

官网 https://github.com/raulmur/ORB_SLAM2
1从http://www.cvlibs.net/datasets/kitti/eval_odometry.php下载数据集(灰度图像)
百度网盘:
进入
进入00

进入image_0
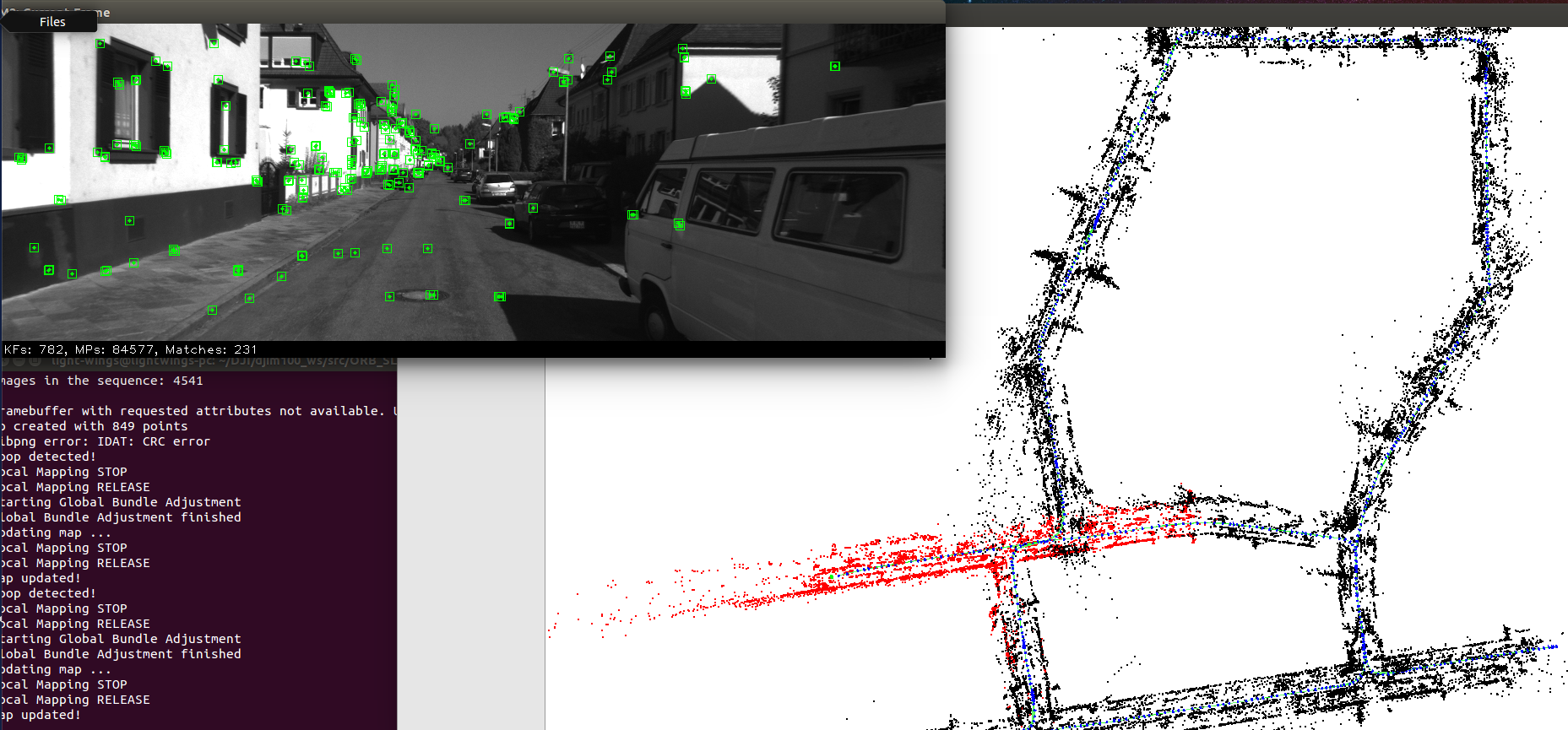
2 执行以下命令.
官方说明:
2.1 根据测试的数据,KITTIX.yaml分别替换成KITTI00-02.yaml,KITTI03.yaml或KITTI04-12.yaml。
2.2 更改PATH_TO_DATASET_FOLDER未压缩的数据集文件夹。更改SEQUENCE_NUMBER为00,01,02,...,11。
官方运行命令
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTIX.yaml PATH_TO_DATASET_FOLDER/dataset/sequences/SEQUENCE_NUMBER
自己说明:
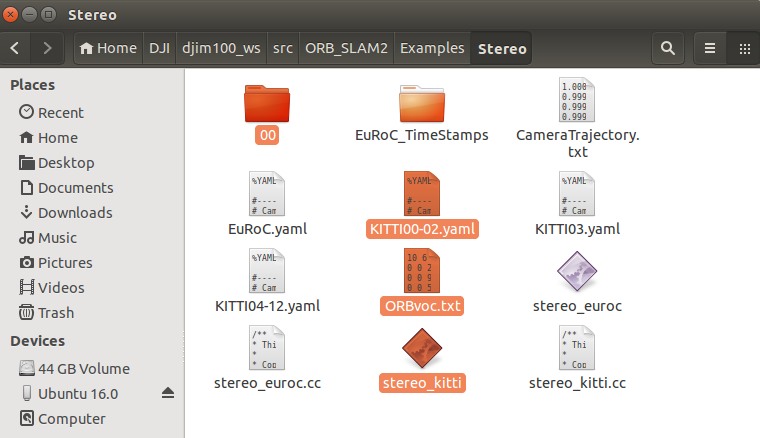
这里我是使用的是00文件夹的测试数据.
对应相机参数文件 KITTI00-02.yaml
词袋模型是自带的 ORBvoc.txt
把这三个文件分别放在./Examples/Stereo/stereo_kitti下
直接运行命令:
进入 目录下
目录下
./stereo_kitti ORBvoc.txt KITTI00-02.yaml 00


 浙公网安备 33010602011771号
浙公网安备 33010602011771号