messages_cpp
[ 0%] Built target dynamic_reconfigure_generate_messages_nodejs
[ 0%] Built target rosgraph_msgs_generate_messages_cpp
[ 0%] Built target rosgraph_msgs_generate_messages_eus
[ 0%] Built target rosgraph_msgs_generate_messages_lisp
Scanning dependencies of target actionlib_generate_messages_py
[ 0%] Built target dynamic_reconfigure_generate_messages_lisp
[ 0%] Built target dynamic_reconfigure_gencfg
[ 0%] Built target std_msgs_generate_messages_lisp
Scanning dependencies of target actionlib_generate_messages_cpp
[ 0%] Built target rosgraph_msgs_generate_messages_nodejs
Scanning dependencies of target actionlib_generate_messages_nodejs
[ 0%] Built target actionlib_generate_messages_py
[ 0%] Built target roscpp_generate_messages_cpp
Scanning dependencies of target actionlib_generate_messages_eus
Scanning dependencies of target actionlib_generate_messages_lisp
Scanning dependencies of target visualization_msgs_generate_messages_py
[ 0%] Built target actionlib_generate_messages_nodejs
[ 0%] Built target actionlib_generate_messages_cpp
Scanning dependencies of target visualization_msgs_generate_messages_nodejs
Scanning dependencies of target visualization_msgs_generate_messages_lisp
Scanning dependencies of target visualization_msgs_generate_messages_eus
[ 0%] Built target actionlib_generate_messages_eus
[ 0%] Built target actionlib_generate_messages_lisp
Scanning dependencies of target visualization_msgs_generate_messages_cpp
[ 0%] Built target visualization_msgs_generate_messages_nodejs
[ 0%] Built target visualization_msgs_generate_messages_py
[ 0%] Built target visualization_msgs_generate_messages_lisp
Scanning dependencies of target sensor_msgs_generate_messages_nodejs
[ 0%] Built target visualization_msgs_generate_messages_eus
Scanning dependencies of target sensor_msgs_generate_messages_cpp
Scanning dependencies of target sensor_msgs_generate_messages_lisp
Scanning dependencies of target tf_generate_messages_cpp
[ 0%] Built target visualization_msgs_generate_messages_cpp
Scanning dependencies of target sensor_msgs_generate_messages_eus
Scanning dependencies of target sensor_msgs_generate_messages_py
[ 0%] Built target sensor_msgs_generate_messages_nodejs
[ 0%] Built target sensor_msgs_generate_messages_lisp
Scanning dependencies of target tf2_msgs_generate_messages_py
[ 0%] Built target sensor_msgs_generate_messages_cpp
[ 0%] Built target tf_generate_messages_cpp
Scanning dependencies of target tf_generate_messages_eus
[ 0%] Built target sensor_msgs_generate_messages_eus
Scanning dependencies of target tf_generate_messages_py
[ 0%] Built target sensor_msgs_generate_messages_py
Scanning dependencies of target tf2_msgs_generate_messages_cpp
[ 0%] Built target tf2_msgs_generate_messages_py
Scanning dependencies of target tf_generate_messages_lisp
Scanning dependencies of target tf2_msgs_generate_messages_eus
[ 0%] Built target tf_generate_messages_eus
Scanning dependencies of target tf_generate_messages_nodejs
[ 0%] Built target tf_generate_messages_py
Scanning dependencies of target tf2_msgs_generate_messages_nodejs
[ 0%] Built target tf2_msgs_generate_messages_cpp
[ 0%] Built target tf2_msgs_generate_messages_eus
Scanning dependencies of target kinova_driver_gencfg
[ 0%] Built target tf_generate_messages_lisp
[ 0%] Built target tf_generate_messages_nodejs
Scanning dependencies of target _catkin_empty_exported_target
[ 0%] Built target tf2_msgs_generate_messages_nodejs
[ 0%] Built target kinova_driver_gencfg
[ 0%] Built target diagnostic_msgs_generate_messages_lisp
[ 0%] Built target _catkin_empty_exported_target
[ 0%] Built target bond_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_py
[ 0%] Built target std_srvs_generate_messages_lisp
[ 0%] Built target nodelet_generate_messages_py
[ 0%] Built target bond_generate_messages_nodejs
[ 0%] Built target diagnostic_msgs_generate_messages_nodejs
[ 0%] Built target nodelet_generate_messages_lisp
[ 0%] Built target std_srvs_generate_messages_py
[ 0%] Built target nodelet_generate_messages_nodejs
[ 0%] Built target nav_msgs_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_eus
[ 0%] Built target nav_msgs_generate_messages_nodejs
[ 0%] Built target std_srvs_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_lisp
[ 0%] Built target bond_generate_messages_lisp
[ 0%] Built target bond_generate_messages_eus
[ 0%] Built target nodelet_generate_messages_cpp
[ 0%] Built target std_srvs_generate_messages_nodejs
[ 0%] Built target _realsense2_camera_generate_messages_check_deps_DeviceInfo
[ 0%] Built target _realsense2_camera_generate_messages_check_deps_Extrinsics
[ 0%] Built target _realsense2_camera_generate_messages_check_deps_Metadata
[ 0%] Built target bond_generate_messages_py
[ 0%] Built target diagnostic_msgs_generate_messages_cpp
[ 0%] Built target _realsense2_camera_generate_messages_check_deps_IMUInfo
[ 0%] Built target diagnostic_msgs_generate_messages_eus
[ 0%] Built target nodelet_generate_messages_eus
Scanning dependencies of target j2n6s300_arm_moveit_ikfast_plugin
Scanning dependencies of target j2s6s300_arm_moveit_ikfast_plugin
Scanning dependencies of target j2s7s300_robot_arm_moveit_ikfast_plugin
[ 0%] Built target diagnostic_msgs_generate_messages_py
Scanning dependencies of target m1n6s300_mico_arm_moveit_ikfast_plugin
[ 0%] Built target std_srvs_generate_messages_eus
Scanning dependencies of target kinova_msgs_generate_messages_py
[ 1%] Built target fake_dynamic_reconfigure_server
[ 2%] Built target test_bool_dynamic_reconfigure_server
[ 2%] Building CXX object kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/CMakeFiles/j2n6s300_arm_moveit_ikfast_plugin.dir/src/j2n6s300_arm_ikfast_moveit_plugin.cpp.o
[ 3%] Building CXX object kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/CMakeFiles/j2s6s300_arm_moveit_ikfast_plugin.dir/src/j2s6s300_arm_ikfast_moveit_plugin.cpp.o
[ 4%] Generating Python from MSG kinova_msgs/ArmJointAnglesAction
[ 4%] Building CXX object kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/CMakeFiles/m1n6s300_mico_arm_moveit_ikfast_plugin.dir/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp.o
[ 4%] Building CXX object kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/CMakeFiles/j2s7s300_robot_arm_moveit_ikfast_plugin.dir/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp.o
[ 4%] Generating Python from MSG kinova_msgs/SetFingersPositionGoal
[ 4%] Built target ddynamic_reconfigure_auto_update_test
[ 4%] Generating Python from MSG kinova_msgs/ArmJointAnglesActionResult
Scanning dependencies of target kinova_msgs_generate_messages_cpp
[ 4%] Generating C++ code from kinova_msgs/ArmJointAnglesAction.msg
[ 5%] Generating C++ code from kinova_msgs/ArmJointAnglesActionResult.msg
[ 5%] Generating Python from MSG kinova_msgs/Arm_KinovaPoseActionResult
[ 6%] Generating Python from MSG kinova_msgs/ArmPoseAction
[ 6%] Generating C++ code from kinova_msgs/SetFingersPositionGoal.msg
[ 6%] Generating Python from MSG kinova_msgs/CartesianForce
[ 6%] Generating Python from MSG kinova_msgs/SetFingersPositionActionResult
[ 6%] Generating C++ code from kinova_msgs/Arm_KinovaPoseActionResult.msg
[ 7%] Generating C++ code from kinova_msgs/ArmPoseAction.msg
[ 8%] Generating Python from MSG kinova_msgs/Arm_KinovaPoseAction
[ 8%] Generating Python from MSG kinova_msgs/SetFingersPositionActionFeedback
[ 8%] Generating C++ code from kinova_msgs/CartesianForce.msg
[ 8%] Generating C++ code from kinova_msgs/SetFingersPositionActionResult.msg
[ 8%] Generating Python from MSG kinova_msgs/ArmPoseActionGoal
[ 9%] Generating Python from MSG kinova_msgs/JointVelocity
[ 10%] Generating C++ code from kinova_msgs/Arm_KinovaPoseAction.msg
[ 10%] Generating C++ code from kinova_msgs/SetFingersPositionActionFeedback.msg
[ 10%] Generating Python from MSG kinova_msgs/ArmJointAnglesActionFeedback
[ 10%] Generating Python from MSG kinova_msgs/PoseVelocityWithFingers
[ 10%] Generating C++ code from kinova_msgs/ArmPoseActionGoal.msg
[ 10%] Generating C++ code from kinova_msgs/JointVelocity.msg
[ 10%] Generating Python from MSG kinova_msgs/KinovaPose
[ 11%] Generating C++ code from kinova_msgs/ArmJointAnglesActionFeedback.msg
[ 11%] Generating C++ code from kinova_msgs/PoseVelocityWithFingers.msg
[ 11%] Generating C++ code from kinova_msgs/KinovaPose.msg
[ 12%] Generating Python from MSG kinova_msgs/JointAngles
[ 13%] Generating C++ code from kinova_msgs/JointAngles.msg
[ 13%] Generating C++ code from kinova_msgs/Arm_KinovaPoseGoal.msg
[ 13%] Generating Python from MSG kinova_msgs/Arm_KinovaPoseGoal
[ 13%] Generating C++ code from kinova_msgs/SetFingersPositionAction.msg
[ 14%] Generating C++ code from kinova_msgs/PoseVelocity.msg
[ 14%] Generating Python from MSG kinova_msgs/SetFingersPositionAction
[ 14%] Generating C++ code from kinova_msgs/JointTorque.msg
[ 14%] Generating C++ code from kinova_msgs/ArmJointAnglesActionGoal.msg
[ 14%] Generating C++ code from kinova_msgs/SetFingersPositionActionGoal.msg
[ 15%] Generating Python from MSG kinova_msgs/PoseVelocity
[ 15%] Generating Python from MSG kinova_msgs/JointTorque
[ 16%] Generating C++ code from kinova_msgs/SetFingersPositionFeedback.msg
[ 16%] Generating C++ code from kinova_msgs/ArmPoseGoal.msg
[ 16%] Generating Python from MSG kinova_msgs/ArmJointAnglesActionGoal
[ 17%] Generating Python from MSG kinova_msgs/SetFingersPositionActionGoal
[ 17%] Generating C++ code from kinova_msgs/PoseVelocityWithFingerVelocity.msg
[ 18%] Generating C++ code from kinova_msgs/ArmPoseActionFeedback.msg
[ 18%] Generating Python from MSG kinova_msgs/SetFingersPositionFeedback
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp: In member function ‘virtual bool ikfast_kinematics_plugin::IKFastKinematicsPlugin::initialize(const string&, const string&, const string&, const string&, double)’:
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:320:86: warning: ‘virtual void kinematics::KinematicsBase::setValues(const string&, const string&, const string&, const string&, double)’ is deprecated [-Wdeprecated-declarations]
setValues(robot_description, group_name, base_name, tip_name, search_discretization);
^
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:344:31: note: declared here
[[deprecated]] virtual void setValues(const std::string& robot_description, const std::string& group_name,
^~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp: In member function ‘virtual bool ikfast_kinematics_plugin::IKFastKinematicsPlugin::initialize(const string&, const string&, const string&, const string&, double)’:
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:343:86: warning: ‘virtual void kinematics::KinematicsBase::setValues(const string&, const string&, const string&, const string&, double)’ is deprecated [-Wdeprecated-declarations]
setValues(robot_description, group_name, base_name, tip_name, search_discretization);
^
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:344:31: note: declared here
[[deprecated]] virtual void setValues(const std::string& robot_description, const std::string& group_name,
^~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp: In member function ‘virtual bool ikfast_kinematics_plugin::IKFastKinematicsPlugin::searchPositionIK(const Pose&, const std::vector<double>&, double, const std::vector<double>&, std::vector<double>&, const IKCallbackFn&, moveit_msgs::MoveItErrorCodes&, const kinematics::KinematicsQueryOptions&) const’:
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:880:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (int)((max_limit-initial_guess)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:880:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (int)((max_limit-initial_guess)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:881:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (int)((initial_guess-min_limit)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:881:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (int)((initial_guess-min_limit)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:885:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (joint_max_vector_[free_params_[0]]-initial_guess)/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:885:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (joint_max_vector_[free_params_[0]]-initial_guess)/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:886:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (initial_guess-joint_min_vector_[free_params_[0]])/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:886:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (initial_guess-joint_min_vector_[free_params_[0]])/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
[ 18%] Generating Python from MSG kinova_msgs/ArmPoseGoal
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:975:30: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
vfree[0] = initial_guess+search_discretization_*counter;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:975:30: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
vfree[0] = initial_guess+search_discretization_*counter;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s7s300_ikfast/src/j2s7s300_robot_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp: In member function ‘virtual bool ikfast_kinematics_plugin::IKFastKinematicsPlugin::searchPositionIK(const Pose&, const std::vector<double>&, double, const std::vector<double>&, std::vector<double>&, const IKCallbackFn&, moveit_msgs::MoveItErrorCodes&, const kinematics::KinematicsQueryOptions&) const’:
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:980:67: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (int)((max_limit - initial_guess) / search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:980:67: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (int)((max_limit - initial_guess) / search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:981:67: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (int)((initial_guess - min_limit) / search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:981:67: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (int)((initial_guess - min_limit) / search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:985:86: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (joint_max_vector_[free_params_[0]] - initial_guess) / search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:985:86: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (joint_max_vector_[free_params_[0]] - initial_guess) / search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:986:86: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (initial_guess - joint_min_vector_[free_params_[0]]) / search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:986:86: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (initial_guess - joint_min_vector_[free_params_[0]]) / search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:1078:32: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
vfree[0] = initial_guess + search_discretization_ * counter;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:1078:32: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
vfree[0] = initial_guess + search_discretization_ * counter;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2s6s300_ikfast/src/j2s6s300_arm_ikfast_moveit_plugin.cpp:50:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
[ 18%] Generating C++ code from kinova_msgs/Arm_KinovaPoseResult.msg
[ 18%] Generating C++ code from kinova_msgs/ArmPoseFeedback.msg
[ 18%] Generating Python from MSG kinova_msgs/PoseVelocityWithFingerVelocity
[ 19%] Generating Python from MSG kinova_msgs/ArmPoseActionFeedback
[ 20%] Generating C++ code from kinova_msgs/Arm_KinovaPoseFeedback.msg
[ 20%] Generating C++ code from kinova_msgs/FingerPosition.msg
[ 20%] Generating Python from MSG kinova_msgs/Arm_KinovaPoseResult
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp: In member function ‘virtual bool ikfast_kinematics_plugin::IKFastKinematicsPlugin::initialize(const string&, const string&, const string&, const string&, double)’:
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:320:86: warning: ‘virtual void kinematics::KinematicsBase::setValues(const string&, const string&, const string&, const string&, double)’ is deprecated [-Wdeprecated-declarations]
setValues(robot_description, group_name, base_name, tip_name, search_discretization);
^
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:344:31: note: declared here
[[deprecated]] virtual void setValues(const std::string& robot_description, const std::string& group_name,
^~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp: In member function ‘virtual bool ikfast_kinematics_plugin::IKFastKinematicsPlugin::initialize(const string&, const string&, const string&, const string&, double)’:
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:320:86: warning: ‘virtual void kinematics::KinematicsBase::setValues(const string&, const string&, const string&, const string&, double)’ is deprecated [-Wdeprecated-declarations]
setValues(robot_description, group_name, base_name, tip_name, search_discretization);
^
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:344:31: note: declared here
[[deprecated]] virtual void setValues(const std::string& robot_description, const std::string& group_name,
^~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp: In member function ‘virtual bool ikfast_kinematics_plugin::IKFastKinematicsPlugin::searchPositionIK(const Pose&, const std::vector<double>&, double, const std::vector<double>&, std::vector<double>&, const IKCallbackFn&, moveit_msgs::MoveItErrorCodes&, const kinematics::KinematicsQueryOptions&) const’:
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:880:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (int)((max_limit-initial_guess)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:880:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (int)((max_limit-initial_guess)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:881:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (int)((initial_guess-min_limit)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:881:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (int)((initial_guess-min_limit)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:885:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (joint_max_vector_[free_params_[0]]-initial_guess)/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:885:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (joint_max_vector_[free_params_[0]]-initial_guess)/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:886:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (initial_guess-joint_min_vector_[free_params_[0]])/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:886:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (initial_guess-joint_min_vector_[free_params_[0]])/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
[ 20%] Generating Python from MSG kinova_msgs/ArmPoseFeedback
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:975:30: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
vfree[0] = initial_guess+search_discretization_*counter;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:975:30: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
vfree[0] = initial_guess+search_discretization_*counter;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/j2n6s300_ikfast/src/j2n6s300_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp: In member function ‘virtual bool ikfast_kinematics_plugin::IKFastKinematicsPlugin::searchPositionIK(const Pose&, const std::vector<double>&, double, const std::vector<double>&, std::vector<double>&, const IKCallbackFn&, moveit_msgs::MoveItErrorCodes&, const kinematics::KinematicsQueryOptions&) const’:
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:880:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (int)((max_limit-initial_guess)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:880:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (int)((max_limit-initial_guess)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:881:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (int)((initial_guess-min_limit)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:881:63: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (int)((initial_guess-min_limit)/search_discretization_);
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:885:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (joint_max_vector_[free_params_[0]]-initial_guess)/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:885:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_positive_increments = (joint_max_vector_[free_params_[0]]-initial_guess)/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:886:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (initial_guess-joint_min_vector_[free_params_[0]])/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:886:82: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
num_negative_increments = (initial_guess-joint_min_vector_[free_params_[0]])/search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:975:30: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
vfree[0] = initial_guess+search_discretization_*counter;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
/home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:975:30: warning: ‘kinematics::KinematicsBase::search_discretization_’ is deprecated [-Wdeprecated-declarations]
vfree[0] = initial_guess+search_discretization_*counter;
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/bim/catkin_ws/src/kinova-ros-noetic-devel/kinova_moveit/inverse_kinematics_plugins/ikfast/m1n6s300_ikfast/src/m1n6s300_mico_arm_ikfast_moveit_plugin.cpp:49:0:
/opt/ros/melodic/include/moveit/kinematics_base/kinematics_base.h:597:25: note: declared here
[[deprecated]] double search_discretization_;
^~~~~~~~~~~~~~~~~~~~~~
[ 20%] Generating C++ code from kinova_msgs/ArmJointAnglesFeedback.msg
[ 20%] Generating C++ code from kinova_msgs/Arm_KinovaPoseActionFeedback.msg
[ 21%] Generating Python from MSG kinova_msgs/Arm_KinovaPoseFeedback
[ 21%] Generating Python from MSG kinova_msgs/FingerPosition
[ 22%] Generating C++ code from kinova_msgs/ArmPoseResult.msg
[ 22%] Generating Python from MSG kinova_msgs/ArmJointAnglesFeedback
[ 22%] Generating C++ code from kinova_msgs/ArmPoseActionResult.msg
[ 23%] Generating Python from MSG kinova_msgs/Arm_KinovaPoseActionFeedback
[ 23%] Generating C++ code from kinova_msgs/SetFingersPositionResult.msg
[ 23%] Generating Python from MSG kinova_msgs/ArmPoseResult
[ 25%] Generating C++ code from kinova_msgs/ArmJointAnglesGoal.msg
[ 25%] Generating Python from MSG kinova_msgs/ArmPoseActionResult
[ 25%] Generating C++ code from kinova_msgs/Arm_KinovaPoseActionGoal.msg
[ 25%] Generating Python from MSG kinova_msgs/SetFingersPositionResult
[ 25%] Generating C++ code from kinova_msgs/ArmJointAnglesResult.msg
[ 26%] Generating Python from MSG kinova_msgs/ArmJointAnglesGoal
[ 26%] Generating Python from MSG kinova_msgs/Arm_KinovaPoseActionGoal
[ 27%] Generating C++ code from kinova_msgs/SetNullSpaceModeState.srv
[ 27%] Generating C++ code from kinova_msgs/SetTorqueControlMode.srv
[ 27%] Generating Python from MSG kinova_msgs/ArmJointAnglesResult
[ 28%] Generating Python code from SRV kinova_msgs/SetNullSpaceModeState
[ 28%] Generating C++ code from kinova_msgs/Start.srv
[ 28%] Generating Python code from SRV kinova_msgs/SetTorqueControlMode
[ 28%] Generating C++ code from kinova_msgs/SetEndEffectorOffset.srv
[ 28%] Generating Python code from SRV kinova_msgs/Start
[ 29%] Generating Python code from SRV kinova_msgs/SetEndEffectorOffset
[ 29%] Generating Python code from SRV kinova_msgs/Stop
[ 30%] Generating C++ code from kinova_msgs/Stop.srv
[ 30%] Generating Python code from SRV kinova_msgs/HomeArm
[ 30%] Generating C++ code from kinova_msgs/HomeArm.srv
[ 30%] Generating Python code from SRV kinova_msgs/RunCOMParametersEstimation
[ 31%] Generating Python code from SRV kinova_msgs/ZeroTorques
[ 31%] Generating Python code from SRV kinova_msgs/ClearTrajectories
[ 31%] Generating Python code from SRV kinova_msgs/SetForceControlParams
[ 31%] Generating C++ code from kinova_msgs/RunCOMParametersEstimation.srv
Scanning dependencies of target kinova_msgs_generate_messages_nodejs
[ 31%] Generating Javascript code from kinova_msgs/ArmJointAnglesAction.msg
[ 31%] Generating Javascript code from kinova_msgs/ArmJointAnglesActionResult.msg
[ 32%] Generating Python code from SRV kinova_msgs/AddPoseToCartesianTrajectory
[ 32%] Generating Javascript code from kinova_msgs/SetFingersPositionGoal.msg
[ 32%] Generating Python code from SRV kinova_msgs/SetTorqueControlParameters
[ 33%] Generating Javascript code from kinova_msgs/Arm_KinovaPoseActionResult.msg
[ 33%] Generating Javascript code from kinova_msgs/ArmPoseAction.msg
[ 34%] Generating C++ code from kinova_msgs/ZeroTorques.srv
[ 34%] Generating C++ code from kinova_msgs/ClearTrajectories.srv
[ 34%] Generating Javascript code from kinova_msgs/CartesianForce.msg
[ 34%] Generating Python msg __init__.py for kinova_msgs
[ 35%] Generating Javascript code from kinova_msgs/SetFingersPositionActionResult.msg
[ 35%] Generating Javascript code from kinova_msgs/Arm_KinovaPoseAction.msg
[ 35%] Generating Javascript code from kinova_msgs/SetFingersPositionActionFeedback.msg
[ 36%] Generating Python srv __init__.py for kinova_msgs
[ 37%] Generating Javascript code from kinova_msgs/ArmPoseActionGoal.msg
[ 37%] Generating C++ code from kinova_msgs/SetForceControlParams.srv
[ 37%] Generating Javascript code from kinova_msgs/JointVelocity.msg
[ 38%] Generating C++ code from kinova_msgs/AddPoseToCartesianTrajectory.srv
[ 38%] Generating Javascript code from kinova_msgs/ArmJointAnglesActionFeedback.msg
[ 38%] Built target kinova_msgs_generate_messages_py
Scanning dependencies of target kinova_msgs_generate_messages_lisp
[ 38%] Generating Javascript code from kinova_msgs/PoseVelocityWithFingers.msg
[ 38%] Generating Lisp code from kinova_msgs/ArmJointAnglesAction.msg
[ 39%] Generating Javascript code from kinova_msgs/KinovaPose.msg
[ 39%] Generating Lisp code from kinova_msgs/ArmJointAnglesActionResult.msg
[ 39%] Generating Javascript code from kinova_msgs/JointAngles.msg
[ 40%] Generating Lisp code from kinova_msgs/SetFingersPositionGoal.msg
[ 40%] Generating C++ code from kinova_msgs/SetTorqueControlParameters.srv
[ 40%] Generating Javascript code from kinova_msgs/Arm_KinovaPoseGoal.msg
[ 40%] Generating Lisp code from kinova_msgs/Arm_KinovaPoseActionResult.msg
[ 40%] Generating Javascript code from kinova_msgs/PoseVelocity.msg
[ 41%] Generating Javascript code from kinova_msgs/SetFingersPositionAction.msg
[ 41%] Generating Lisp code from kinova_msgs/ArmPoseAction.msg
[ 41%] Generating Javascript code from kinova_msgs/JointTorque.msg
Scanning dependencies of target kinova_msgs_generate_messages_eus
[ 42%] Generating Lisp code from kinova_msgs/CartesianForce.msg
[ 42%] Generating EusLisp code from kinova_msgs/ArmJointAnglesAction.msg
[ 43%] Generating Javascript code from kinova_msgs/ArmJointAnglesActionGoal.msg
[ 43%] Generating Lisp code from kinova_msgs/SetFingersPositionActionResult.msg
[ 43%] Generating EusLisp code from kinova_msgs/ArmJointAnglesActionResult.msg
[ 43%] Generating Javascript code from kinova_msgs/SetFingersPositionActionGoal.msg
[ 43%] Generating Lisp code from kinova_msgs/Arm_KinovaPoseAction.msg
[ 43%] Built target kinova_msgs_generate_messages_cpp
[ 43%] Generating Javascript code from kinova_msgs/SetFingersPositionFeedback.msg
[ 44%] Built target realsense2_camera_generate_messages_cpp
[ 45%] Generating EusLisp code from kinova_msgs/SetFingersPositionGoal.msg
[ 46%] Generating Lisp code from kinova_msgs/SetFingersPositionActionFeedback.msg
[ 47%] Built target realsense2_camera_generate_messages_eus
[ 47%] Generating Javascript code from kinova_msgs/ArmPoseGoal.msg
[ 50%] Built target realsense2_camera_generate_messages_py
[ 50%] Generating Lisp code from kinova_msgs/ArmPoseActionGoal.msg
[ 50%] Generating Lisp code from kinova_msgs/JointVelocity.msg
[ 50%] Generating EusLisp code from kinova_msgs/Arm_KinovaPoseActionResult.msg
[ 51%] Generating Javascript code from kinova_msgs/PoseVelocityWithFingerVelocity.msg
[ 51%] Generating Javascript code from kinova_msgs/ArmPoseActionFeedback.msg
[ 51%] Generating Lisp code from kinova_msgs/ArmJointAnglesActionFeedback.msg
[ 51%] Generating Javascript code from kinova_msgs/Arm_KinovaPoseResult.msg
[ 51%] Generating EusLisp code from kinova_msgs/ArmPoseAction.msg
[ 52%] Generating Lisp code from kinova_msgs/PoseVelocityWithFingers.msg
[ 53%] Generating Javascript code from kinova_msgs/ArmPoseFeedback.msg
[ 53%] Generating Javascript code from kinova_msgs/Arm_KinovaPoseFeedback.msg
[ 53%] Generating Lisp code from kinova_msgs/KinovaPose.msg
[ 53%] Generating Javascript code from kinova_msgs/FingerPosition.msg
[ 54%] Generating EusLisp code from kinova_msgs/CartesianForce.msg
[ 54%] Generating EusLisp code from kinova_msgs/SetFingersPositionActionResult.msg
[ 55%] Generating Lisp code from kinova_msgs/JointAngles.msg
[ 55%] Generating Javascript code from kinova_msgs/ArmJointAnglesFeedback.msg
[ 55%] Generating EusLisp code from kinova_msgs/Arm_KinovaPoseAction.msg
[ 55%] Generating Javascript code from kinova_msgs/Arm_KinovaPoseActionFeedback.msg
[ 56%] Generating EusLisp code from kinova_msgs/SetFingersPositionActionFeedback.msg
[ 57%] Generating Lisp code from kinova_msgs/Arm_KinovaPoseGoal.msg
[ 58%] Linking CXX shared library /home/bim/catkin_ws/devel/lib/libj2s7s300_robot_arm_moveit_ikfast_plugin.so
[ 58%] Generating Javascript code from kinova_msgs/ArmPoseResult.msg
[ 58%] Generating Lisp code from kinova_msgs/SetFingersPositionAction.msg
[ 58%] Generating EusLisp code from kinova_msgs/ArmPoseActionGoal.msg
[ 58%] Generating EusLisp code from kinova_msgs/JointVelocity.msg
[ 58%] Generating Javascript code from kinova_msgs/ArmPoseActionResult.msg
[ 58%] Generating Lisp code from kinova_msgs/PoseVelocity.msg
[ 59%] Generating Javascript code from kinova_msgs/SetFingersPositionResult.msg
[ 60%] Generating EusLisp code from kinova_msgs/ArmJointAnglesActionFeedback.msg
[ 60%] Generating Lisp code from kinova_msgs/JointTorque.msg
[ 61%] Generating EusLisp code from kinova_msgs/PoseVelocityWithFingers.msg
[ 61%] Linking CXX shared library /home/bim/catkin_ws/devel/lib/libj2s6s300_arm_moveit_ikfast_plugin.so
[ 61%] Generating Javascript code from kinova_msgs/ArmJointAnglesGoal.msg
[ 61%] Generating Lisp code from kinova_msgs/ArmJointAnglesActionGoal.msg
[ 61%] Built target j2s7s300_robot_arm_moveit_ikfast_plugin
[ 61%] Generating Javascript code from kinova_msgs/Arm_KinovaPoseActionGoal.msg
[ 61%] Generating EusLisp code from kinova_msgs/KinovaPose.msg
[ 61%] Generating Lisp code from kinova_msgs/SetFingersPositionActionGoal.msg
[ 61%] Generating EusLisp code from kinova_msgs/JointAngles.msg
[ 62%] Built target realsense2_camera_generate_messages_nodejs
[ 63%] Generating Javascript code from kinova_msgs/ArmJointAnglesResult.msg
[ 63%] Generating Lisp code from kinova_msgs/SetFingersPositionFeedback.msg
[ 65%] Built target realsense2_camera_generate_messages_lisp
[ 65%] Generating Javascript code from kinova_msgs/SetNullSpaceModeState.srv
[ 66%] Generating EusLisp code from kinova_msgs/Arm_KinovaPoseGoal.msg
[ 66%] Generating Javascript code from kinova_msgs/SetTorqueControlMode.srv
[ 67%] Generating Lisp code from kinova_msgs/ArmPoseGoal.msg
[ 68%] Built target realsense2_camera
[ 69%] Generating Javascript code from kinova_msgs/Start.srv
[ 69%] Built target realsense2_camera_generate_messages
[ 69%] Generating Javascript code from kinova_msgs/SetEndEffectorOffset.srv
[ 69%] Generating Javascript code from kinova_msgs/Stop.srv
[ 69%] Generating Lisp code from kinova_msgs/PoseVelocityWithFingerVelocity.msg
[ 69%] Generating EusLisp code from kinova_msgs/SetFingersPositionAction.msg
[ 69%] Built target j2s6s300_arm_moveit_ikfast_plugin
[ 69%] Generating Javascript code from kinova_msgs/HomeArm.srv
[ 70%] Generating Javascript code from kinova_msgs/RunCOMParametersEstimation.srv
[ 70%] Generating Javascript code from kinova_msgs/ZeroTorques.srv
[ 70%] Generating Javascript code from kinova_msgs/ClearTrajectories.srv
[ 70%] Generating Lisp code from kinova_msgs/ArmPoseActionFeedback.msg
[ 71%] Generating Lisp code from kinova_msgs/Arm_KinovaPoseResult.msg
[ 72%] Generating Javascript code from kinova_msgs/SetForceControlParams.srv
[ 72%] Generating Lisp code from kinova_msgs/ArmPoseFeedback.msg
[ 72%] Generating EusLisp code from kinova_msgs/PoseVelocity.msg
[ 73%] Generating EusLisp code from kinova_msgs/JointTorque.msg
[ 73%] Generating Javascript code from kinova_msgs/AddPoseToCartesianTrajectory.srv
[ 73%] Generating Lisp code from kinova_msgs/Arm_KinovaPoseFeedback.msg
[ 73%] Generating EusLisp code from kinova_msgs/ArmJointAnglesActionGoal.msg
[ 73%] Generating EusLisp code from kinova_msgs/SetFingersPositionActionGoal.msg
[ 73%] Generating Javascript code from kinova_msgs/SetTorqueControlParameters.srv
[ 73%] Generating EusLisp code from kinova_msgs/SetFingersPositionFeedback.msg
[ 75%] Generating Lisp code from kinova_msgs/FingerPosition.msg
[ 76%] Generating EusLisp code from kinova_msgs/ArmPoseGoal.msg
[ 76%] Built target kinova_msgs_generate_messages_nodejs
[ 76%] Generating EusLisp code from kinova_msgs/PoseVelocityWithFingerVelocity.msg
[ 76%] Generating Lisp code from kinova_msgs/ArmJointAnglesFeedback.msg
[ 76%] Generating EusLisp code from kinova_msgs/ArmPoseActionFeedback.msg
[ 76%] Generating Lisp code from kinova_msgs/Arm_KinovaPoseActionFeedback.msg
[ 76%] Generating Lisp code from kinova_msgs/ArmPoseResult.msg
[ 77%] Generating EusLisp code from kinova_msgs/Arm_KinovaPoseResult.msg
[ 78%] Generating Lisp code from kinova_msgs/ArmPoseActionResult.msg
[ 78%] Generating EusLisp code from kinova_msgs/ArmPoseFeedback.msg
[ 78%] Generating Lisp code from kinova_msgs/SetFingersPositionResult.msg
[ 78%] Generating EusLisp code from kinova_msgs/Arm_KinovaPoseFeedback.msg
[ 78%] Generating Lisp code from kinova_msgs/ArmJointAnglesGoal.msg
[ 79%] Generating Lisp code from kinova_msgs/Arm_KinovaPoseActionGoal.msg
[ 79%] Generating Lisp code from kinova_msgs/ArmJointAnglesResult.msg
[ 79%] Generating Lisp code from kinova_msgs/SetNullSpaceModeState.srv
[ 80%] Generating EusLisp code from kinova_msgs/FingerPosition.msg
[ 81%] Generating Lisp code from kinova_msgs/SetTorqueControlMode.srv
[ 81%] Generating Lisp code from kinova_msgs/Start.srv
[ 81%] Generating Lisp code from kinova_msgs/SetEndEffectorOffset.srv
[ 81%] Generating EusLisp code from kinova_msgs/ArmJointAnglesFeedback.msg
[ 81%] Generating EusLisp code from kinova_msgs/ArmPoseResult.msg
[ 81%] Generating EusLisp code from kinova_msgs/Arm_KinovaPoseActionFeedback.msg
[ 82%] Generating EusLisp code from kinova_msgs/ArmPoseActionResult.msg
[ 82%] Generating Lisp code from kinova_msgs/Stop.srv
[ 82%] Generating EusLisp code from kinova_msgs/SetFingersPositionResult.msg
[ 83%] Generating Lisp code from kinova_msgs/HomeArm.srv
[ 83%] Generating Lisp code from kinova_msgs/RunCOMParametersEstimation.srv
[ 83%] Generating EusLisp code from kinova_msgs/ArmJointAnglesGoal.msg
[ 84%] Generating EusLisp code from kinova_msgs/Arm_KinovaPoseActionGoal.msg
[ 84%] Generating Lisp code from kinova_msgs/ZeroTorques.srv
[ 84%] Generating EusLisp code from kinova_msgs/ArmJointAnglesResult.msg
[ 84%] Generating EusLisp code from kinova_msgs/SetNullSpaceModeState.srv
[ 85%] Generating EusLisp code from kinova_msgs/SetTorqueControlMode.srv
[ 86%] Generating Lisp code from kinova_msgs/ClearTrajectories.srv
[ 86%] Generating Lisp code from kinova_msgs/SetForceControlParams.srv
[ 86%] Generating Lisp code from kinova_msgs/AddPoseToCartesianTrajectory.srv
[ 87%] Generating Lisp code from kinova_msgs/SetTorqueControlParameters.srv
[ 87%] Generating EusLisp code from kinova_msgs/Start.srv
[ 87%] Generating EusLisp code from kinova_msgs/SetEndEffectorOffset.srv
[ 87%] Generating EusLisp code from kinova_msgs/Stop.srv
[ 88%] Generating EusLisp code from kinova_msgs/HomeArm.srv
[ 88%] Generating EusLisp code from kinova_msgs/RunCOMParametersEstimation.srv
[ 88%] Built target kinova_msgs_generate_messages_lisp
[ 88%] Generating EusLisp code from kinova_msgs/ZeroTorques.srv
[ 89%] Generating EusLisp code from kinova_msgs/ClearTrajectories.srv
[ 89%] Generating EusLisp code from kinova_msgs/SetForceControlParams.srv
[ 89%] Generating EusLisp code from kinova_msgs/AddPoseToCartesianTrajectory.srv
[ 90%] Generating EusLisp code from kinova_msgs/SetTorqueControlParameters.srv
[ 90%] Generating EusLisp manifest code for kinova_msgs
[ 90%] Linking CXX shared library /home/bim/catkin_ws/devel/lib/libm1n6s300_mico_arm_moveit_ikfast_plugin.so
[ 90%] Linking CXX shared library /home/bim/catkin_ws/devel/lib/libj2n6s300_arm_moveit_ikfast_plugin.so
[ 90%] Built target m1n6s300_mico_arm_moveit_ikfast_plugin
[ 90%] Built target j2n6s300_arm_moveit_ikfast_plugin
[ 90%] Built target kinova_msgs_generate_messages_eus
Scanning dependencies of target gripper_command_action_server
Scanning dependencies of target kinova_tf_updater
Scanning dependencies of target kinova_driver
Scanning dependencies of target kinova_msgs_generate_messages
Scanning dependencies of target joint_trajectory_action_server
[ 90%] Built target kinova_msgs_generate_messages
[ 90%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/joint_trajectory_action_server.dir/src/joint_trajectory_action/joint_trajectory_action_server.cpp.o
[ 90%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/gripper_command_action_server.dir/src/joint_trajectory_action/gripper_command_action_server.cpp.o
[ 90%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_tf_updater.dir/src/kinova_ros_types.cpp.o
[ 90%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_tf_updater.dir/src/nodes/kinova_tf_updater.cpp.o
[ 90%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_tf_updater.dir/src/kinova_arm_kinematics.cpp.o
[ 90%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_driver.dir/src/kinova_api.cpp.o
[ 90%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_driver.dir/src/kinova_arm.cpp.o
[ 91%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_driver.dir/src/kinova_comm.cpp.o
[ 91%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_driver.dir/src/kinova_tool_pose_action.cpp.o
[ 91%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_driver.dir/src/kinova_joint_angles_action.cpp.o
[ 92%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_driver.dir/src/kinova_fingers_action.cpp.o
[ 92%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_driver.dir/src/kinova_ros_types.cpp.o
[ 93%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_driver/kinova_tf_updater
[ 93%] Built target kinova_tf_updater
[ 93%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_driver.dir/src/kinova_joint_trajectory_controller.cpp.o
[ 93%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_driver/joint_trajectory_action_server
[ 93%] Built target joint_trajectory_action_server
[ 94%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_driver/gripper_command_action_server
[ 94%] Built target gripper_command_action_server
[ 95%] Linking CXX shared library /home/bim/catkin_ws/devel/lib/libkinova_driver.so
[ 95%] Built target kinova_driver
Scanning dependencies of target kinova_interactive_control
Scanning dependencies of target kinova_arm_driver
Scanning dependencies of target work_scene
Scanning dependencies of target motion_plan
Scanning dependencies of target pick_place
Scanning dependencies of target test_accuracy
[ 95%] Building CXX object kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo/CMakeFiles/work_scene.dir/src/work_scene.cpp.o
[ 96%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_arm_driver.dir/src/nodes/kinova_arm_driver.cpp.o
[ 96%] Building CXX object kinova-ros-noetic-devel/kinova_driver/CMakeFiles/kinova_interactive_control.dir/src/nodes/kinova_interactive_control.cpp.o
[ 97%] Building CXX object kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo/CMakeFiles/motion_plan.dir/src/motion_plan.cpp.o
[ 97%] Building CXX object kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo/CMakeFiles/pick_place.dir/src/pick_place.cpp.o
[ 97%] Building CXX object kinova-ros-noetic-devel/kinova_moveit/kinova_arm_moveit_demo/CMakeFiles/test_accuracy.dir/src/test_accuracy.cpp.o
[ 98%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_arm_moveit_demo/work_scene
[ 98%] Built target work_scene
[ 98%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_driver/kinova_arm_driver
[ 98%] Built target kinova_arm_driver
[ 98%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_arm_moveit_demo/motion_plan
[ 98%] Built target motion_plan
[ 98%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_driver/kinova_interactive_control
[ 98%] Built target kinova_interactive_control
[100%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_arm_moveit_demo/pick_place
[100%] Built target pick_place
[100%] Linking CXX executable /home/bim/catkin_ws/devel/lib/kinova_arm_moveit_demo/test_accuracy
[100%] Built target test_accuracy
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
bim@bim-Vostro-7570:~/catkin_ws$
cd kinova-ros-noetic-devel
sudo cp kinova_driver/udev/10-kinova-arm.rules /etc/udev/rules.d/
cd ../../
sudo apt-get install ros-elodic-moveit


bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ ls build devel src bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ cd src bim@bim-Vostro-7570:~/catkin_ws/src$ bim@bim-Vostro-7570:~/catkin_ws/src$ bim@bim-Vostro-7570:~/catkin_ws/src$ ls CMakeLists.txt ddynamic_reconfigure-0.4.1.tar.gz kinova-ros-noetic-devel.zip realsense-ros-2.3.2.tar.gz ddynamic_reconfigure-0.4.1 kinova-ros-noetic-devel realsense-ros-2.3.2 bim@bim-Vostro-7570:~/catkin_ws/src$ bim@bim-Vostro-7570:~/catkin_ws/src$ bim@bim-Vostro-7570:~/catkin_ws/src$ cd kinova-ros-noetic-devel bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ sudo cp kinova_driver/udev/10-kinova-arm.rules /etc/udev/rules.d/ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ bim@bim-Vostro-7570:~/catkin_ws/src/kinova-ros-noetic-devel$ cd ../../ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ ls build devel src bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-elodic-moveit Reading package lists... Done Building dependency tree Reading state information... Done E: Unable to locate package ros-elodic-moveit bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-moveit Reading package lists... Done Building dependency tree Reading state information... Done The following additional packages will be installed: python-pyassimp ros-melodic-chomp-motion-planner ros-melodic-moveit-commander ros-melodic-moveit-fake-controller-manager ros-melodic-moveit-planners ros-melodic-moveit-planners-chomp ros-melodic-moveit-planners-ompl ros-melodic-moveit-plugins ros-melodic-moveit-ros ros-melodic-moveit-ros-benchmarks ros-melodic-moveit-ros-control-interface ros-melodic-moveit-ros-robot-interaction ros-melodic-moveit-ros-visualization ros-melodic-moveit-setup-assistant ros-melodic-moveit-simple-controller-manager ros-melodic-ompl The following NEW packages will be installed: python-pyassimp ros-melodic-chomp-motion-planner ros-melodic-moveit ros-melodic-moveit-commander ros-melodic-moveit-fake-controller-manager ros-melodic-moveit-planners ros-melodic-moveit-planners-chomp ros-melodic-moveit-planners-ompl ros-melodic-moveit-plugins ros-melodic-moveit-ros ros-melodic-moveit-ros-benchmarks ros-melodic-moveit-ros-control-interface ros-melodic-moveit-ros-robot-interaction ros-melodic-moveit-ros-visualization ros-melodic-moveit-setup-assistant ros-melodic-moveit-simple-controller-manager ros-melodic-ompl 0 upgraded, 17 newly installed, 0 to remove and 35 not upgraded. Need to get 4,245 kB of archives. After this operation, 19.7 MB of additional disk space will be used. Do you want to continue? [Y/n] y Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-chomp-motion-planner amd64 1.0.11-1bionic.20230524.162930 [101 kB] Get:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-commander amd64 1.0.11-1bionic.20230524.172116 [43.2 kB] Get:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-planners-chomp amd64 1.0.11-1bionic.20230524.172107 [34.8 kB] Get:4 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-ompl amd64 1.4.2-5bionic.20191212.045602 [1,527 kB] Get:5 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-planners-ompl amd64 1.0.11-1bionic.20230524.165125 [362 kB] Get:6 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-planners amd64 1.0.11-1bionic.20230524.172437 [2,648 B] Get:7 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-fake-controller-manager amd64 1.0.11-1bionic.20230524.164523 [66.8 kB] Get:8 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-simple-controller-manager amd64 1.0.11-1bionic.20230524.162355 [161 kB] Get:9 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-control-interface amd64 1.0.11-1bionic.20230524.163633 [147 kB] Get:10 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-plugins amd64 1.0.11-1bionic.20230524.164701 [2,588 B] Get:11 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-benchmarks amd64 1.0.11-1bionic.20230524.165615 [196 kB] Get:12 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-robot-interaction amd64 1.0.11-1bionic.20230524.164056 [125 kB] Get:13 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros-visualization amd64 1.0.11-1bionic.20230524.172112 [547 kB] Get:14 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-ros amd64 1.0.11-1bionic.20230524.173722 [3,112 B] Get:15 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit-setup-assistant amd64 1.0.11-1bionic.20230524.174615 [850 kB] Get:16 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-moveit amd64 1.0.11-1bionic.20230524.175103 [9,796 B] Get:17 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 python-pyassimp all 4.1.0~dfsg-3 [65.8 kB] Fetched 4,245 kB in 0s (15.0 MB/s) Selecting previously unselected package ros-melodic-chomp-motion-planner. (Reading database ... 251577 files and directories currently installed.) Preparing to unpack .../00-ros-melodic-chomp-motion-planner_1.0.11-1bionic.20230524.162930_amd64.deb ... Unpacking ros-melodic-chomp-motion-planner (1.0.11-1bionic.20230524.162930) ... Selecting previously unselected package python-pyassimp. Preparing to unpack .../01-python-pyassimp_4.1.0~dfsg-3_all.deb ... Unpacking python-pyassimp (4.1.0~dfsg-3) ... Selecting previously unselected package ros-melodic-moveit-commander. Preparing to unpack .../02-ros-melodic-moveit-commander_1.0.11-1bionic.20230524.172116_amd64.deb ... Unpacking ros-melodic-moveit-commander (1.0.11-1bionic.20230524.172116) ... Selecting previously unselected package ros-melodic-moveit-planners-chomp. Preparing to unpack .../03-ros-melodic-moveit-planners-chomp_1.0.11-1bionic.20230524.172107_amd64.deb ... Unpacking ros-melodic-moveit-planners-chomp (1.0.11-1bionic.20230524.172107) ... Selecting previously unselected package ros-melodic-ompl. Preparing to unpack .../04-ros-melodic-ompl_1.4.2-5bionic.20191212.045602_amd64.deb ... Unpacking ros-melodic-ompl (1.4.2-5bionic.20191212.045602) ... Selecting previously unselected package ros-melodic-moveit-planners-ompl. Preparing to unpack .../05-ros-melodic-moveit-planners-ompl_1.0.11-1bionic.20230524.165125_amd64.deb ... Unpacking ros-melodic-moveit-planners-ompl (1.0.11-1bionic.20230524.165125) ... Selecting previously unselected package ros-melodic-moveit-planners. Preparing to unpack .../06-ros-melodic-moveit-planners_1.0.11-1bionic.20230524.172437_amd64.deb ... Unpacking ros-melodic-moveit-planners (1.0.11-1bionic.20230524.172437) ... Selecting previously unselected package ros-melodic-moveit-fake-controller-manager. Preparing to unpack .../07-ros-melodic-moveit-fake-controller-manager_1.0.11-1bionic.20230524.164523_amd64.deb ... Unpacking ros-melodic-moveit-fake-controller-manager (1.0.11-1bionic.20230524.164523) ... Selecting previously unselected package ros-melodic-moveit-simple-controller-manager. Preparing to unpack .../08-ros-melodic-moveit-simple-controller-manager_1.0.11-1bionic.20230524.162355_amd64.deb ... Unpacking ros-melodic-moveit-simple-controller-manager (1.0.11-1bionic.20230524.162355) ... Selecting previously unselected package ros-melodic-moveit-ros-control-interface. Preparing to unpack .../09-ros-melodic-moveit-ros-control-interface_1.0.11-1bionic.20230524.163633_amd64.deb ... Unpacking ros-melodic-moveit-ros-control-interface (1.0.11-1bionic.20230524.163633) ... Selecting previously unselected package ros-melodic-moveit-plugins. Preparing to unpack .../10-ros-melodic-moveit-plugins_1.0.11-1bionic.20230524.164701_amd64.deb ... Unpacking ros-melodic-moveit-plugins (1.0.11-1bionic.20230524.164701) ... Selecting previously unselected package ros-melodic-moveit-ros-benchmarks. Preparing to unpack .../11-ros-melodic-moveit-ros-benchmarks_1.0.11-1bionic.20230524.165615_amd64.deb ... Unpacking ros-melodic-moveit-ros-benchmarks (1.0.11-1bionic.20230524.165615) ... Selecting previously unselected package ros-melodic-moveit-ros-robot-interaction. Preparing to unpack .../12-ros-melodic-moveit-ros-robot-interaction_1.0.11-1bionic.20230524.164056_amd64.deb ... Unpacking ros-melodic-moveit-ros-robot-interaction (1.0.11-1bionic.20230524.164056) ... Selecting previously unselected package ros-melodic-moveit-ros-visualization. Preparing to unpack .../13-ros-melodic-moveit-ros-visualization_1.0.11-1bionic.20230524.172112_amd64.deb ... Unpacking ros-melodic-moveit-ros-visualization (1.0.11-1bionic.20230524.172112) ... Selecting previously unselected package ros-melodic-moveit-ros. Preparing to unpack .../14-ros-melodic-moveit-ros_1.0.11-1bionic.20230524.173722_amd64.deb ... Unpacking ros-melodic-moveit-ros (1.0.11-1bionic.20230524.173722) ... Selecting previously unselected package ros-melodic-moveit-setup-assistant. Preparing to unpack .../15-ros-melodic-moveit-setup-assistant_1.0.11-1bionic.20230524.174615_amd64.deb ... Unpacking ros-melodic-moveit-setup-assistant (1.0.11-1bionic.20230524.174615) ... Selecting previously unselected package ros-melodic-moveit. Preparing to unpack .../16-ros-melodic-moveit_1.0.11-1bionic.20230524.175103_amd64.deb ... Unpacking ros-melodic-moveit (1.0.11-1bionic.20230524.175103) ... Setting up ros-melodic-moveit-fake-controller-manager (1.0.11-1bionic.20230524.164523) ... Setting up ros-melodic-ompl (1.4.2-5bionic.20191212.045602) ... Setting up ros-melodic-chomp-motion-planner (1.0.11-1bionic.20230524.162930) ... Setting up ros-melodic-moveit-ros-benchmarks (1.0.11-1bionic.20230524.165615) ... Setting up ros-melodic-moveit-simple-controller-manager (1.0.11-1bionic.20230524.162355) ... Setting up python-pyassimp (4.1.0~dfsg-3) ... Setting up ros-melodic-moveit-planners-chomp (1.0.11-1bionic.20230524.172107) ... Setting up ros-melodic-moveit-planners-ompl (1.0.11-1bionic.20230524.165125) ... Setting up ros-melodic-moveit-ros-robot-interaction (1.0.11-1bionic.20230524.164056) ... Setting up ros-melodic-moveit-ros-control-interface (1.0.11-1bionic.20230524.163633) ... Setting up ros-melodic-moveit-commander (1.0.11-1bionic.20230524.172116) ... Setting up ros-melodic-moveit-ros-visualization (1.0.11-1bionic.20230524.172112) ... Setting up ros-melodic-moveit-planners (1.0.11-1bionic.20230524.172437) ... Setting up ros-melodic-moveit-ros (1.0.11-1bionic.20230524.173722) ... Setting up ros-melodic-moveit-plugins (1.0.11-1bionic.20230524.164701) ... Setting up ros-melodic-moveit-setup-assistant (1.0.11-1bionic.20230524.174615) ... Setting up ros-melodic-moveit (1.0.11-1bionic.20230524.175103) ... Processing triggers for libc-bin (2.27-3ubuntu1.6) ... bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
sudo apt-get install ros-melodic-trac-ik
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-trac-ik Reading package lists... Done Building dependency tree Reading state information... Done The following additional packages will be installed: libnlopt-dev libnlopt0 ros-melodic-trac-ik-examples ros-melodic-trac-ik-kinematics-plugin ros-melodic-trac-ik-lib ros-melodic-trac-ik-python swig swig3.0 Suggested packages: swig-doc swig-examples swig3.0-examples swig3.0-doc The following NEW packages will be installed: libnlopt-dev libnlopt0 ros-melodic-trac-ik ros-melodic-trac-ik-examples ros-melodic-trac-ik-kinematics-plugin ros-melodic-trac-ik-lib ros-melodic-trac-ik-python swig swig3.0 0 upgraded, 9 newly installed, 0 to remove and 35 not upgraded. Need to get 1,691 kB of archives. After this operation, 7,913 kB of additional disk space will be used. Do you want to continue? [Y/n] y Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-trac-ik-lib amd64 1.5.1-1bionic.20221025.185147 [94.1 kB] Get:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-trac-ik-examples amd64 1.5.1-1bionic.20230524.155531 [23.6 kB] Get:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-trac-ik-kinematics-plugin amd64 1.5.1-1bionic.20230524.162115 [37.9 kB] Get:4 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-trac-ik-python amd64 1.5.1-1bionic.20221025.205709 [96.7 kB] Get:5 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-trac-ik amd64 1.5.1-1bionic.20230524.162948 [4,380 B] Get:6 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 swig3.0 amd64 3.0.12-1 [1,094 kB] Get:7 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 swig amd64 3.0.12-1 [6,460 B] Get:8 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libnlopt0 amd64 2.4.2+dfsg-4 [162 kB] Get:9 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libnlopt-dev amd64 2.4.2+dfsg-4 [172 kB] Fetched 1,691 kB in 2s (761 kB/s) Selecting previously unselected package swig3.0. (Reading database ... 252291 files and directories currently installed.) Preparing to unpack .../0-swig3.0_3.0.12-1_amd64.deb ... Unpacking swig3.0 (3.0.12-1) ... Selecting previously unselected package swig. Preparing to unpack .../1-swig_3.0.12-1_amd64.deb ... Unpacking swig (3.0.12-1) ... Selecting previously unselected package libnlopt0:amd64. Preparing to unpack .../2-libnlopt0_2.4.2+dfsg-4_amd64.deb ... Unpacking libnlopt0:amd64 (2.4.2+dfsg-4) ... Selecting previously unselected package libnlopt-dev:amd64. Preparing to unpack .../3-libnlopt-dev_2.4.2+dfsg-4_amd64.deb ... Unpacking libnlopt-dev:amd64 (2.4.2+dfsg-4) ... Selecting previously unselected package ros-melodic-trac-ik-lib. Preparing to unpack .../4-ros-melodic-trac-ik-lib_1.5.1-1bionic.20221025.185147_amd64.deb ... Unpacking ros-melodic-trac-ik-lib (1.5.1-1bionic.20221025.185147) ... Selecting previously unselected package ros-melodic-trac-ik-examples. Preparing to unpack .../5-ros-melodic-trac-ik-examples_1.5.1-1bionic.20230524.155531_amd64.deb ... Unpacking ros-melodic-trac-ik-examples (1.5.1-1bionic.20230524.155531) ... Selecting previously unselected package ros-melodic-trac-ik-kinematics-plugin. Preparing to unpack .../6-ros-melodic-trac-ik-kinematics-plugin_1.5.1-1bionic.20230524.162115_amd64.deb ... Unpacking ros-melodic-trac-ik-kinematics-plugin (1.5.1-1bionic.20230524.162115) ... Selecting previously unselected package ros-melodic-trac-ik-python. Preparing to unpack .../7-ros-melodic-trac-ik-python_1.5.1-1bionic.20221025.205709_amd64.deb ... Unpacking ros-melodic-trac-ik-python (1.5.1-1bionic.20221025.205709) ... Selecting previously unselected package ros-melodic-trac-ik. Preparing to unpack .../8-ros-melodic-trac-ik_1.5.1-1bionic.20230524.162948_amd64.deb ... Unpacking ros-melodic-trac-ik (1.5.1-1bionic.20230524.162948) ... Setting up swig3.0 (3.0.12-1) ... Setting up libnlopt0:amd64 (2.4.2+dfsg-4) ... Setting up swig (3.0.12-1) ... Setting up libnlopt-dev:amd64 (2.4.2+dfsg-4) ... Setting up ros-melodic-trac-ik-lib (1.5.1-1bionic.20221025.185147) ... Setting up ros-melodic-trac-ik-python (1.5.1-1bionic.20221025.205709) ... Setting up ros-melodic-trac-ik-examples (1.5.1-1bionic.20230524.155531) ... Setting up ros-melodic-trac-ik-kinematics-plugin (1.5.1-1bionic.20230524.162115) ... Setting up ros-melodic-trac-ik (1.5.1-1bionic.20230524.162948) ... Processing triggers for man-db (2.8.3-2ubuntu0.1) ... Processing triggers for libc-bin (2.27-3ubuntu1.6) ... bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
==========visip====================
sudo apt-get install ros-melodic-visp
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ sudo apt-get install ros-melodic-visp Reading package lists... Done Building dependency tree Reading state information... Done The following additional packages will be installed: libcoin80-dev libcoin80v5 libdjvulibre-dev libdmtx-dev libdmtx0a liblcms2-dev liblqr-1-0-dev libmagick++-6-headers libmagick++-6.q16-7 libmagick++-6.q16-dev libmagick++-dev libmagickcore-6-arch-config libmagickcore-6-headers libmagickcore-6.q16-dev libmagickwand-6-headers libmagickwand-6.q16-dev libois-1.3.0v5 libois-dev librsvg2-dev libv4l-dev libv4l2rds0 libwmf-dev libxpm-dev libzbar-dev libzbar0 Suggested packages: libcoin80-doc libopenal0a libsimage-dev librsvg2-doc libwmf-doc The following NEW packages will be installed: libcoin80-dev libcoin80v5 libdjvulibre-dev libdmtx-dev libdmtx0a liblcms2-dev liblqr-1-0-dev libmagick++-6-headers libmagick++-6.q16-7 libmagick++-6.q16-dev libmagick++-dev libmagickcore-6-arch-config libmagickcore-6-headers libmagickcore-6.q16-dev libmagickwand-6-headers libmagickwand-6.q16-dev libois-1.3.0v5 libois-dev librsvg2-dev libv4l-dev libv4l2rds0 libwmf-dev libxpm-dev libzbar-dev libzbar0 ros-melodic-visp 0 upgraded, 26 newly installed, 0 to remove and 35 not upgraded. Need to get 22.2 MB of archives. After this operation, 78.2 MB of additional disk space will be used. Do you want to continue? [Y/n] y Get:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main amd64 ros-melodic-visp amd64 3.5.0-3bionic.20220216.093605 [3,007 kB] Get:2 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libdmtx0a amd64 0.7.4-2 [49.3 kB] Get:3 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagickcore-6-arch-config amd64 8:6.9.7.4+dfsg-16ubuntu6.15 [25.2 kB] Get:4 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagickcore-6-headers all 8:6.9.7.4+dfsg-16ubuntu6.15 [47.2 kB] Get:5 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagickwand-6-headers all 8:6.9.7.4+dfsg-16ubuntu6.15 [10.6 kB] Get:6 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagick++-6-headers all 8:6.9.7.4+dfsg-16ubuntu6.15 [47.2 kB] Get:7 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagick++-6.q16-7 amd64 8:6.9.7.4+dfsg-16ubuntu6.15 [139 kB] Get:8 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libdjvulibre-dev amd64 3.5.27.1-8ubuntu0.4 [2,382 kB] Get:9 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 liblcms2-dev amd64 2.9-1ubuntu0.1 [9,096 kB] Get:10 http://mirrors.aliyun.com/ubuntu bionic/main amd64 liblqr-1-0-dev amd64 0.4.2-2.1 [69.1 kB] Get:11 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 librsvg2-dev amd64 2.40.20-2ubuntu0.2 [10.7 kB] Get:12 http://mirrors.aliyun.com/ubuntu bionic/main amd64 libwmf-dev amd64 0.2.8.4-12 [172 kB] Get:13 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagickcore-6.q16-dev amd64 8:6.9.7.4+dfsg-16ubuntu6.15 [975 kB] Get:14 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagickwand-6.q16-dev amd64 8:6.9.7.4+dfsg-16ubuntu6.15 [290 kB] Get:15 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagick++-6.q16-dev amd64 8:6.9.7.4+dfsg-16ubuntu6.15 [119 kB] Get:16 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libmagick++-dev all 8:6.9.7.4+dfsg-16ubuntu6.15 [1,408 B] Get:17 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libcoin80v5 amd64 3.1.4~abc9f50+dfsg3-2 [2,380 kB] Get:18 http://mirrors.aliyun.com/ubuntu bionic-security/main amd64 libxpm-dev amd64 1:3.5.12-1ubuntu0.18.04.2 [88.1 kB] Get:19 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libcoin80-dev amd64 3.1.4~abc9f50+dfsg3-2 [2,858 kB] Get:20 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libdmtx-dev amd64 0.7.4-2 [46.4 kB] Get:21 http://mirrors.aliyun.com/ubuntu bionic/main amd64 libv4l2rds0 amd64 1.14.2-1 [15.6 kB] Get:22 http://mirrors.aliyun.com/ubuntu bionic/main amd64 libv4l-dev amd64 1.14.2-1 [107 kB] Get:23 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libzbar0 amd64 0.10+doc-10.1build2 [75.7 kB] Get:24 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libzbar-dev amd64 0.10+doc-10.1build2 [97.3 kB] Get:25 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libois-1.3.0v5 amd64 1.3.0+dfsg0-6 [44.1 kB] Get:26 http://mirrors.aliyun.com/ubuntu bionic/universe amd64 libois-dev amd64 1.3.0+dfsg0-6 [78.2 kB] Fetched 22.2 MB in 9s (2,384 kB/s) Selecting previously unselected package libdmtx0a:amd64. (Reading database ... 253161 files and directories currently installed.) Preparing to unpack .../00-libdmtx0a_0.7.4-2_amd64.deb ... Unpacking libdmtx0a:amd64 (0.7.4-2) ... Selecting previously unselected package libmagickcore-6-arch-config:amd64. Preparing to unpack .../01-libmagickcore-6-arch-config_8%3a6.9.7.4+dfsg-16ubuntu6.15_amd64.deb ... Unpacking libmagickcore-6-arch-config:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libmagickcore-6-headers. Preparing to unpack .../02-libmagickcore-6-headers_8%3a6.9.7.4+dfsg-16ubuntu6.15_all.deb ... Unpacking libmagickcore-6-headers (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libmagickwand-6-headers. Preparing to unpack .../03-libmagickwand-6-headers_8%3a6.9.7.4+dfsg-16ubuntu6.15_all.deb ... Unpacking libmagickwand-6-headers (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libmagick++-6-headers. Preparing to unpack .../04-libmagick++-6-headers_8%3a6.9.7.4+dfsg-16ubuntu6.15_all.deb ... Unpacking libmagick++-6-headers (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libmagick++-6.q16-7:amd64. Preparing to unpack .../05-libmagick++-6.q16-7_8%3a6.9.7.4+dfsg-16ubuntu6.15_amd64.deb ... Unpacking libmagick++-6.q16-7:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libdjvulibre-dev:amd64. Preparing to unpack .../06-libdjvulibre-dev_3.5.27.1-8ubuntu0.4_amd64.deb ... Unpacking libdjvulibre-dev:amd64 (3.5.27.1-8ubuntu0.4) ... Selecting previously unselected package liblcms2-dev:amd64. Preparing to unpack .../07-liblcms2-dev_2.9-1ubuntu0.1_amd64.deb ... Unpacking liblcms2-dev:amd64 (2.9-1ubuntu0.1) ... Selecting previously unselected package liblqr-1-0-dev:amd64. Preparing to unpack .../08-liblqr-1-0-dev_0.4.2-2.1_amd64.deb ... Unpacking liblqr-1-0-dev:amd64 (0.4.2-2.1) ... Selecting previously unselected package librsvg2-dev:amd64. Preparing to unpack .../09-librsvg2-dev_2.40.20-2ubuntu0.2_amd64.deb ... Unpacking librsvg2-dev:amd64 (2.40.20-2ubuntu0.2) ... Selecting previously unselected package libwmf-dev. Preparing to unpack .../10-libwmf-dev_0.2.8.4-12_amd64.deb ... Unpacking libwmf-dev (0.2.8.4-12) ... Selecting previously unselected package libmagickcore-6.q16-dev:amd64. Preparing to unpack .../11-libmagickcore-6.q16-dev_8%3a6.9.7.4+dfsg-16ubuntu6.15_amd64.deb ... Unpacking libmagickcore-6.q16-dev:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libmagickwand-6.q16-dev:amd64. Preparing to unpack .../12-libmagickwand-6.q16-dev_8%3a6.9.7.4+dfsg-16ubuntu6.15_amd64.deb ... Unpacking libmagickwand-6.q16-dev:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libmagick++-6.q16-dev:amd64. Preparing to unpack .../13-libmagick++-6.q16-dev_8%3a6.9.7.4+dfsg-16ubuntu6.15_amd64.deb ... Unpacking libmagick++-6.q16-dev:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libmagick++-dev. Preparing to unpack .../14-libmagick++-dev_8%3a6.9.7.4+dfsg-16ubuntu6.15_all.deb ... Unpacking libmagick++-dev (8:6.9.7.4+dfsg-16ubuntu6.15) ... Selecting previously unselected package libcoin80v5. Preparing to unpack .../15-libcoin80v5_3.1.4~abc9f50+dfsg3-2_amd64.deb ... Unpacking libcoin80v5 (3.1.4~abc9f50+dfsg3-2) ... Selecting previously unselected package libxpm-dev:amd64. Preparing to unpack .../16-libxpm-dev_1%3a3.5.12-1ubuntu0.18.04.2_amd64.deb ... Unpacking libxpm-dev:amd64 (1:3.5.12-1ubuntu0.18.04.2) ... Selecting previously unselected package libcoin80-dev. Preparing to unpack .../17-libcoin80-dev_3.1.4~abc9f50+dfsg3-2_amd64.deb ... Unpacking libcoin80-dev (3.1.4~abc9f50+dfsg3-2) ... Selecting previously unselected package libdmtx-dev:amd64. Preparing to unpack .../18-libdmtx-dev_0.7.4-2_amd64.deb ... Unpacking libdmtx-dev:amd64 (0.7.4-2) ... Selecting previously unselected package libv4l2rds0:amd64. Preparing to unpack .../19-libv4l2rds0_1.14.2-1_amd64.deb ... Unpacking libv4l2rds0:amd64 (1.14.2-1) ... Selecting previously unselected package libv4l-dev:amd64. Preparing to unpack .../20-libv4l-dev_1.14.2-1_amd64.deb ... Unpacking libv4l-dev:amd64 (1.14.2-1) ... Selecting previously unselected package libzbar0:amd64. Preparing to unpack .../21-libzbar0_0.10+doc-10.1build2_amd64.deb ... Unpacking libzbar0:amd64 (0.10+doc-10.1build2) ... Selecting previously unselected package libzbar-dev:amd64. Preparing to unpack .../22-libzbar-dev_0.10+doc-10.1build2_amd64.deb ... Unpacking libzbar-dev:amd64 (0.10+doc-10.1build2) ... Selecting previously unselected package libois-1.3.0v5:amd64. Preparing to unpack .../23-libois-1.3.0v5_1.3.0+dfsg0-6_amd64.deb ... Unpacking libois-1.3.0v5:amd64 (1.3.0+dfsg0-6) ... Selecting previously unselected package libois-dev:amd64. Preparing to unpack .../24-libois-dev_1.3.0+dfsg0-6_amd64.deb ... Unpacking libois-dev:amd64 (1.3.0+dfsg0-6) ... Selecting previously unselected package ros-melodic-visp. Preparing to unpack .../25-ros-melodic-visp_3.5.0-3bionic.20220216.093605_amd64.deb ... Unpacking ros-melodic-visp (3.5.0-3bionic.20220216.093605) ... Setting up libdmtx0a:amd64 (0.7.4-2) ... Setting up libwmf-dev (0.2.8.4-12) ... Setting up libois-1.3.0v5:amd64 (1.3.0+dfsg0-6) ... Setting up libv4l2rds0:amd64 (1.14.2-1) ... Setting up liblqr-1-0-dev:amd64 (0.4.2-2.1) ... Setting up liblcms2-dev:amd64 (2.9-1ubuntu0.1) ... Setting up libzbar0:amd64 (0.10+doc-10.1build2) ... Setting up libdjvulibre-dev:amd64 (3.5.27.1-8ubuntu0.4) ... Setting up libxpm-dev:amd64 (1:3.5.12-1ubuntu0.18.04.2) ... Setting up libmagickcore-6-arch-config:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up librsvg2-dev:amd64 (2.40.20-2ubuntu0.2) ... Setting up libmagick++-6.q16-7:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up libcoin80v5 (3.1.4~abc9f50+dfsg3-2) ... Setting up libdmtx-dev:amd64 (0.7.4-2) ... Setting up libmagickcore-6-headers (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up libv4l-dev:amd64 (1.14.2-1) ... Setting up libois-dev:amd64 (1.3.0+dfsg0-6) ... Setting up libcoin80-dev (3.1.4~abc9f50+dfsg3-2) ... Setting up libmagickwand-6-headers (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up libmagickcore-6.q16-dev:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up libmagick++-6-headers (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up libmagickwand-6.q16-dev:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up libmagick++-6.q16-dev:amd64 (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up libmagick++-dev (8:6.9.7.4+dfsg-16ubuntu6.15) ... Setting up libzbar-dev:amd64 (0.10+doc-10.1build2) ... Setting up ros-melodic-visp (3.5.0-3bionic.20220216.093605) ... Processing triggers for man-db (2.8.3-2ubuntu0.1) ... Processing triggers for libc-bin (2.27-3ubuntu1.6) ... bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
roslaunch src/kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2s7s300_moveit_config/launch/j2s7s300_demo.launch
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ roslaunch src/kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2s7s300_moveit_config/launch/j2s7s300_demo.launch ... logging to /home/bim/.ros/log/bff1d8b2-bbfd-11ee-a111-e470b83aa6e2/roslaunch-bim-Vostro-7570-6775.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. Resource not found: The following package was not found in <arg default="$(find j2s7s300_moveit_config)/default_warehouse_mongo_db" name="db_path"/>: j2s7s300_moveit_config ROS path [0]=/opt/ros/melodic/share/ros ROS path [1]=/opt/ros/melodic/share The traceback for the exception was written to the log file bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$
source ~/.bashrc
vim ~/.bashrc ********************
export ROS_HOSTNAME=localhost
export ROS_MASTER_URL=http://localhost:11311
source /opt/ros/melodic/setup.bash source ~/catkin_ws/devel/setup.bash
source ~/.bashrc
1: roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=j2s7s300
2: roslaunch src/kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2s7s300_moveit_config/launch/j2s7s300_demo.launch
bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ bim@bim-Vostro-7570:~/catkin_ws$ roslaunch src/kinova-ros-noetic-devel/kinova_moveit/robot_configs/j2s7s300_moveit_config/launch/j2s7s300_demo.launch ... logging to /home/bim/.ros/log/bff1d8b2-bbfd-11ee-a111-e470b83aa6e2/roslaunch-bim-Vostro-7570-9067.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://localhost:37427/ SUMMARY ======== PARAMETERS * /controller_list: [{'default': True... * /move_group/allow_trajectory_execution: True * /move_group/allowed_execution_duration_scaling: 1.2 * /move_group/allowed_goal_duration_margin: 0.5 * /move_group/arm/planner_configs: ['SBLkConfigDefau... * /move_group/capabilities: move_group/MoveGr... * /move_group/controller_list: [{'default': True... * /move_group/gripper/planner_configs: ['SBLkConfigDefau... * /move_group/jiggle_fraction: 0.05 * /move_group/max_range: 5.0 * /move_group/max_safe_path_cost: 1 * /move_group/moveit_controller_manager: moveit_simple_con... * /move_group/moveit_manage_controllers: True * /move_group/octomap_resolution: 0.025 * /move_group/planner_configs/BKPIECEkConfigDefault/border_fraction: 0.9 * /move_group/planner_configs/BKPIECEkConfigDefault/failed_expansion_score_factor: 0.5 * /move_group/planner_configs/BKPIECEkConfigDefault/min_valid_path_fraction: 0.5 * /move_group/planner_configs/BKPIECEkConfigDefault/range: 0.0 * /move_group/planner_configs/BKPIECEkConfigDefault/type: geometric::BKPIECE * /move_group/planner_configs/ESTkConfigDefault/goal_bias: 0.05 * /move_group/planner_configs/ESTkConfigDefault/range: 0.0 * /move_group/planner_configs/ESTkConfigDefault/type: geometric::EST * /move_group/planner_configs/KPIECEkConfigDefault/border_fraction: 0.9 * /move_group/planner_configs/KPIECEkConfigDefault/failed_expansion_score_factor: 0.5 * /move_group/planner_configs/KPIECEkConfigDefault/goal_bias: 0.05 * /move_group/planner_configs/KPIECEkConfigDefault/min_valid_path_fraction: 0.5 * /move_group/planner_configs/KPIECEkConfigDefault/range: 0.0 * /move_group/planner_configs/KPIECEkConfigDefault/type: geometric::KPIECE * /move_group/planner_configs/LBKPIECEkConfigDefault/border_fraction: 0.9 * /move_group/planner_configs/LBKPIECEkConfigDefault/min_valid_path_fraction: 0.5 * /move_group/planner_configs/LBKPIECEkConfigDefault/range: 0.0 * /move_group/planner_configs/LBKPIECEkConfigDefault/type: geometric::LBKPIECE * /move_group/planner_configs/PRMkConfigDefault/max_nearest_neighbors: 10 * /move_group/planner_configs/PRMkConfigDefault/type: geometric::PRM * /move_group/planner_configs/PRMstarkConfigDefault/type: geometric::PRMstar * /move_group/planner_configs/RRTConnectkConfigDefault/range: 0.0 * /move_group/planner_configs/RRTConnectkConfigDefault/type: geometric::RRTCon... * /move_group/planner_configs/RRTkConfigDefault/goal_bias: 0.05 * /move_group/planner_configs/RRTkConfigDefault/range: 0.0 * /move_group/planner_configs/RRTkConfigDefault/type: geometric::RRT * /move_group/planner_configs/RRTstarkConfigDefault/delay_collision_checking: 1 * /move_group/planner_configs/RRTstarkConfigDefault/goal_bias: 0.05 * /move_group/planner_configs/RRTstarkConfigDefault/range: 0.0 * /move_group/planner_configs/RRTstarkConfigDefault/type: geometric::RRTstar * /move_group/planner_configs/SBLkConfigDefault/range: 0.0 * /move_group/planner_configs/SBLkConfigDefault/type: geometric::SBL * /move_group/planner_configs/TRRTkConfigDefault/frountierNodeRatio: 0.1 * /move_group/planner_configs/TRRTkConfigDefault/frountier_threshold: 0.0 * /move_group/planner_configs/TRRTkConfigDefault/goal_bias: 0.05 * /move_group/planner_configs/TRRTkConfigDefault/init_temperature: 10e-6 * /move_group/planner_configs/TRRTkConfigDefault/k_constant: 0.0 * /move_group/planner_configs/TRRTkConfigDefault/max_states_failed: 10 * /move_group/planner_configs/TRRTkConfigDefault/min_temperature: 10e-10 * /move_group/planner_configs/TRRTkConfigDefault/range: 0.0 * /move_group/planner_configs/TRRTkConfigDefault/temp_change_factor: 2.0 * /move_group/planner_configs/TRRTkConfigDefault/type: geometric::TRRT * /move_group/planning_plugin: ompl_interface/OM... * /move_group/planning_scene_monitor/publish_geometry_updates: True * /move_group/planning_scene_monitor/publish_planning_scene: True * /move_group/planning_scene_monitor/publish_state_updates: True * /move_group/planning_scene_monitor/publish_transforms_updates: True * /move_group/request_adapters: default_planner_r... * /move_group/start_state_max_bounds_error: 0.1 * /move_group/trajectory_execution/execution_duration_monitoring: False * /pick_place_demo/arm/kinematics_solver_timeout: 0.05 * /pick_place_demo/arm/solve_type: Manipulation2 * /robot_description: <?xml version="1.... * /robot_description_kinematics/arm/kinematics_solver: trac_ik_kinematic... * /robot_description_kinematics/arm/kinematics_solver_attempts: 3 * /robot_description_kinematics/arm/kinematics_solver_search_resolution: 0.005 * /robot_description_kinematics/arm/kinematics_solver_timeout: 0.005 * /robot_description_planning/default_acceleration_scaling_factor: 1 * /robot_description_planning/default_velocity_scaling_factor: 1 * /robot_description_planning/joint_limits/j2s7s300_joint_1/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_1/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_1/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_1/max_velocity: 0.35 * /robot_description_planning/joint_limits/j2s7s300_joint_2/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_2/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_2/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_2/max_velocity: 0.35 * /robot_description_planning/joint_limits/j2s7s300_joint_3/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_3/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_3/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_3/max_velocity: 0.35 * /robot_description_planning/joint_limits/j2s7s300_joint_4/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_4/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_4/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_4/max_velocity: 0.35 * /robot_description_planning/joint_limits/j2s7s300_joint_5/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_5/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_5/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_5/max_velocity: 0.35 * /robot_description_planning/joint_limits/j2s7s300_joint_6/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_6/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_6/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_6/max_velocity: 0.35 * /robot_description_planning/joint_limits/j2s7s300_joint_7/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_7/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_7/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_7/max_velocity: 0.35 * /robot_description_planning/joint_limits/j2s7s300_joint_finger_1/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_finger_1/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_finger_1/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_finger_1/max_velocity: 5 * /robot_description_planning/joint_limits/j2s7s300_joint_finger_2/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_finger_2/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_finger_2/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_finger_2/max_velocity: 5 * /robot_description_planning/joint_limits/j2s7s300_joint_finger_3/has_acceleration_limits: False * /robot_description_planning/joint_limits/j2s7s300_joint_finger_3/has_velocity_limits: True * /robot_description_planning/joint_limits/j2s7s300_joint_finger_3/max_acceleration: 0 * /robot_description_planning/joint_limits/j2s7s300_joint_finger_3/max_velocity: 5 * /robot_description_semantic: <?xml version="1.... * /robot_type: j2s7s300 * /rosdistro: melodic * /rosversion: 1.14.13 * /rviz_bim_Vostro_7570_9067_5512380311456965167/arm/kinematics_solver: trac_ik_kinematic... * /rviz_bim_Vostro_7570_9067_5512380311456965167/arm/kinematics_solver_attempts: 3 * /rviz_bim_Vostro_7570_9067_5512380311456965167/arm/kinematics_solver_search_resolution: 0.005 * /rviz_bim_Vostro_7570_9067_5512380311456965167/arm/kinematics_solver_timeout: 0.005 NODES / j2s7s300_gripper_command_action_server (kinova_driver/gripper_command_action_server) j2s7s300_joint_trajectory_action_server (kinova_driver/joint_trajectory_action_server) move_group (moveit_ros_move_group/move_group) rviz_bim_Vostro_7570_9067_5512380311456965167 (rviz/rviz) ROS_MASTER_URI=http://localhost:11311 process[j2s7s300_joint_trajectory_action_server-1]: started with pid [9137] process[j2s7s300_gripper_command_action_server-2]: started with pid [9138] process[move_group-3]: started with pid [9152] process[rviz_bim_Vostro_7570_9067_5512380311456965167-4]: started with pid [9179] [ INFO] [1706241067.901161703]: Loading robot model 'j2s7s300'... [ WARN] [1706241067.902466732]: Skipping virtual joint 'world_to_base_virtual_joint' because its child frame 'root' does not match the URDF frame 'world' [ INFO] [1706241067.902505017]: No root/virtual joint specified in SRDF. Assuming fixed joint [ INFO] [1706241067.974624518]: rviz version 1.13.30 [ INFO] [1706241067.974675509]: compiled against Qt version 5.9.5 [ INFO] [1706241067.974691300]: compiled against OGRE version 1.9.0 (Ghadamon) [ INFO] [1706241067.979934417]: Forcing OpenGl version 0. [ WARN] [1706241068.163142905]: Kinematics solver doesn't support #attempts anymore, but only a timeout. Please remove the parameter '/robot_description_kinematics/arm/kinematics_solver_attempts' from your configuration. [ INFO] [1706241068.164314587]: Gripper_command__action_server receive feedback of trajectory state from topic: /trajectory_controller/state [ WARN] [1706241068.176011832]: IK plugin for group 'arm' relies on deprecated API. Please implement initialize(RobotModel, ...). [ INFO] [1706241068.183930418]: IK Using joint j2s7s300_link_1 -3.40282e+38 3.40282e+38 [ INFO] [1706241068.183970668]: IK Using joint j2s7s300_link_2 0.820305 5.46288 [ INFO] [1706241068.183996662]: IK Using joint j2s7s300_link_3 -3.40282e+38 3.40282e+38 [ INFO] [1706241068.184018426]: IK Using joint j2s7s300_link_4 0.523599 5.75959 [ INFO] [1706241068.184041525]: IK Using joint j2s7s300_link_5 -3.40282e+38 3.40282e+38 [ INFO] [1706241068.184062692]: IK Using joint j2s7s300_link_6 1.13446 5.14872 [ INFO] [1706241068.184085257]: IK Using joint j2s7s300_link_7 -3.40282e+38 3.40282e+38 [ INFO] [1706241068.184116805]: Looking in common namespaces for param name: arm/position_only_ik [ INFO] [1706241068.187386681]: Looking in common namespaces for param name: arm/solve_type [ INFO] [1706241068.191141144]: Using solve type Speed [ INFO] [1706241068.191818908]: Start Gripper_Command_Trajectory_Action server! [ INFO] [1706241068.204276804]: Joint_trajectory_action_server receive feedback of trajectory state from topic: /trajectory_controller/state [ INFO] [1706241068.274652739]: Start Follow_Joint_Trajectory_Action server! [ INFO] [1706241068.274685531]: Waiting for an plan execution (goal) from Moveit [ INFO] [1706241068.522548727]: Stereo is NOT SUPPORTED [ INFO] [1706241068.522659246]: OpenGL device: Mesa DRI Intel(R) HD Graphics 630 (Kaby Lake GT2) [ INFO] [1706241068.522696246]: OpenGl version: 3.0 (GLSL 1.3). [ INFO] [1706241068.570419467]: Publishing maintained planning scene on 'monitored_planning_scene' [ INFO] [1706241068.573494068]: MoveGroup debug mode is ON Starting planning scene monitors... [ INFO] [1706241068.573568073]: Starting planning scene monitor [ INFO] [1706241068.576352163]: Listening to '/planning_scene' [ INFO] [1706241068.576385084]: Starting world geometry update monitor for collision objects, attached objects, octomap updates. [ INFO] [1706241068.579193423]: Listening to '/collision_object' [ INFO] [1706241068.582784563]: Listening to '/planning_scene_world' for planning scene world geometry [ INFO] [1706241068.583920610]: No 3D sensor plugin(s) defined for octomap updates [ INFO] [1706241068.897302988]: Listening to '/attached_collision_object' for attached collision objects Planning scene monitors started. [ INFO] [1706241068.921993431]: Initializing OMPL interface using ROS parameters [ INFO] [1706241068.953475914]: Using planning interface 'OMPL' [ INFO] [1706241068.958133741]: Param 'default_workspace_bounds' was not set. Using default value: 10 [ INFO] [1706241068.959242146]: Param 'start_state_max_bounds_error' was set to 0.1 [ INFO] [1706241068.959848283]: Param 'start_state_max_dt' was not set. Using default value: 0.5 [ INFO] [1706241068.960866349]: Param 'start_state_max_dt' was not set. Using default value: 0.5 [ INFO] [1706241068.961364000]: Param 'jiggle_fraction' was set to 0.05 [ INFO] [1706241068.961864999]: Param 'max_sampling_attempts' was not set. Using default value: 100 [ INFO] [1706241068.961922749]: Using planning request adapter 'Add Time Parameterization' [ INFO] [1706241068.961957213]: Using planning request adapter 'Fix Workspace Bounds' [ INFO] [1706241068.961983668]: Using planning request adapter 'Fix Start State Bounds' [ INFO] [1706241068.962012612]: Using planning request adapter 'Fix Start State In Collision' [ INFO] [1706241068.962039736]: Using planning request adapter 'Fix Start State Path Constraints' [ INFO] [1706241069.243291106]: Added FollowJointTrajectory controller for j2s7s300 [ INFO] [1706241069.547815872]: Added GripperCommand controller for j2s7s300_gripper [ INFO] [1706241069.548066375]: Returned 2 controllers in list [ INFO] [1706241069.613304267]: Trajectory execution is managing controllers Loading 'move_group/ApplyPlanningSceneService'... Loading 'move_group/ClearOctomapService'... Loading 'move_group/MoveGroupCartesianPathService'... Loading 'move_group/MoveGroupExecuteTrajectoryAction'... Loading 'move_group/MoveGroupGetPlanningSceneService'... Loading 'move_group/MoveGroupKinematicsService'... Loading 'move_group/MoveGroupMoveAction'... Loading 'move_group/MoveGroupPickPlaceAction'... Loading 'move_group/MoveGroupPlanService'... Loading 'move_group/MoveGroupQueryPlannersService'... Loading 'move_group/MoveGroupStateValidationService'... [ INFO] [1706241069.808529165]: ******************************************************** * MoveGroup using: * - ApplyPlanningSceneService * - ClearOctomapService * - CartesianPathService * - ExecuteTrajectoryAction * - GetPlanningSceneService * - KinematicsService * - MoveAction * - PickPlaceAction * - MotionPlanService * - QueryPlannersService * - StateValidationService ******************************************************** [ INFO] [1706241069.808637726]: MoveGroup context using planning plugin ompl_interface/OMPLPlanner [ INFO] [1706241069.808698547]: MoveGroup context initialization complete You can start planning now! [ INFO] [1706241071.892195299]: Loading robot model 'j2s7s300'... [ WARN] [1706241071.892299160]: Skipping virtual joint 'world_to_base_virtual_joint' because its child frame 'root' does not match the URDF frame 'world' [ INFO] [1706241071.892371410]: No root/virtual joint specified in SRDF. Assuming fixed joint [ WARN] [1706241072.161268825]: Kinematics solver doesn't support #attempts anymore, but only a timeout. Please remove the parameter '/rviz_bim_Vostro_7570_9067_5512380311456965167/arm/kinematics_solver_attempts' from your configuration. [ WARN] [1706241072.175007911]: IK plugin for group 'arm' relies on deprecated API. Please implement initialize(RobotModel, ...). [ INFO] [1706241072.181265712]: IK Using joint j2s7s300_link_1 -3.40282e+38 3.40282e+38 [ INFO] [1706241072.181307724]: IK Using joint j2s7s300_link_2 0.820305 5.46288 [ INFO] [1706241072.181342509]: IK Using joint j2s7s300_link_3 -3.40282e+38 3.40282e+38 [ INFO] [1706241072.181369687]: IK Using joint j2s7s300_link_4 0.523599 5.75959 [ INFO] [1706241072.181394092]: IK Using joint j2s7s300_link_5 -3.40282e+38 3.40282e+38 [ INFO] [1706241072.181411859]: IK Using joint j2s7s300_link_6 1.13446 5.14872 [ INFO] [1706241072.181436949]: IK Using joint j2s7s300_link_7 -3.40282e+38 3.40282e+38 [ INFO] [1706241072.181464770]: Looking in common namespaces for param name: arm/position_only_ik [ INFO] [1706241072.183764733]: Looking in common namespaces for param name: arm/solve_type [ INFO] [1706241072.185980633]: Using solve type Speed [ INFO] [1706241072.610145611]: Starting planning scene monitor [ INFO] [1706241072.613775273]: Listening to '/move_group/monitored_planning_scene' [ INFO] [1706241072.863332648]: Constructing new MoveGroup connection for group 'arm' in namespace '' [ INFO] [1706241073.982761772]: Ready to take commands for planning group arm. [ INFO] [1706241073.983342438]: Looking around: no [ INFO] [1706241073.983639422]: Replanning: no [ INFO] [1706241098.956812807]: Combined planning and execution request received for MoveGroup action. Forwarding to planning and execution pipeline. [ INFO] [1706241098.957088566]: Planning attempt 1 of at most 1 [ INFO] [1706241098.958931706]: Planner configuration 'arm' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed. [ INFO] [1706241098.960068418]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.960155365]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.960284967]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.960328324]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.971665156]: RRTConnect: Created 4 states (2 start + 2 goal) [ INFO] [1706241098.971768002]: RRTConnect: Created 4 states (2 start + 2 goal) [ INFO] [1706241098.971810909]: RRTConnect: Created 4 states (2 start + 2 goal) [ INFO] [1706241098.971849215]: RRTConnect: Created 4 states (2 start + 2 goal) [ INFO] [1706241098.972003143]: ParallelPlan::solve(): Solution found by one or more threads in 0.012411 seconds [ INFO] [1706241098.972221389]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.972273133]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.972352650]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.973483524]: RRTConnect: Created 4 states (2 start + 2 goal) [ INFO] [1706241098.973647920]: RRTConnect: Created 4 states (2 start + 2 goal) [ INFO] [1706241098.973705734]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.973840962]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241098.975338541]: RRTConnect: Created 4 states (2 start + 2 goal) [ INFO] [1706241098.975516989]: ParallelPlan::solve(): Solution found by one or more threads in 0.003336 seconds [ INFO] [1706241098.975758339]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.975801050]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241098.977351188]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241098.977604418]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241098.977958161]: ParallelPlan::solve(): Solution found by one or more threads in 0.002242 seconds [ INFO] [1706241098.987616283]: SimpleSetup: Path simplification took 0.009098 seconds and changed from 3 to 2 states [ INFO] [1706241098.991561664]: Disabling trajectory recording [ INFO] [1706241099.057257615]: Joint_trajectory_action_server received goal! [ INFO] [1706241099.057388768]: Joint_trajectory_action_server accepted goal! [ INFO] [1706241099.057514418]: Joint_trajectory_action_server published goal via command publisher! [ INFO] [1706241106.905029665]: Controller j2s7s300 successfully finished [ INFO] [1706241107.159821255]: Completed trajectory execution with status SUCCEEDED ... [ INFO] [1706241177.459253921]: Combined planning and execution request received for MoveGroup action. Forwarding to planning and execution pipeline. [ INFO] [1706241177.459431923]: Planning attempt 1 of at most 1 [ INFO] [1706241177.460459015]: Planner configuration 'arm' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed. [ INFO] [1706241177.461227606]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.461369258]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.461522389]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.461644213]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.475838584]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.476090324]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.476256902]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.476670153]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.477388829]: ParallelPlan::solve(): Solution found by one or more threads in 0.016421 seconds [ INFO] [1706241177.478135437]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.478407700]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.478576702]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.478718654]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.482089642]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.482210532]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.482996057]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.483509839]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.483934227]: ParallelPlan::solve(): Solution found by one or more threads in 0.006049 seconds [ INFO] [1706241177.484289434]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.484442225]: RRTConnect: Starting planning with 1 states already in datastructure [ INFO] [1706241177.487177675]: RRTConnect: Created 4 states (2 start + 2 goal) [ INFO] [1706241177.488308949]: RRTConnect: Created 5 states (2 start + 3 goal) [ INFO] [1706241177.488768190]: ParallelPlan::solve(): Solution found by one or more threads in 0.004543 seconds [ INFO] [1706241177.511954937]: SimpleSetup: Path simplification took 0.023074 seconds and changed from 3 to 2 states [ INFO] [1706241177.557323050]: Joint_trajectory_action_server received goal! [ INFO] [1706241177.557392645]: Joint_trajectory_action_server accepted goal! [ INFO] [1706241177.557501030]: Joint_trajectory_action_server published goal via command publisher! [ INFO] [1706241186.504869532]: Controller j2s7s300 successfully finished
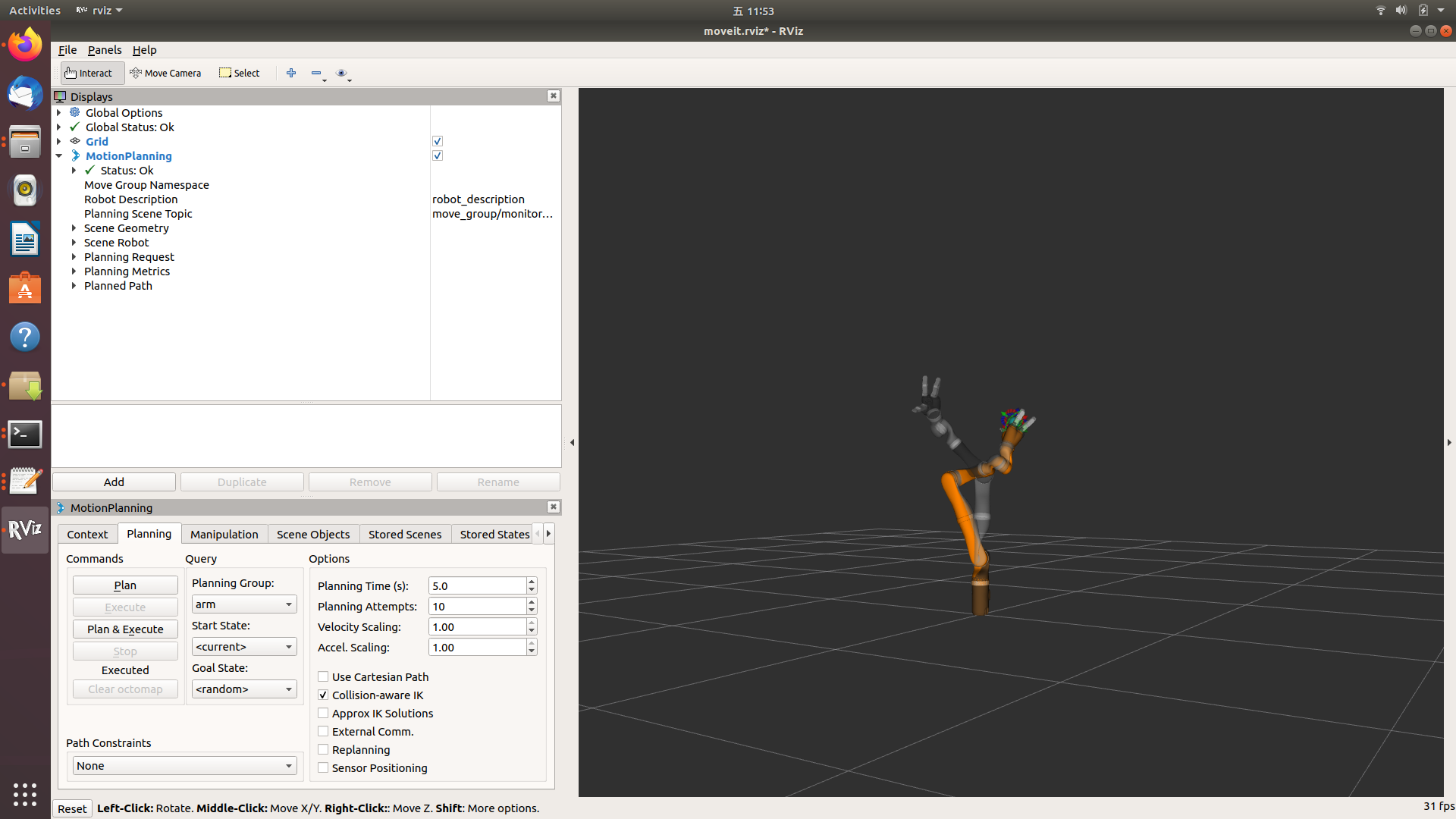
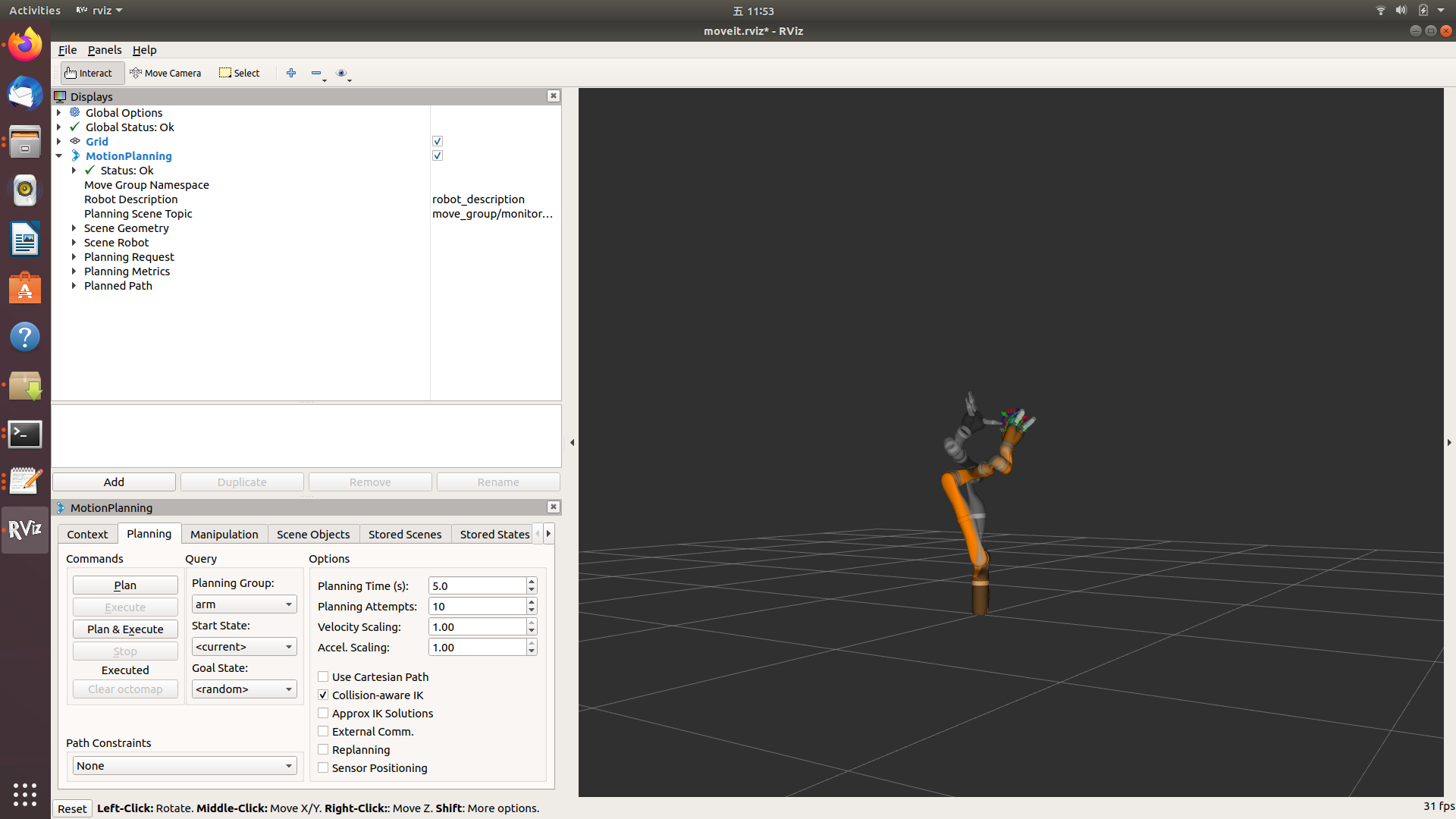
https://zhuanlan.zhihu.com/p/614797635
https://blog.csdn.net/weixin_43904973/article/details/130648260
#############################

 浙公网安备 33010602011771号
浙公网安备 33010602011771号