


Reloc3r: Large-Scale Training of Relative Camera Pose Regression for Generalizable, Fast, and Accurate Visual Localization
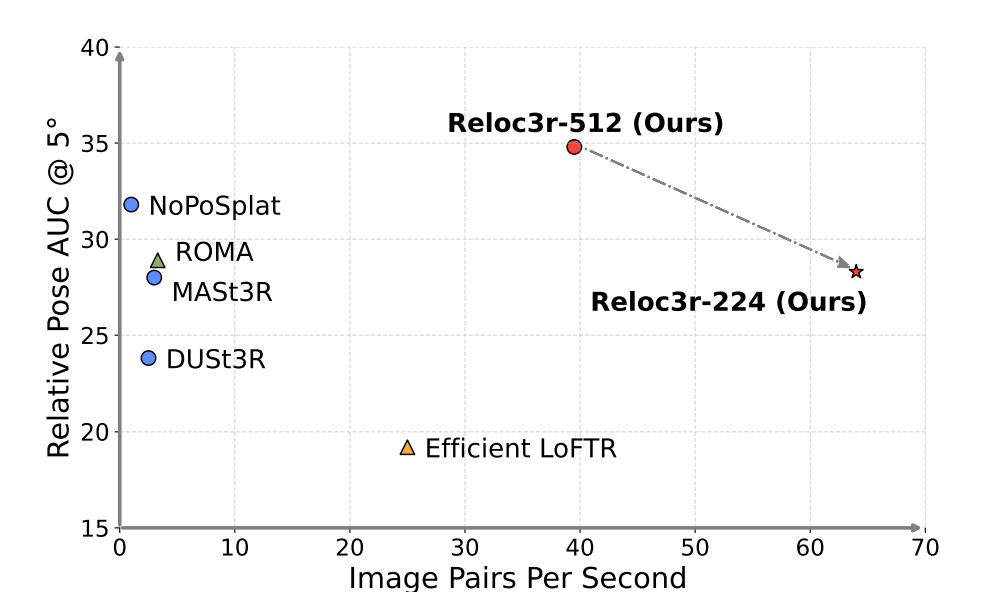
Reloc3r
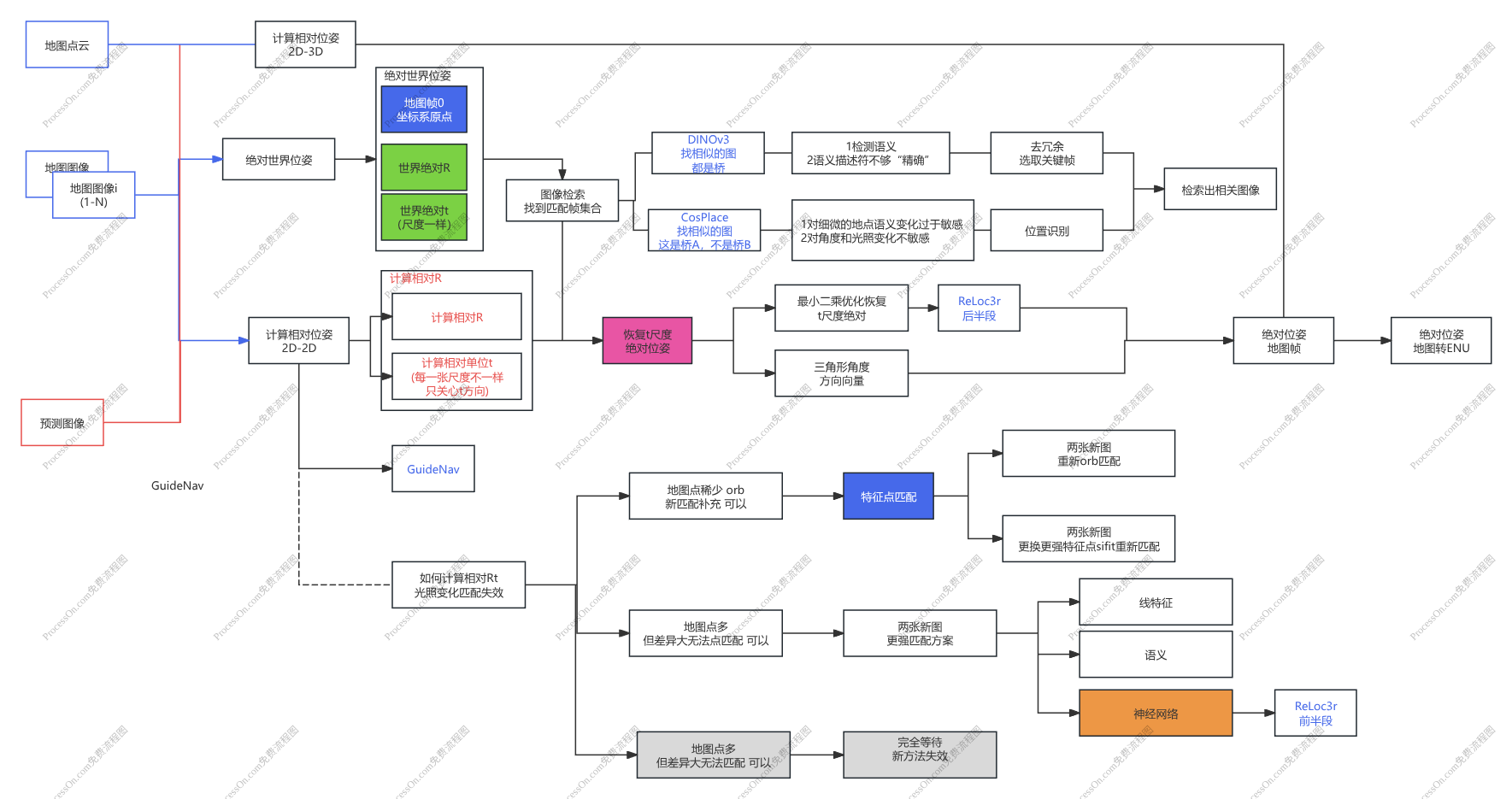
分为两个阶段
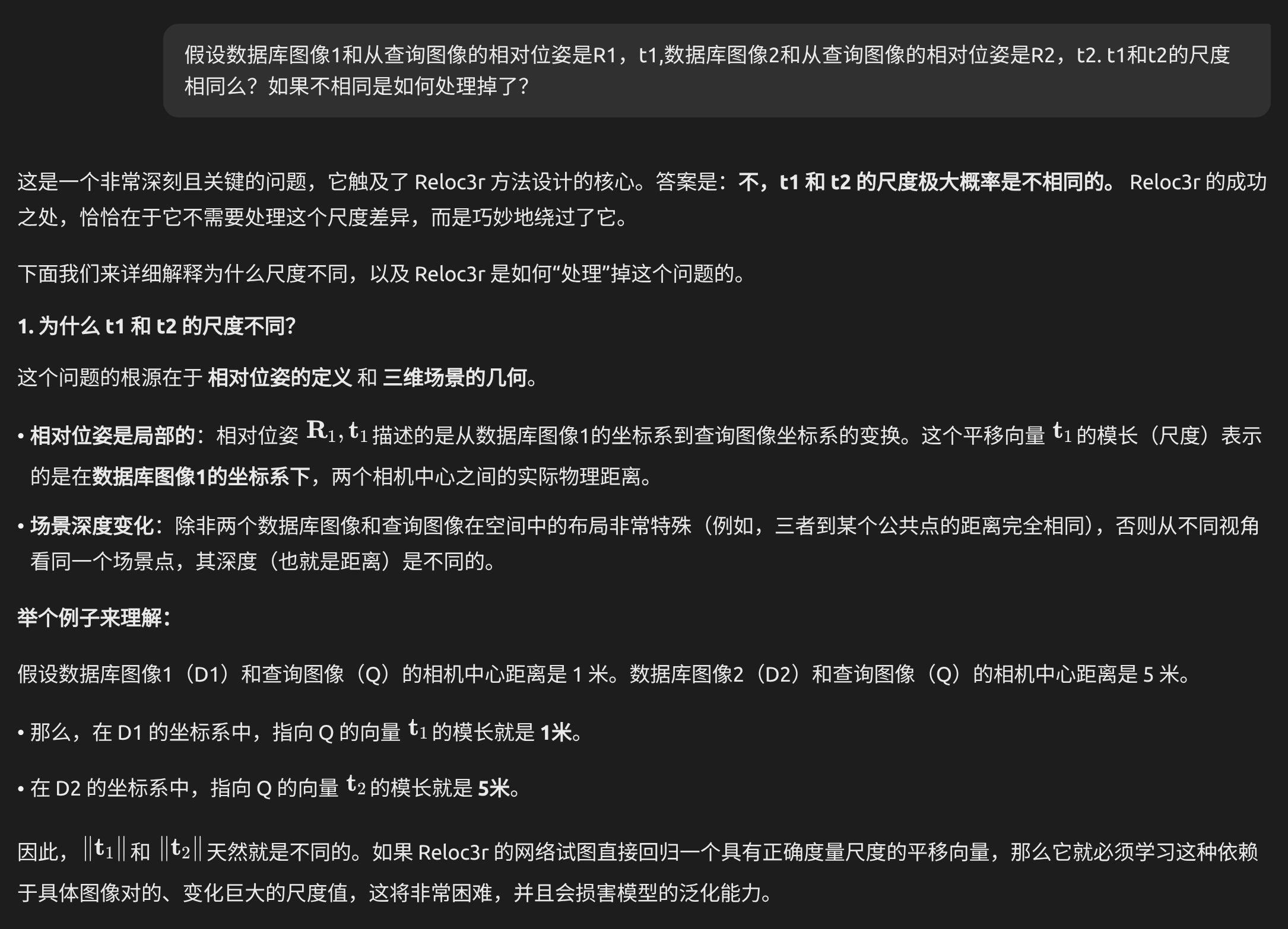
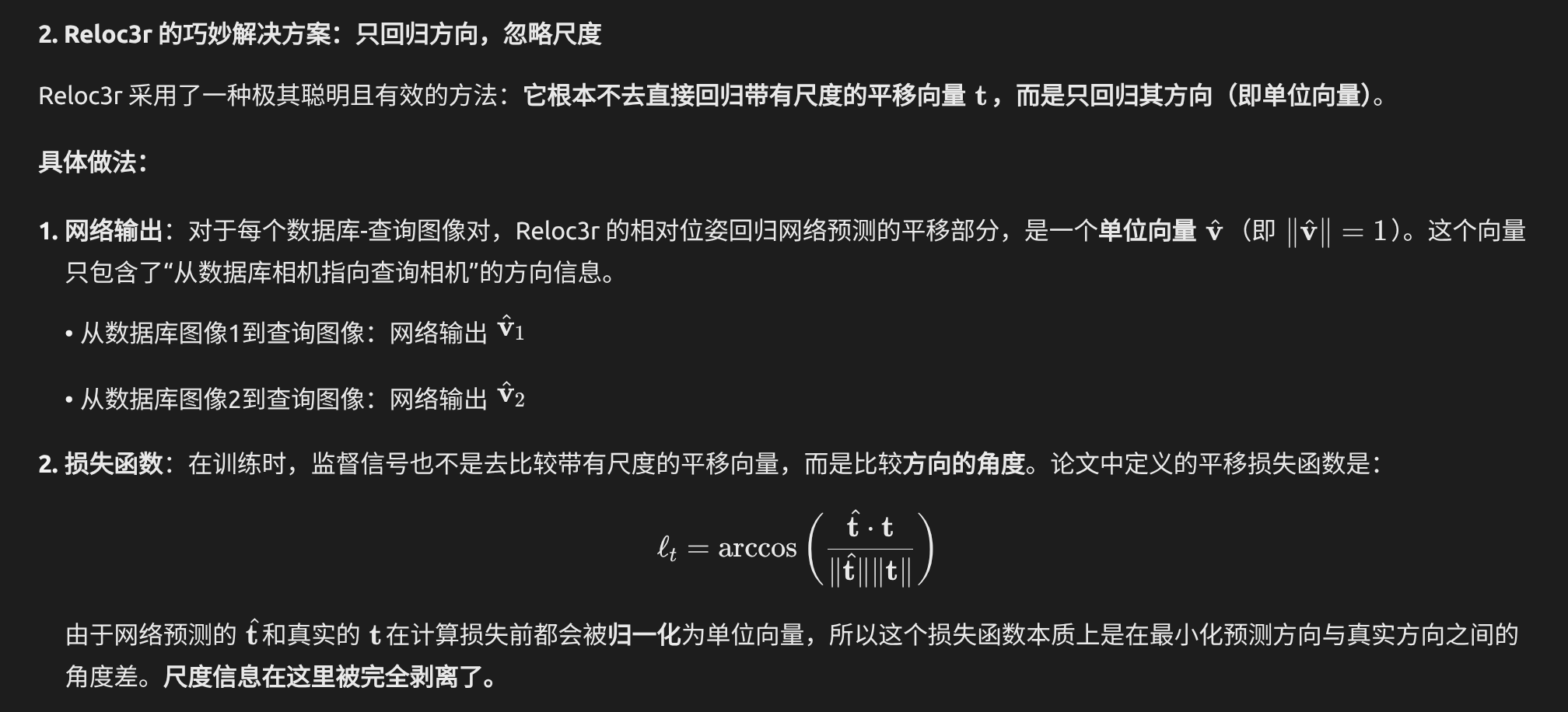
阶段1 两张图像之间神经网络计算相对R和没有尺度的单位t
关键点:
1 采用神经网络训练计算出来的。
2 这一块未来可以用别的模块代替。
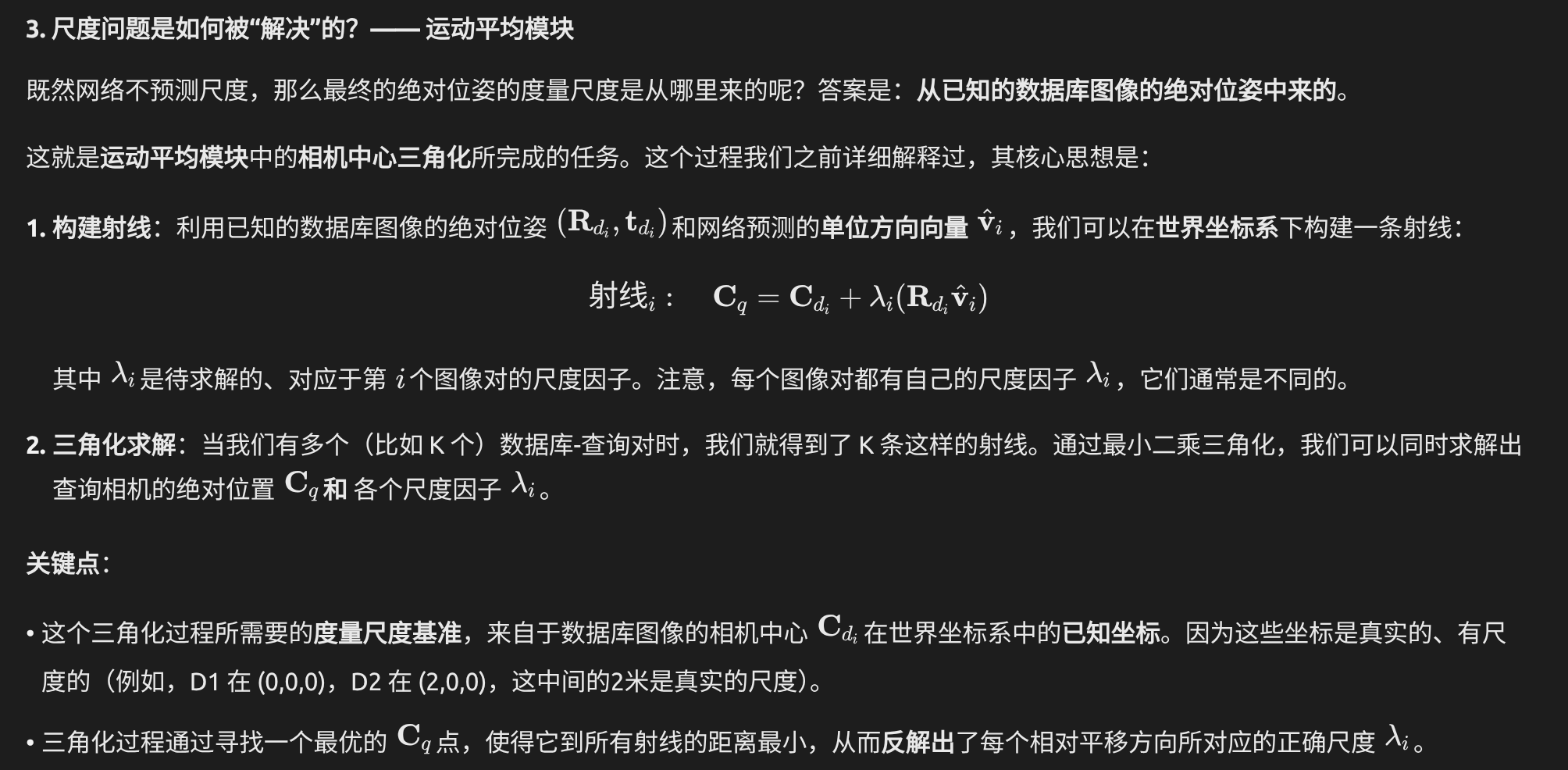
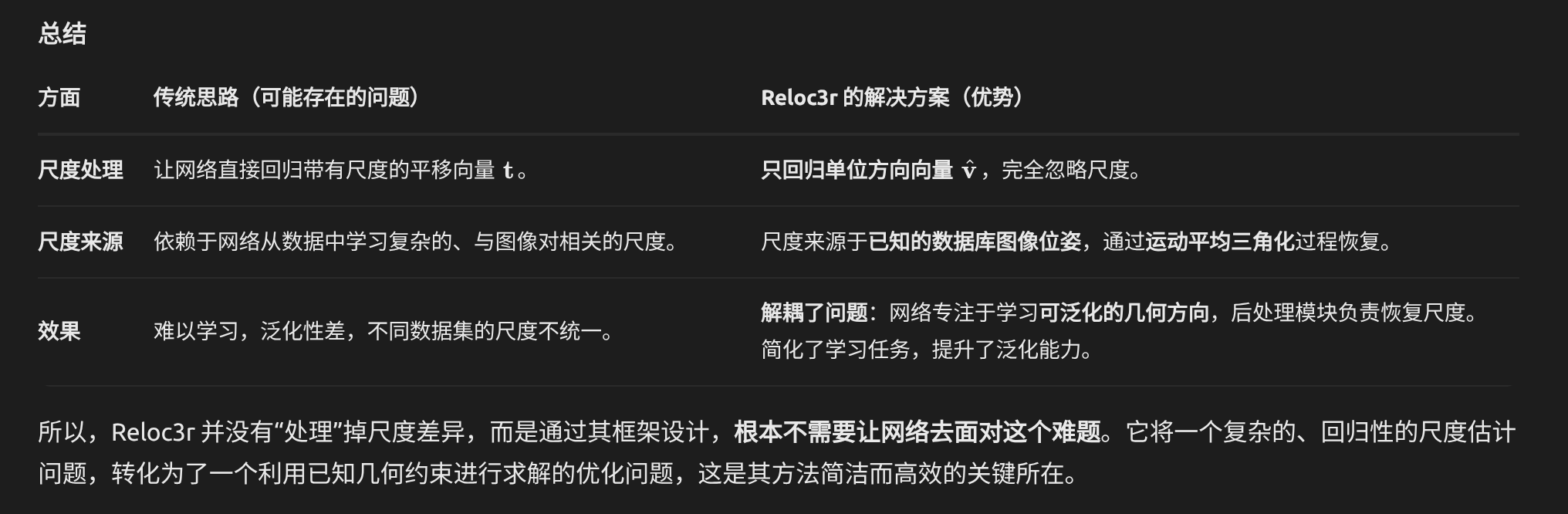
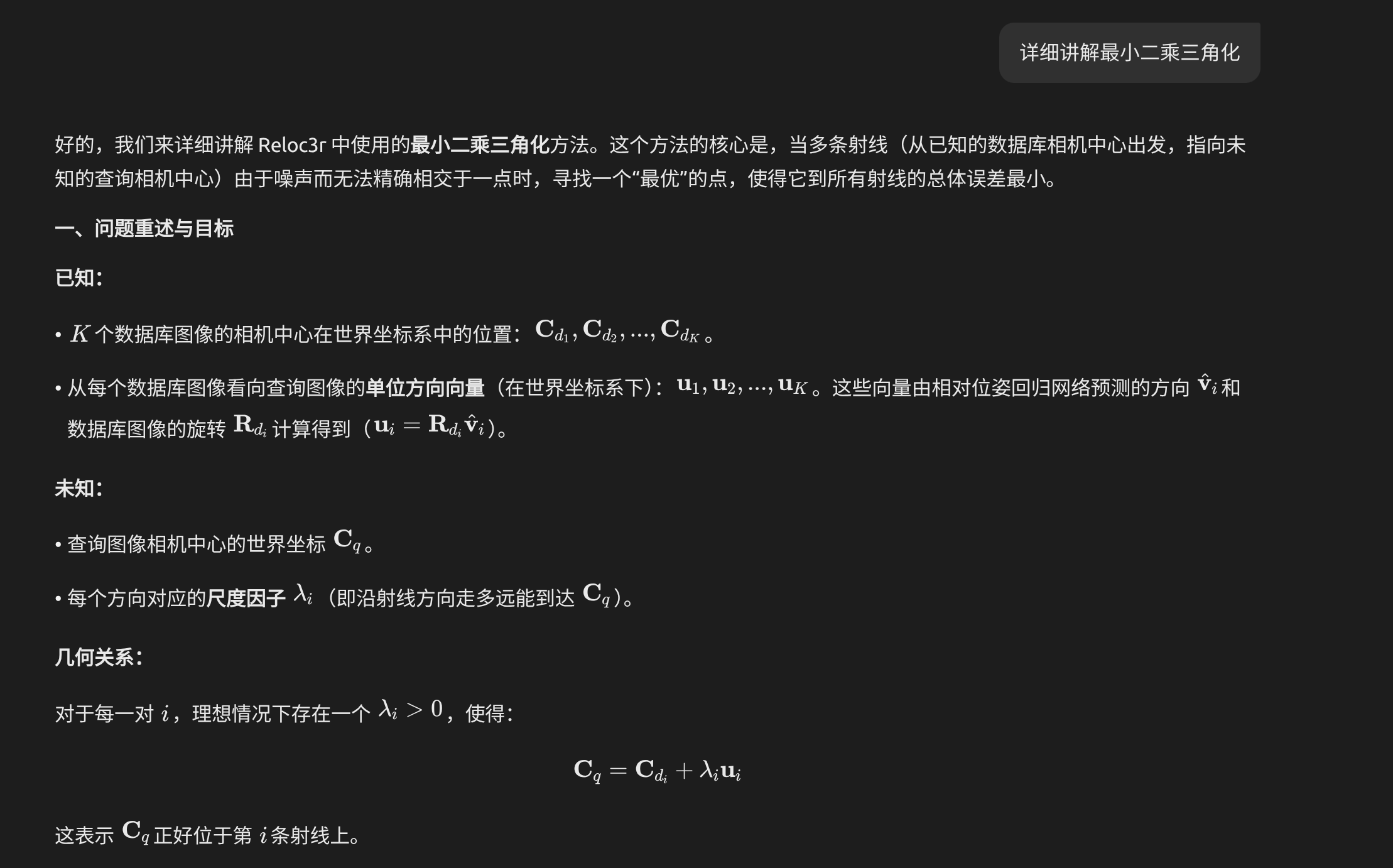
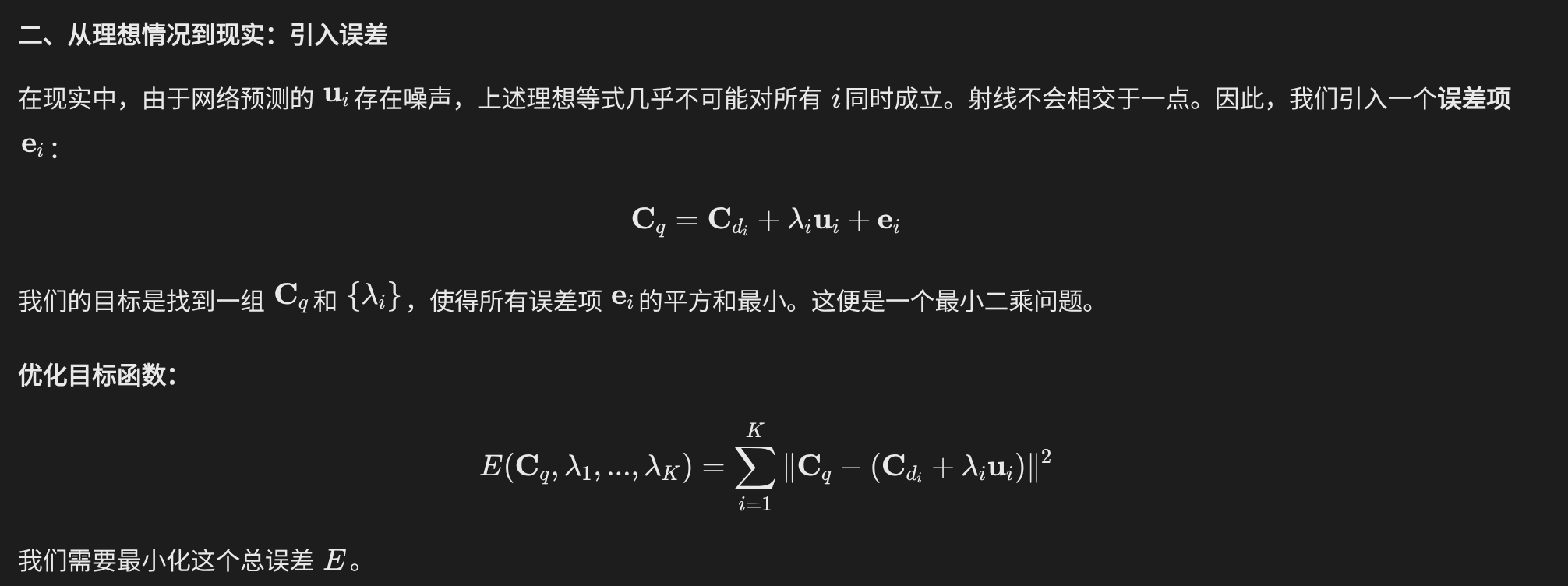
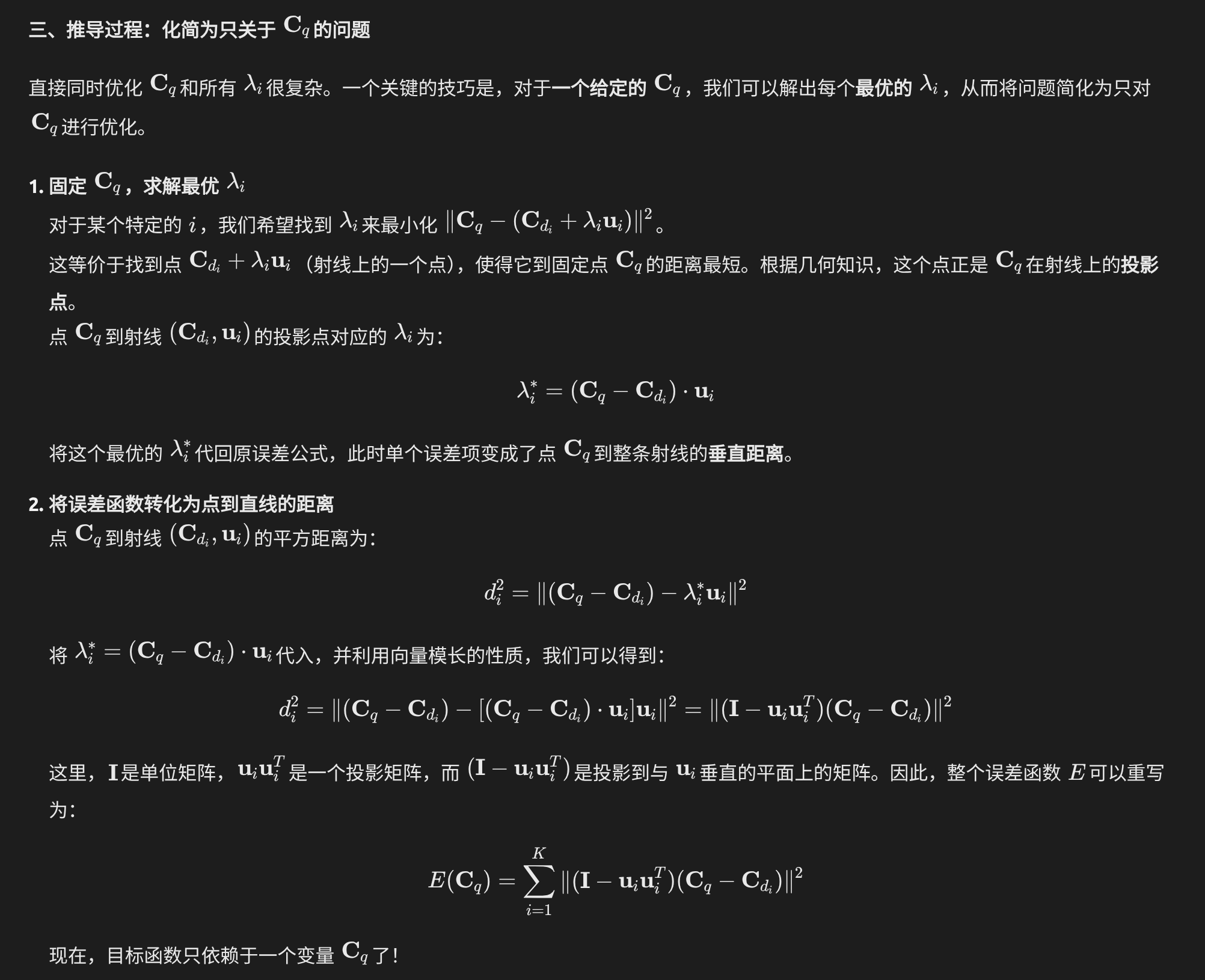
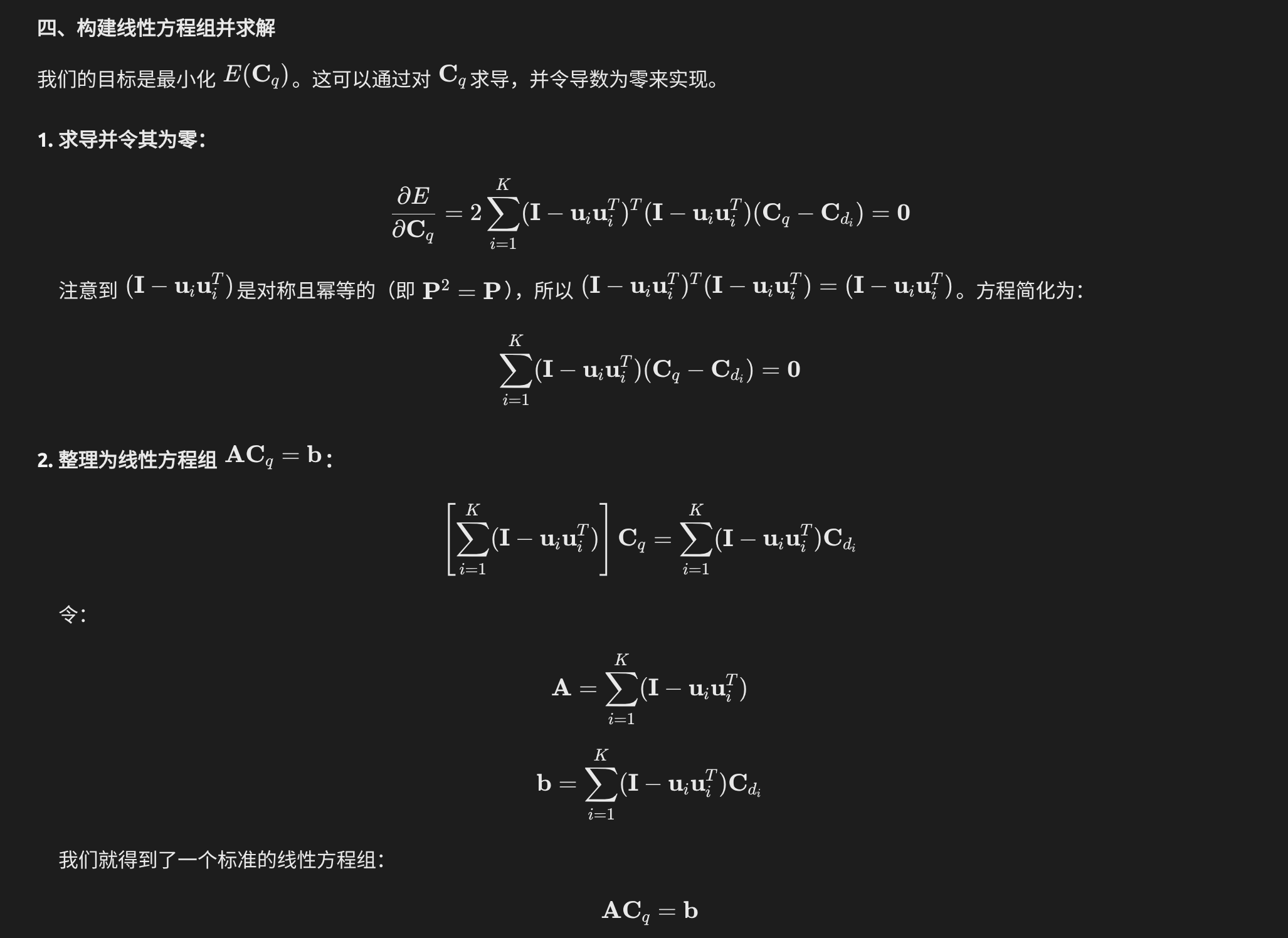
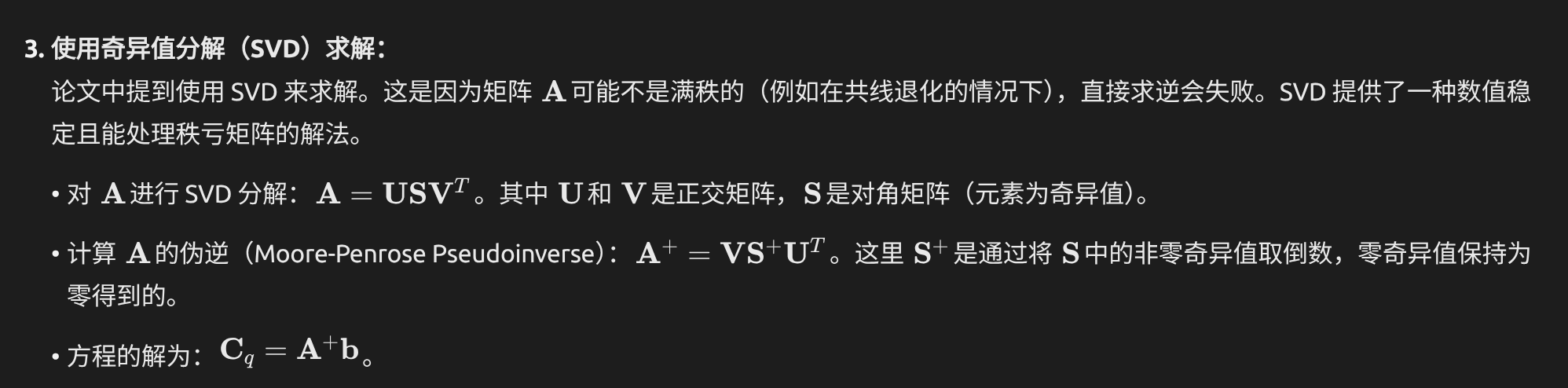
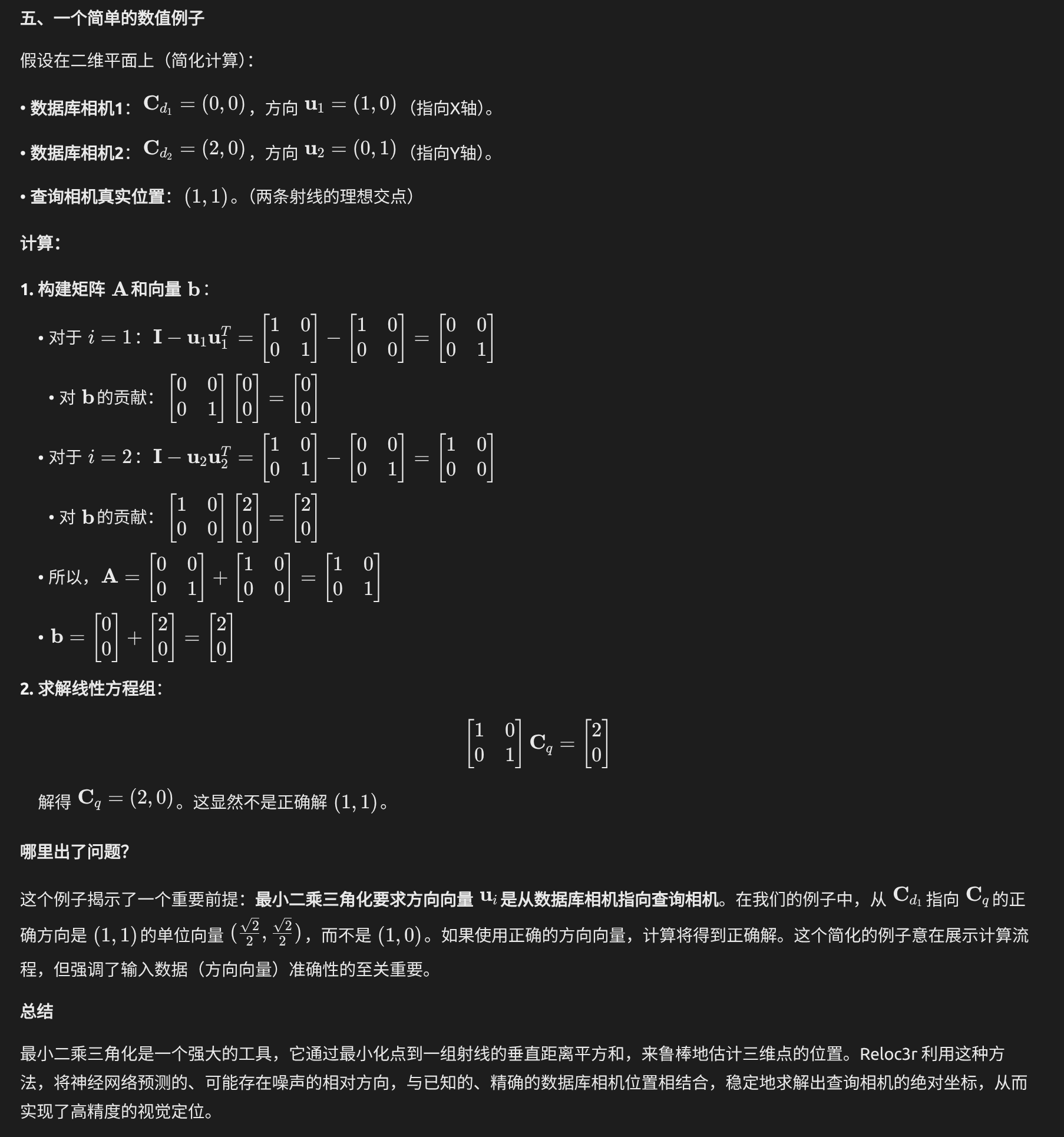
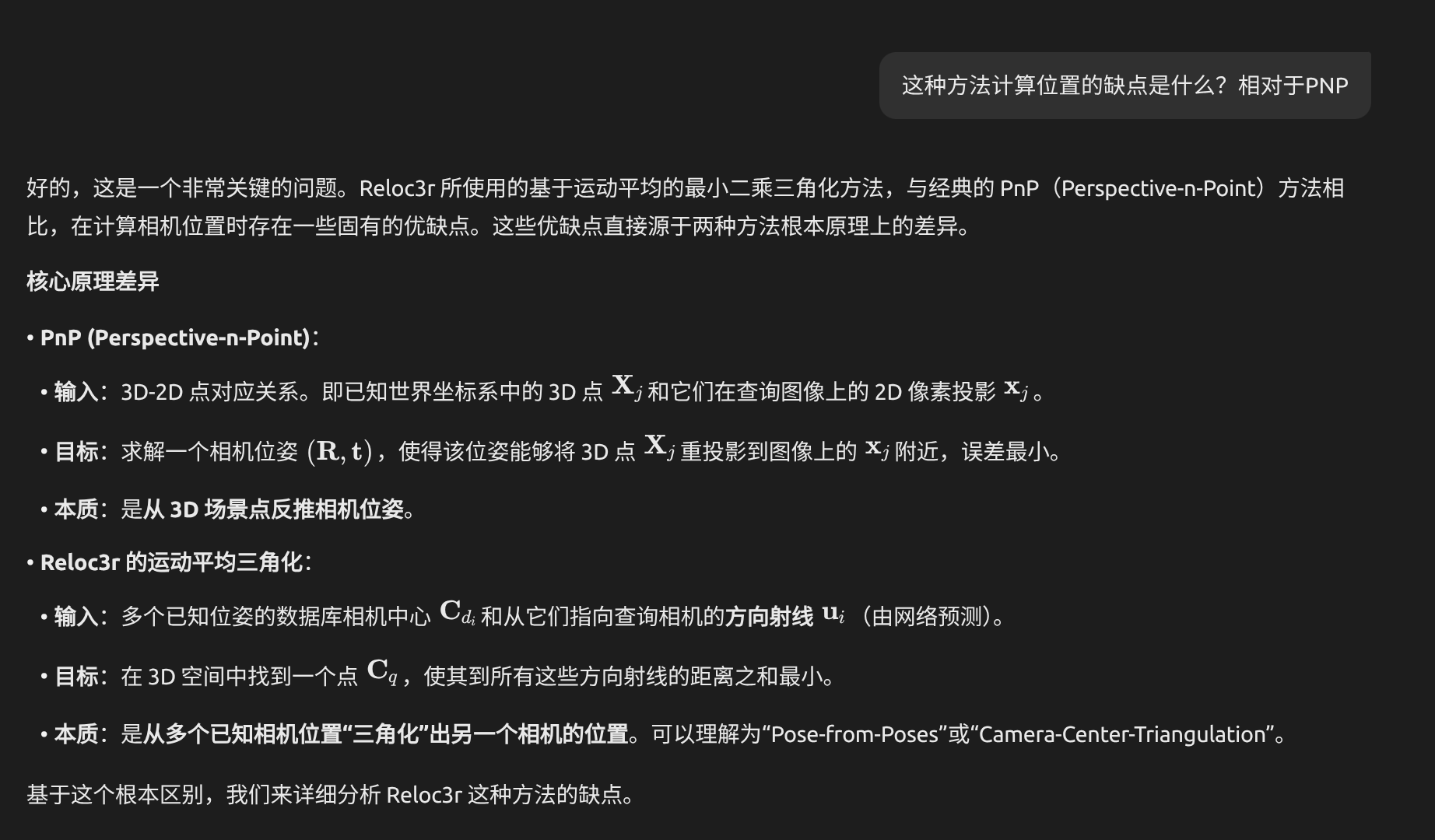
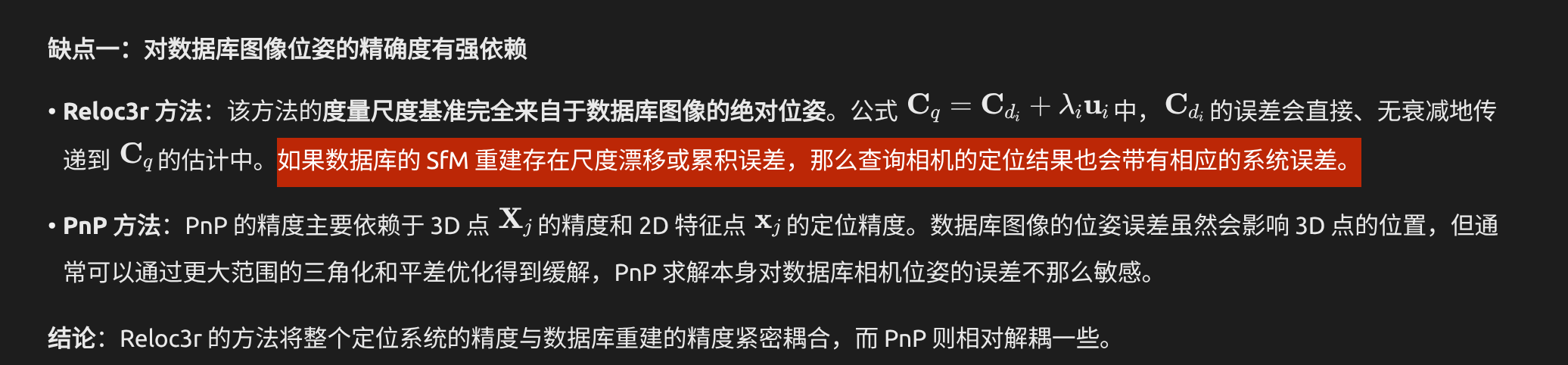
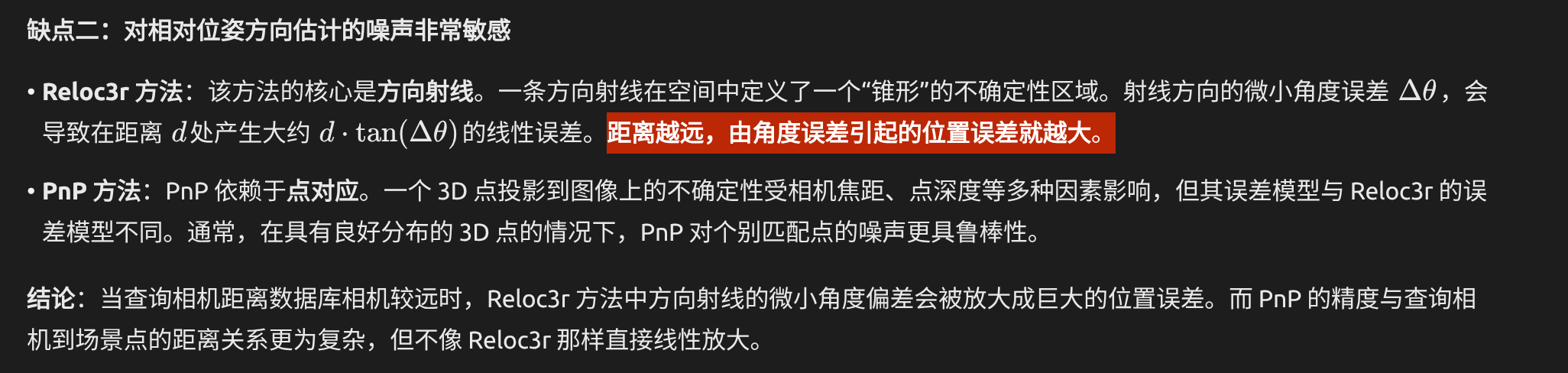
阶段2 利用地图帧集合绝对位姿和最小二乘优化,优化出来t的真实位置,恢复尺度。
关键点:
1 2d-2d 一般是没有尺度的,但是地图点匹配2D-3D 因为光照视角变化匹配失败不能用。
2 这里用最小二乘优化法,避开了尺度的求解。
3 阶段1 就可以被各种算法替换,统一到阶段2在没有尺度下恢复尺度。
4 有一个方法 2个关键帧,通过R和单位t,三角形角度拟合相似比,算出t的尺度,但是只是利用了2帧。
这个Reloc3r阶段2用的优化方法可以用很多个地图帧
5 怎么找到匹配的地图帧集合,尤其是特征点词带模型因为光照失败,使用CosPlace,通过语义查找相似的图像。
https://github.com/gmberton/CosPlace


 浙公网安备 33010602011771号
浙公网安备 33010602011771号