
OpenCV 学习笔记(3)matlab相机参数标定
0准备标定版
F:\dongdong\0tool\MATLAB\help\toolbox\vision\examples

matlab自动准备了一个pdf标定版打印出来,注意
1采集相机标定图像
采集代码
python 运行后,2秒自动抓拍存在save文件夹下面
自己拍摄不同的角度
import cv2
import datetime
#二维码动态识别
ImgW=640
ImgH=480
camera=cv2.VideoCapture(0)
camera.set(3,ImgW) #设置分辨率
camera.set(4,ImgH)
i=0
cv2.namedWindow('frame',0)
start = datetime.datetime.now()
while True:
(grabbed,frame)=camera.read()
#获取画面中心点
h1,w1= frame.shape[0],frame.shape[1]
cv2.imshow('frame',frame)
key=cv2.waitKey(1)
if key & 0xFF == ord('s'): # 按q保存一张图片
i=i+1
name="./save/frame"+str(i)+".jpg"
cv2.imwrite(name, frame)
elif key==ord('q'):
break
end = datetime.datetime.now()
timejiange=int(str((end-start).seconds))
if timejiange>2:
i=i+1
name="./save/frame"+str(i)+".jpg"
cv2.imwrite(name, frame)
start = datetime.datetime.now()
print("保存",i)
camera.release()
cv2.destroyAllWindows()
2开始标定
得到一组图像,打开matlab开始标定
-
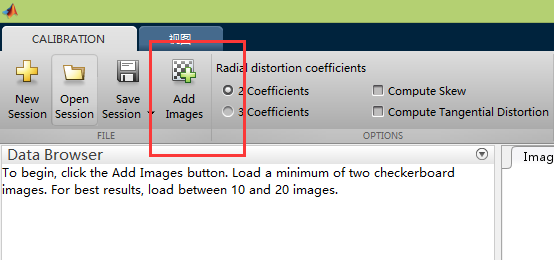
应用程序下找到Camera Calibration工具箱

-
加载待标定的图像,这里选择2coefficients计算经向畸变更稳
-

-
填写棋盘格每个格子边长的真实值 实验室的标定板 20mm 毫米


-

-
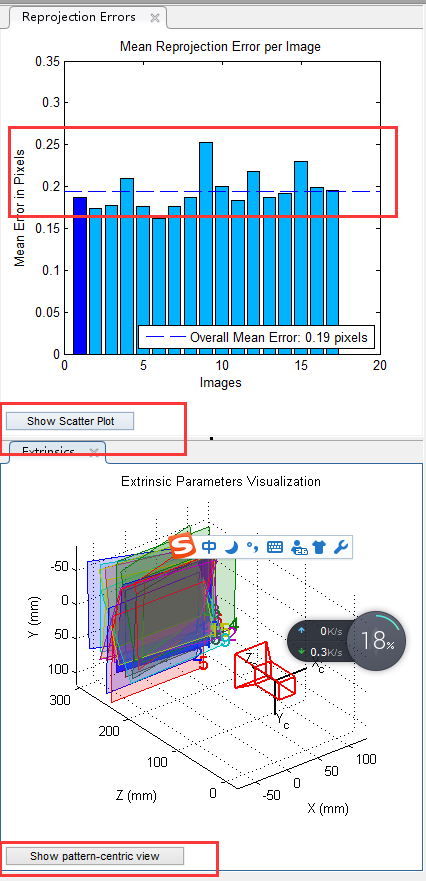
可以预览成功检测出棋盘格的图像,然后开始标定,点击Calibrate
-


-
平均误差小于0.5即可,超过的鼠标点击对应的柱状,删除键
-
-

-
导出相机标定参数

-
在matlab工作空间里可以看到相机参数的属性
- 普通相机参数解析
-


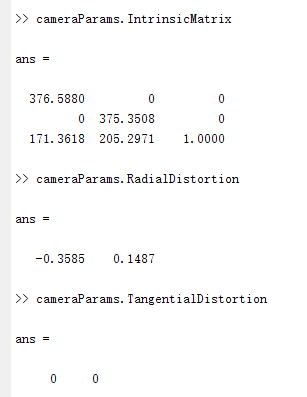
相机的内参矩阵
-


径向畸变和切向畸变。 -
谷壳USB相机标定结果

相机内参 3*3一共9个
831.514230246688 0 0
0 831.972596866759 0
327.324903206150 262.347092547845 1
真实使用需要转置沿着对角线翻上去
畸变参数
径向畸变Radial distortion 径向畸变3个(k1,k2,k3)

(我们选择的是两个参数 k3认为0)
0.195387502976378 -1.36446754085673
切向畸变tangentialdistortion 2个(p1,p2)
0 0
使用的时候
OpenCV中的畸变系数的排列(这点一定要注意k1,k2,p1,p2,k3),千万不要以为k是连着的。
代码调用
#相机内参 matlab标定出来的结果 不能直接用,需要沿着对角线翻转
fx = 831.514230246688
fy = 831.972596866759
cx = 327.324903206150
cy = 262.347092547845
K = np.array([[fx, 0., cx],
[0., fy, cy],
[0., 0., 1.0]])
#畸变系数k1 k2 pq p2 k3
dist=np.array(([[0.195387502976378 ,-1.36446754085673, 0 ,0 ,0]]))
xml保存替换数据
<?xml version="1.0" encoding="utf-8"?>
<opencv_storage>
<camera-matrix type_id="opencv-matrix">
<rows>3</rows>
<cols>3</cols>
<dt>d</dt>
<data>3099.7082447931371000 0.0000000000000000 1077.7535540640906000
0.0000000000000000 3086.4434775466948000 1826.5450377846478000
0.0000000000000000 0.0000000000000000 1.0000000000000000
</data>
</camera-matrix>
<distortion type_id="opencv-matrix">
<rows>5</rows>
<cols>1</cols>
<dt>d</dt>
<data>-0.0890744873306951 5.1317176243308209 -0.0051019418392772 -0.0021081150992697 -39.0645994879151530 </data>
</distortion>
</opencv_storage>
鱼眼相机参数解析
可视化结果




img=imread("10.jpg") result = undistortFisheyeImage(img, cameraParams.Intrinsics); subplot(1,2,1);imshow(img);title('原始图像') subplot(1,2,2);imshow(result);title('校正图像')
对比


 浙公网安备 33010602011771号
浙公网安备 33010602011771号