


AnyLoc(超强通用视觉位置识别)



优缺点总结
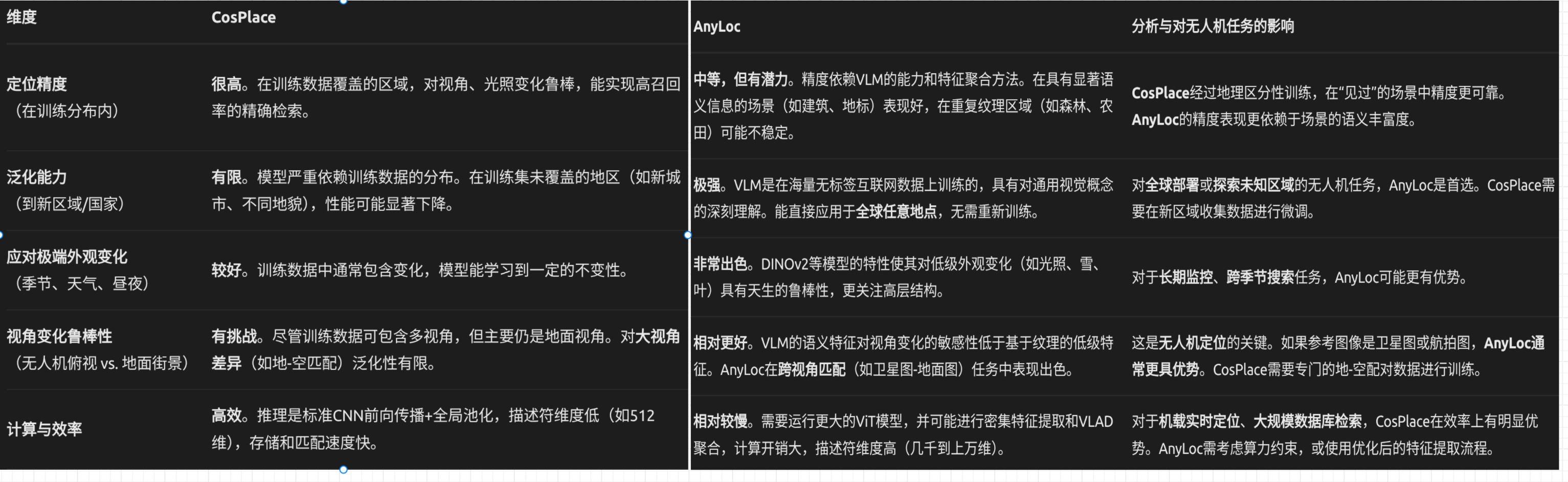
CosPlace 优点:
- 精度高:在已知场景中,经过优化后检索精度领先。
- 效率高:模型轻量,检索速度快,适合实时应用和大型数据库。
- 工程成熟:流程标准化,易于集成和部署。
CosPlace 缺点:
- 泛化性差:严重依赖训练数据,无法零样本迁移到新环境。
- 跨视角弱:处理地-空等大视角差异时需要针对性训练。
- 数据依赖:需要大量、高质量的地理标注数据。
AnyLoc 优点:
- 超凡的泛化能力:开箱即用,可部署到全球任何地方。
- 强大的外观不变性:对季节、光照、天气变化极其鲁棒。
- 优秀的跨视角性能:天然更适合无人机与卫星/航拍图的匹配。
- 无数据标注负担:无需收集和标注地理数据。
AnyLoc 缺点:
- 计算成本高:模型大,推理慢,内存占用高。
- 精度可能不稳定:在语义模糊、重复纹理区域性能可能下降。
- 描述符庞大:高维描述符对存储和匹配速度有挑战。
结论与趋势
- CosPlace是“专家”: 它在特定、已知、可控的环境下,经过充分训练后,能提供更快、更准的定位服务。
- AnyLoc是“通才”: 它在未知、多变、复杂的环境中,提供了开箱即用、鲁棒性强的解决方案,尤其在跨视角场景中优势明显。
技术融合趋势:
- 混合方案: 使用AnyLoc进行全球粗定位,快速缩小范围;在目标区域使用专门训练的CosPlace模型进行局部精定位。
- 蒸馏与优化: 将AnyLoc中大型VLM的“知识”蒸馏到更小的CNN网络中,在保持一定泛化能力的同时提升效率。
- 专用训练: 收集无人机航拍数据,在AnyLoc的架构上进行有监督的微调,可能产生更适合无人机任务的SOTA模型。
最终建议: 对于大多数探索性、广域、跨视角的无人机任务,AnyLoc是更安全、更通用的起点。对于重复性、高精度、已知区域的任务,投入数据训练一个专属的CosPlace模型会带来最佳性能。
经典文献阅读之--AnyLoc(超强通用视觉位置识别)
最近,CosPlace [20]将基于分类的学习与包含4000万张带GPS和航向的旧金山XL数据集相结合。目前的最先进技术MixVPR [21]提出了一种基于梯度采集器的特征混合器,该混合器在GSV-Cities数据集[22]上进行训练,该数据集是一个提出策划的大规模数据集,包含全球62,000个地点的530,000张图像。
AnyLoc实现了在各种环境(任何地点)、时间变化(任何时间)和视角变化范围广泛(任何视角)下的通用视线地点识别(VPR)。AnyLoc通过聚合从大规模预训练模型(基础模型)提取的每个像素特征来实现这一目标,而进行任何训练或校准。在PCA面板(中间),请注意MixVPR的特征(一种专门用于VPR的最先进方法)如何集中在特征空间的一个小区域,失去了区分能力。揭示了包含相似属性的数据集的不同领域,用相同的颜色标记。 利用这些领域监督构建无VLAD聚合的词汇表,使AnyLoc在具有成型(城市室外、室内)和非成型(水下、空中、地下、庭院)环境中实现了高达4倍的Recall@1,如雷达图(右侧)中的施工区域所示。
因此,AnyLoc采用DINO和DINOv2视觉转换器来导出视觉特征。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号