


整合所有步骤
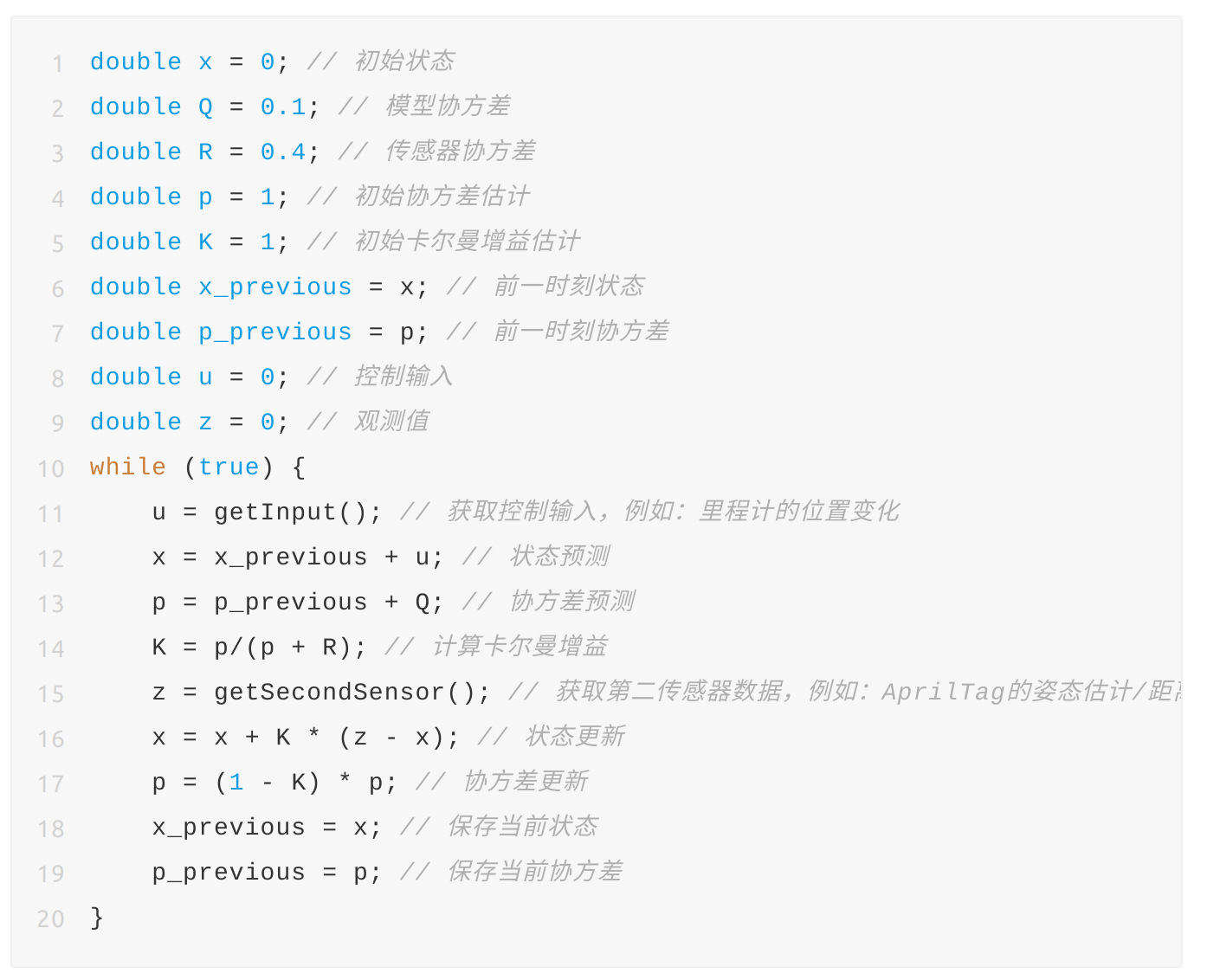
至此,我们已经得到了构建一个单输入-单输出卡尔曼滤波器所需的全部公式。现在可以将它们整合成一个可在软件中实现的算法流程:
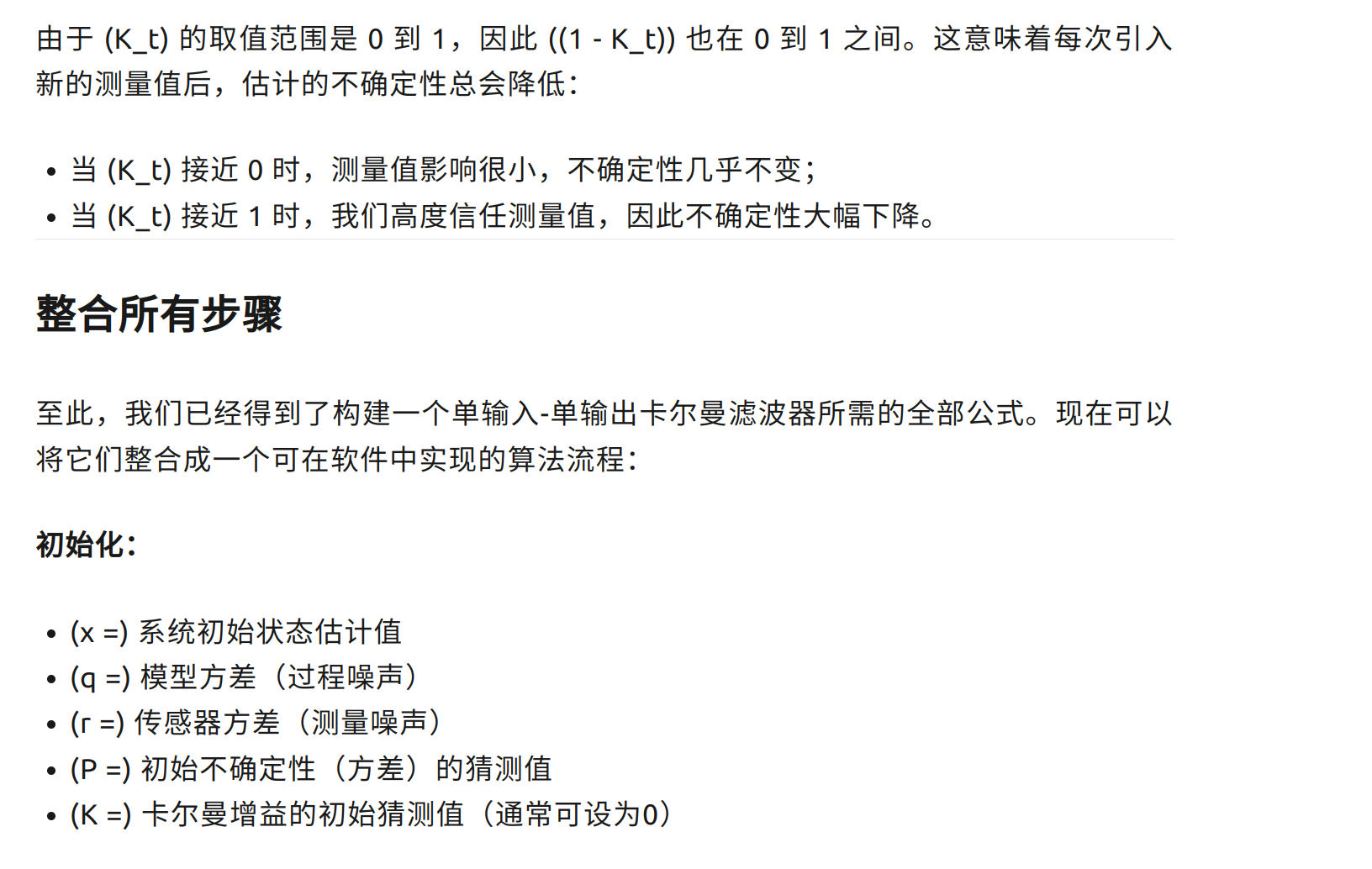
初始化:
- (x =) 系统初始状态估计值
- (q =) 模型方差(过程噪声)
- (r =) 传感器方差(测量噪声)
- (P =) 初始不确定性(方差)的猜测值
- (K =) 卡尔曼增益的初始猜测值(通常可设为0)
循环执行以下步骤:
-
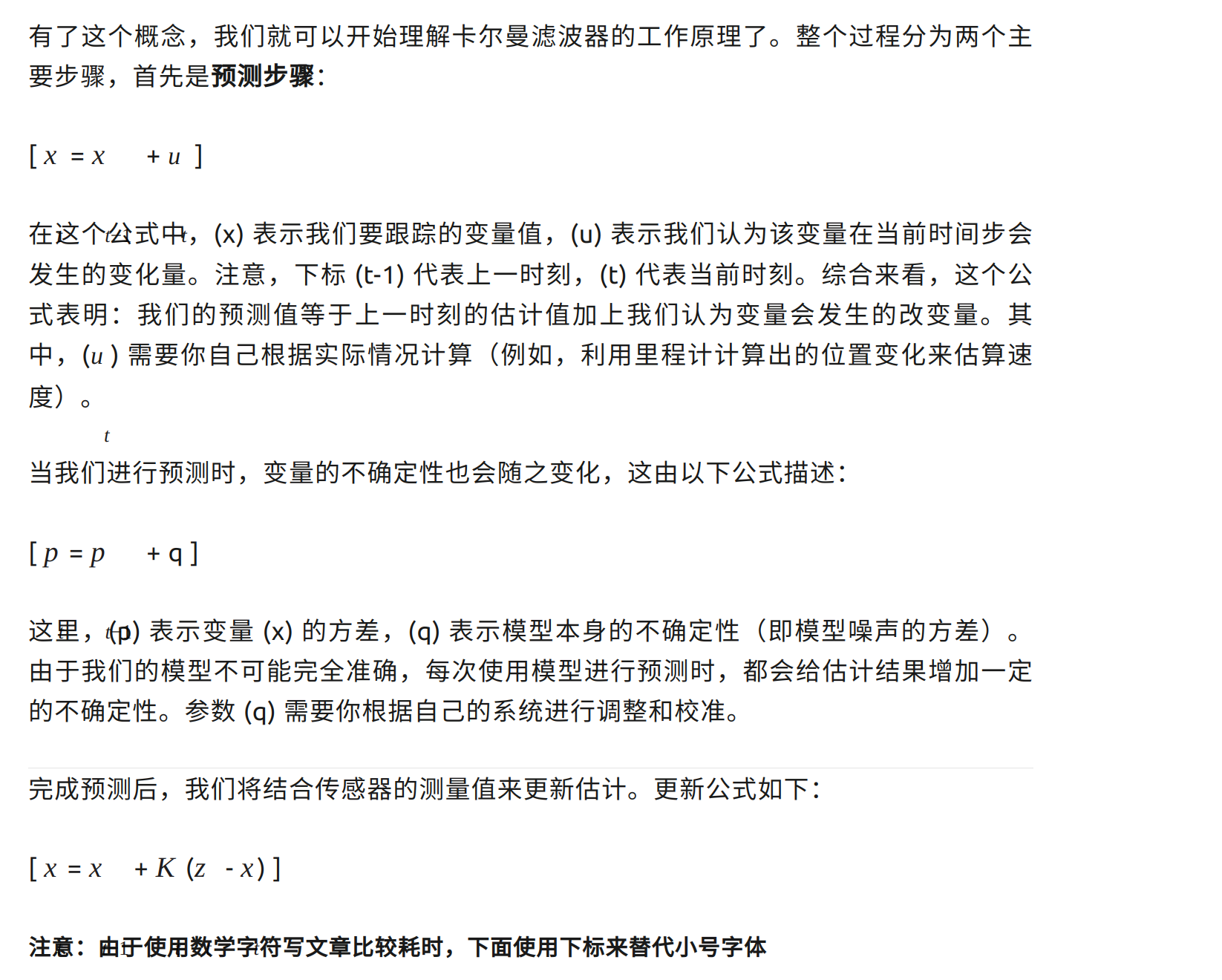
状态预测:
(x_t = x_{t-1} + u_t) -
不确定性预测:
(p_t = p_{t-1} + q) -
计算卡尔曼增益:
(K_t = p_t / (p_t + r)) -
状态更新(融合传感器数据):
(x_t = x_{t-1} + K_t * (z_t - x_t)) -
不确定性更新:
(p_t = (1 - K_t) * p_t)
以上便是卡尔曼滤波器的伪代码实现。通过这个简洁而强大的算法,你可以在自己的项目中有效融合模型预测与传感器数据,获得更稳定、更精确的状态估计。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号