ABB IRB-120机械臂示教器转数计数器更新
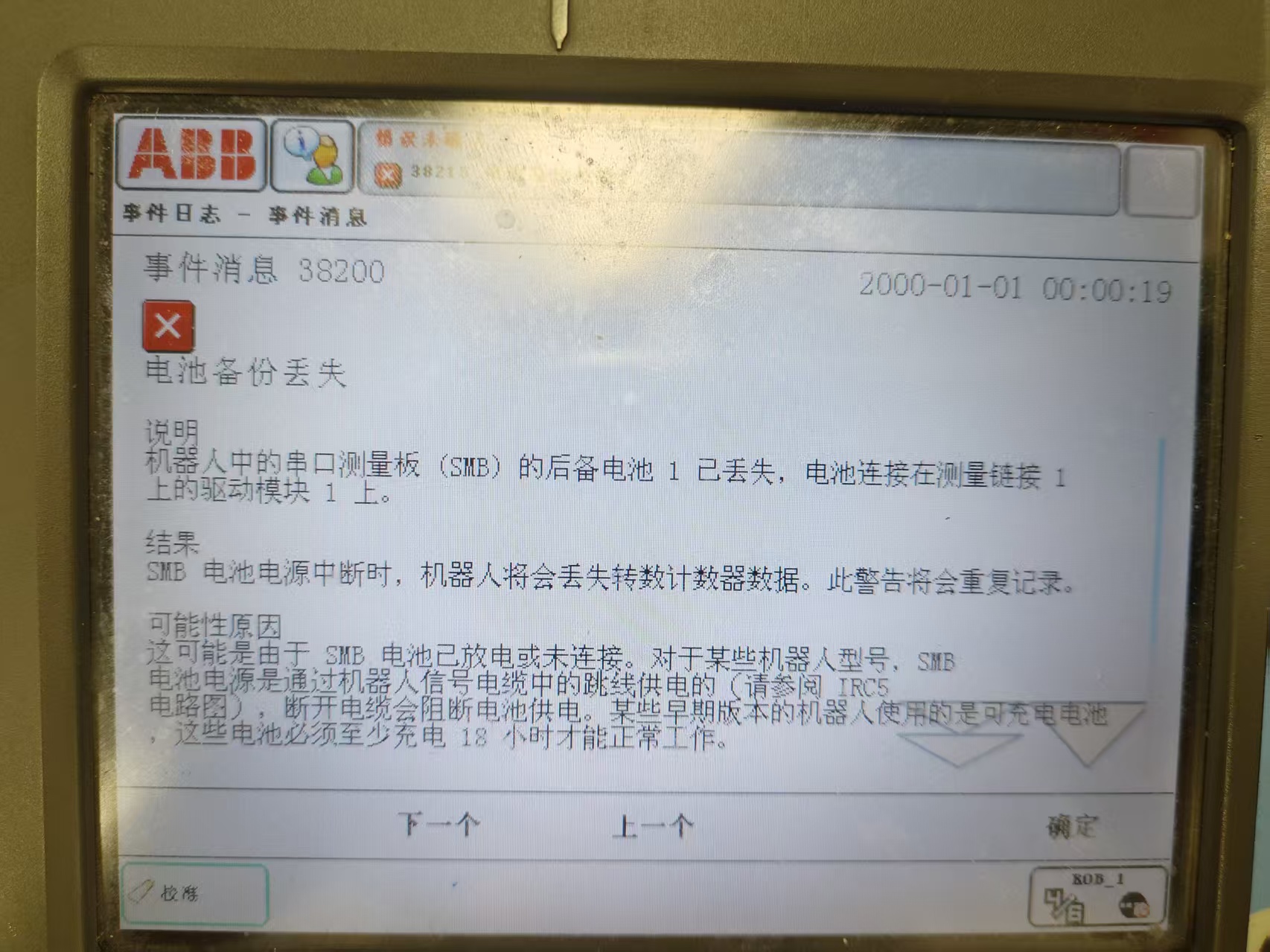
机器人控制器的 CMOS 电池没电后,每次断电重启都会造成内部数据丢失,包括系统时间和转数计数器。
其中,系统时间的丢失对大部分功能影响不大,但转数计数器的丢失将直接影响机器人的运行状态,需进行重新标定以确保运行精度。
现将转数计数器更新方法记录如下,以备查阅。
校准前对齐机械原点
在进行转数计数器更新之前,必须先对齐六个轴的机械原点标志。复位顺序需从轴号大的轴开始,逐步向小轴推进,即依次从6轴(手腕) → 5轴 → 4轴 → 3轴 → 2轴 → 1轴(基座)进行复位。
此顺序有助于在结构受限的情况下更方便地观测与对准标记。
需要注意的是,除2轴之外,机械原点标记其实是一个范围,无需精确对准中心,只需大致对齐即可。

图2 1轴机械原点标志

图3 2轴机械原点标志

图4 3轴机械原点标志
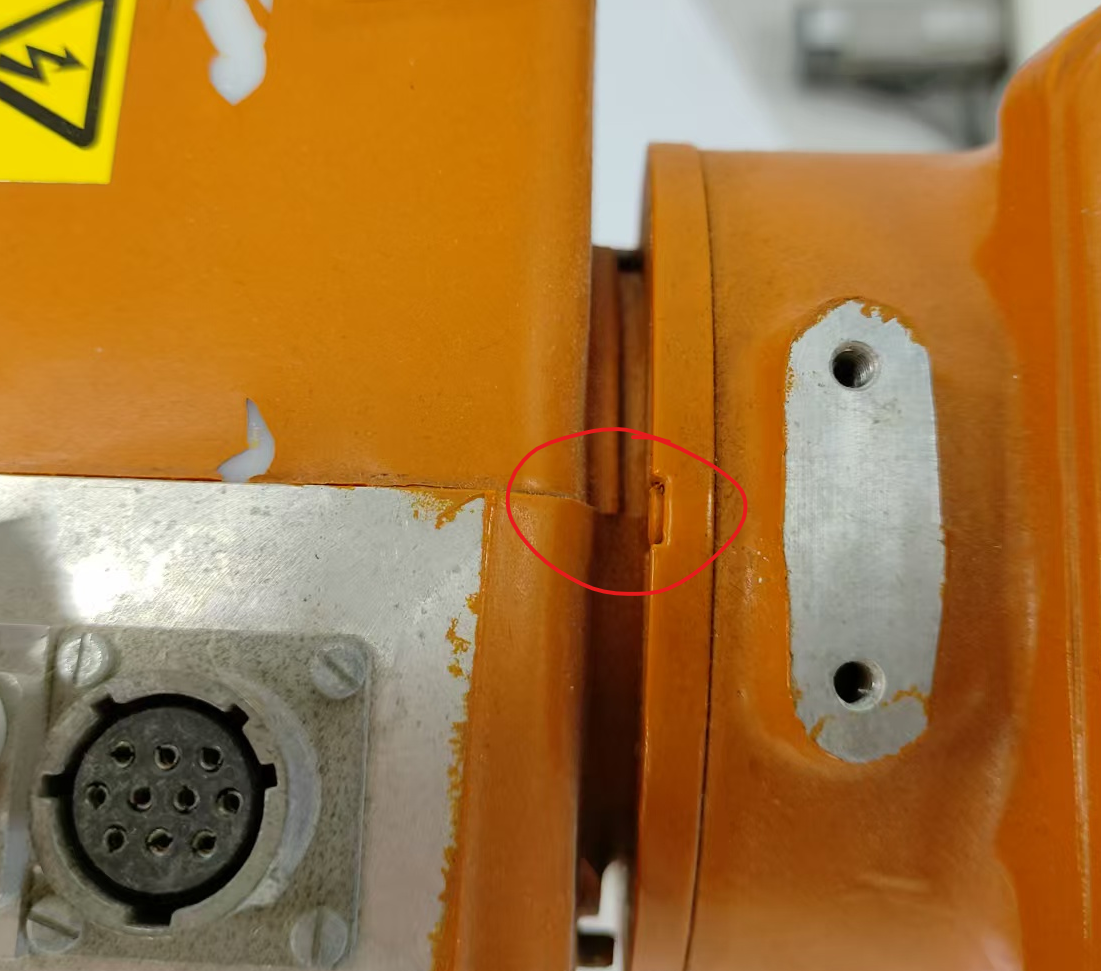
图5 4轴机械原点标志
需要注意的是,本处机械原点,4轴侧标志为其装配合模线。
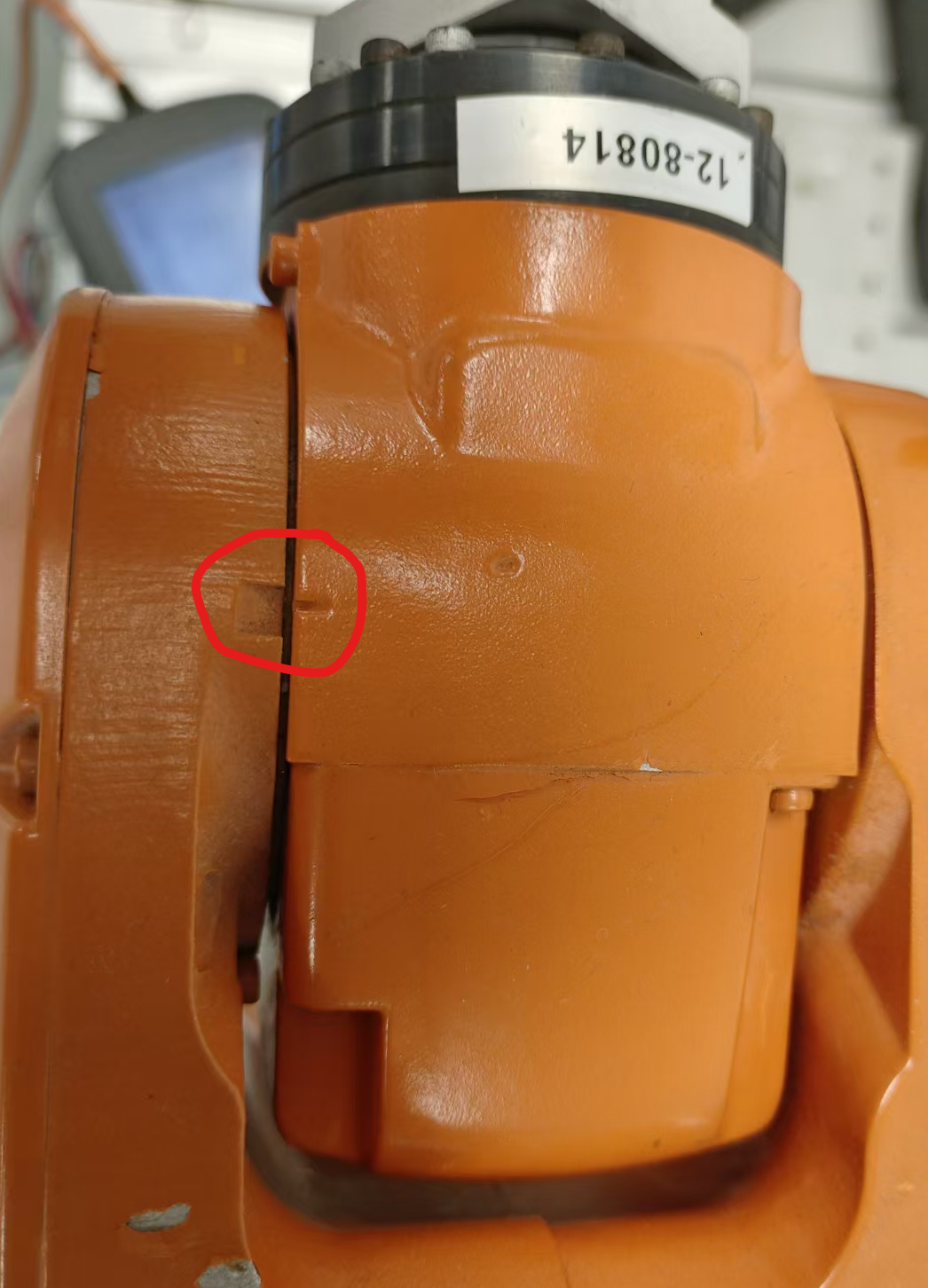
图6 5轴机械原点标志
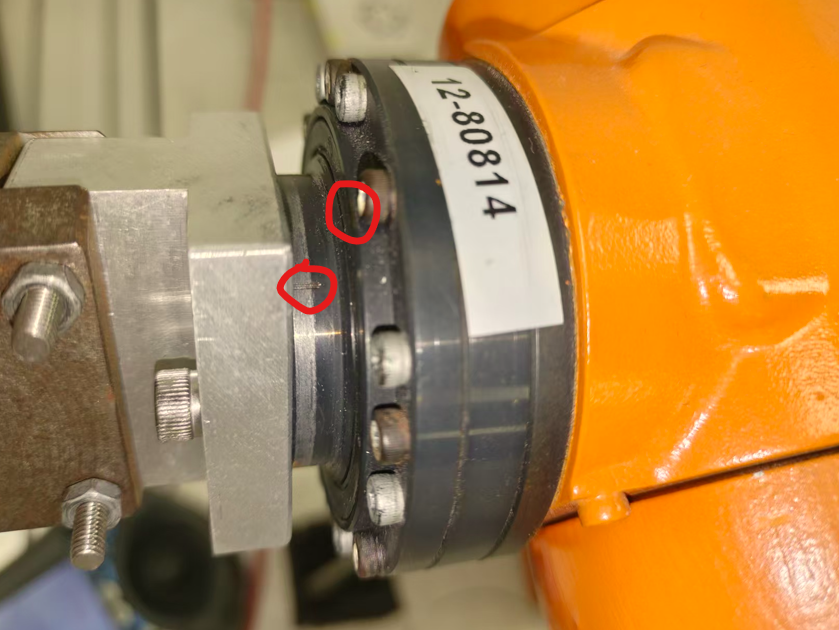
图7 6轴机械原点标志
需要注意的是,在5轴的端部也就是6轴的根部,正上方一个螺丝的下面有一条浅浅的白色痕迹,那就是6轴机械原点需要对应上的地方。
更新转数计数器操作流程
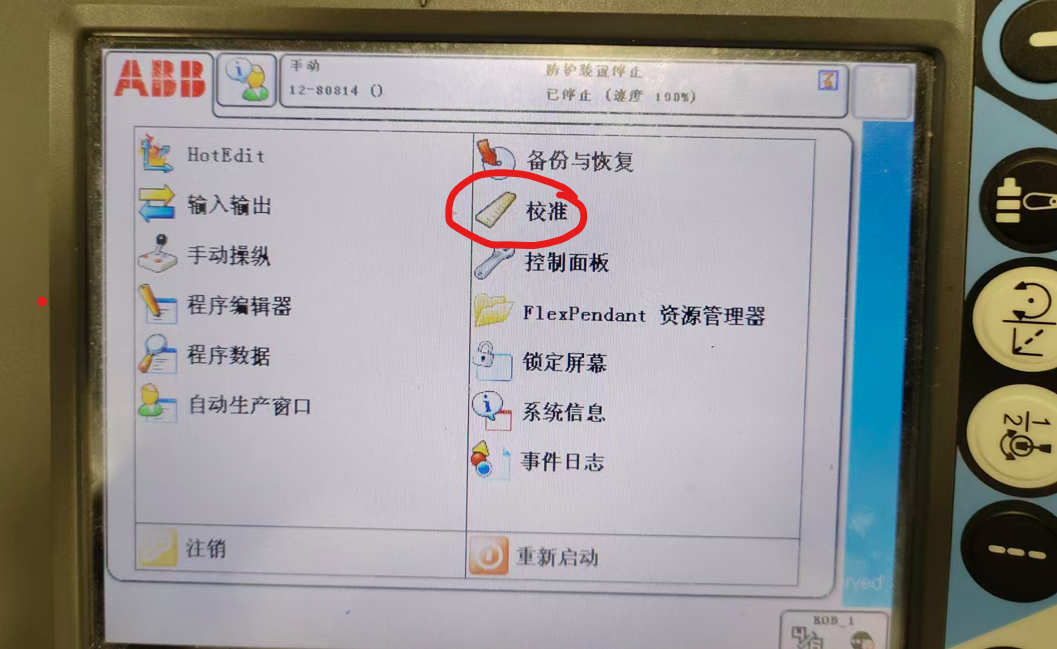
图8
接下来进入示教器,点击校准
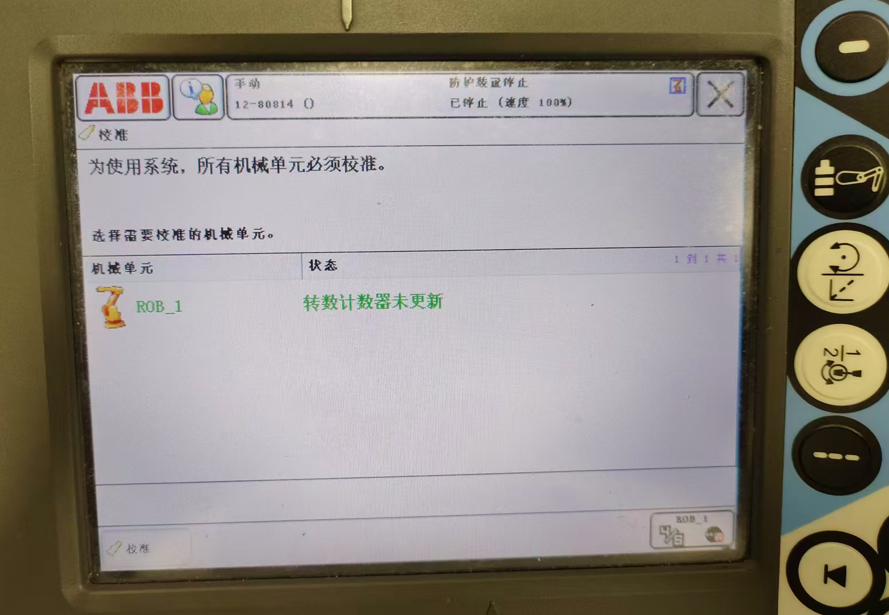
图9
控制器所控制的所有的机械臂都在这里,选择需要校准的机械臂。我这里是一个控制器只带了一个机械臂,就点ROB_1就行。
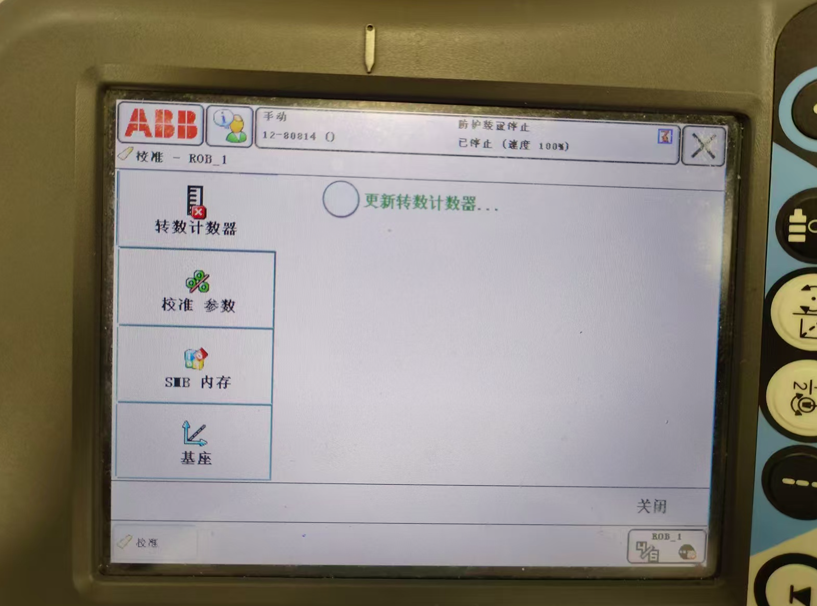
图10
直接点更新转数计数器
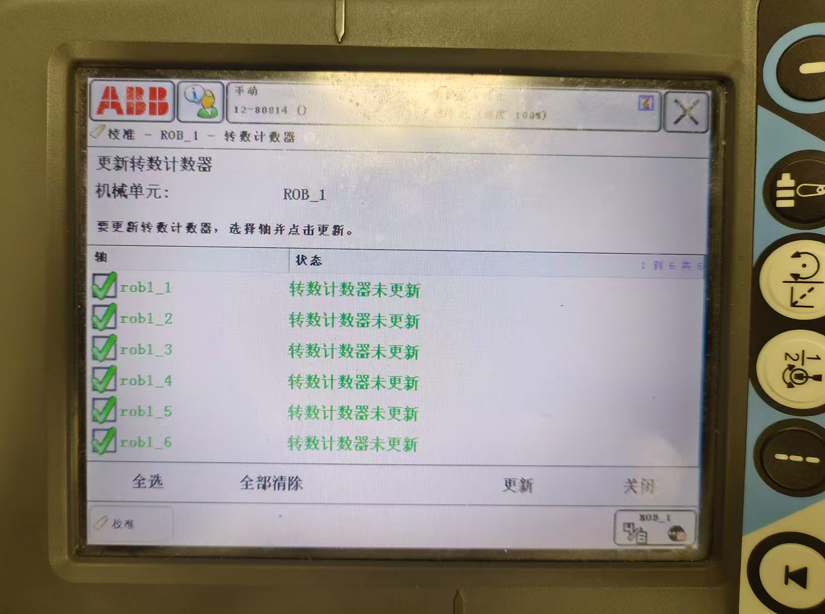
图11
此时系统提示当前计数器未更新。点击左下角“全选” ,再点击右下角“更新”。
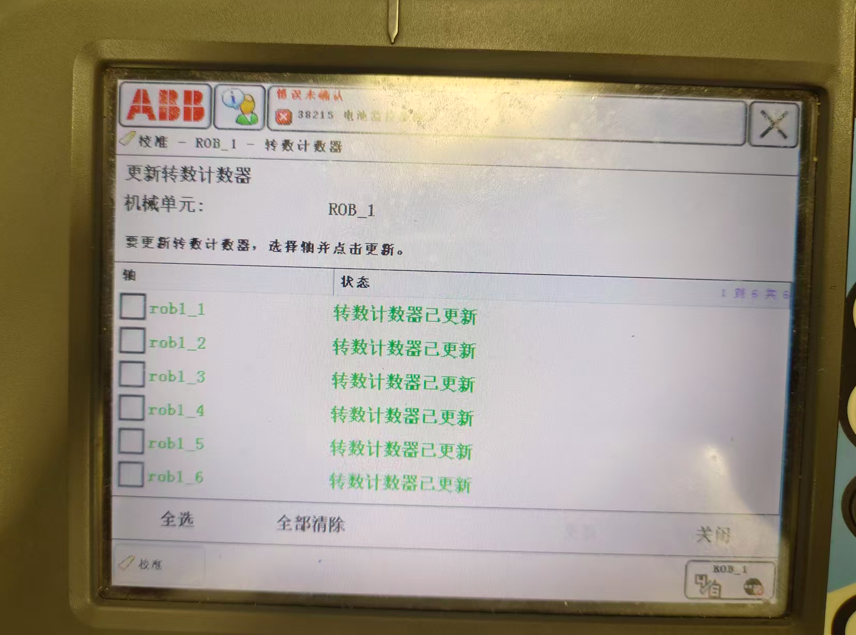
图12
更新过程约需 2~3 分钟,完成后界面状态将显示为已更新。
转数计数器更新完成后,可正常退出校准界面,恢复正常任务运行。后续建议及时更换控制器内电池,以防频繁断电后重复出现类似问题。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号