


1 GNSS边定义 添加
1-1 边定义
// GNSS边定义 添加
class G2O_TYPES_SBA_API GNSSConstraint_sRt_Edge : public BaseUnaryEdge<3, Vector3D, VertexSE3Expmap>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
GNSSConstraint_sRt_Edge(){};
GNSSConstraint_sRt_Edge(Eigen::Matrix4d T_VO_to_GNSS_ENU ) : _T_VO_to_GNSS_ENU(T_VO_to_GNSS_ENU) {}
bool read(std::istream &in) {} //no use
bool write(std::ostream &out) const {}// no use
void computeError() {
const VertexSE3Expmap* v = static_cast<const VertexSE3Expmap*>(_vertices[0]);
/*
// 在优化器创建之前
CameraParameters* camera_params = new CameraParameters(fx, Vector2D(cx, cy), 0.0);
camera_params->setId(0); // 给参数分配一个唯一ID
*/
//通过parameter(0)获取相机参数
//const CameraParameters * cam
// = static_cast<const CameraParameters *>(parameter(0));
SE3Quat cam_pose = v->estimate(); // cw-ENU全局坐标 to_homogeneous_matrix
const Eigen::Matrix3d R_cw = cam_pose.rotation().toRotationMatrix(); // 世界到相机
const Eigen::Vector3d t_cw = cam_pose.translation();
const Eigen::Matrix3d R_wc = R_cw.transpose() ;// 相机到世界
const Eigen::Vector3d t_wc = -R_cw.transpose() * t_cw;// 并不是真的世界点坐标
Eigen::Matrix3d R_cw_to_gw =_T_VO_to_GNSS_ENU.block<3, 3>(0, 0); // 包含了尺度
Eigen::Vector3d t_cw_to_gw = _T_VO_to_GNSS_ENU.block<3, 1>(0, 3);//
Eigen::Vector3d t_gw = R_cw_to_gw*t_wc+t_cw_to_gw;// GNSS-ENU全局坐标 enu世界点
_error = _measurement - t_gw ; //_measurement GNSS 真值 调用setmeasurement() 设置 Vector3d
// Vector2D obs(_measurement);
// _error = obs-cam->cam_map(v1->estimate().map(v2->estimate()));
}
// virtual void linearizeOplus() override {
// ::g2o::BaseUnaryEdge<3, Eigen::Vector3d, openvslam::optimize::g2o::se3::shot_vertex>::linearizeOplus();// 继承自动求导
// }
// void linearizeOplus() override {
// // 实现雅可比矩阵计算
// // 这里需要根据误差函数对位姿的导数来实现
// _jacobianOplusXi = Eigen::Matrix<double, 3, 6>::Zero();
// const VertexSE3Expmap* v = static_cast<const VertexSE3Expmap*>(_vertices[0]);
// SE3Quat T = v->estimate();
// // 提取旋转矩阵
// const Eigen::Matrix3d R_cw = T.rotation().toRotationMatrix();
// const Eigen::Matrix3d R_cw_to_gw = _T_VO_to_GNSS_ENU.block<3, 3>(0, 0);
// // 位置误差对位姿的雅可比
// // ∂e/∂ξ = -R_cw_to_gw * R_wc^T
// _jacobianOplusXi.block<3, 3>(0, 0) = -R_cw_to_gw * R_cw.transpose();
// // 位置误差对平移的雅可比
// // ∂e/∂t = R_cw_to_gw
// _jacobianOplusXi.block<3, 3>(0, 3) = R_cw_to_gw;
// }
//CameraParameters * _cam;
public:
Eigen::Matrix4d _T_VO_to_GNSS_ENU = Eigen::Matrix4d::Identity(); // sRt第三方需要用得到的参数 真值Eigen::Matrix4d _T_VO_to_GNSS_ENU; // 真值
};
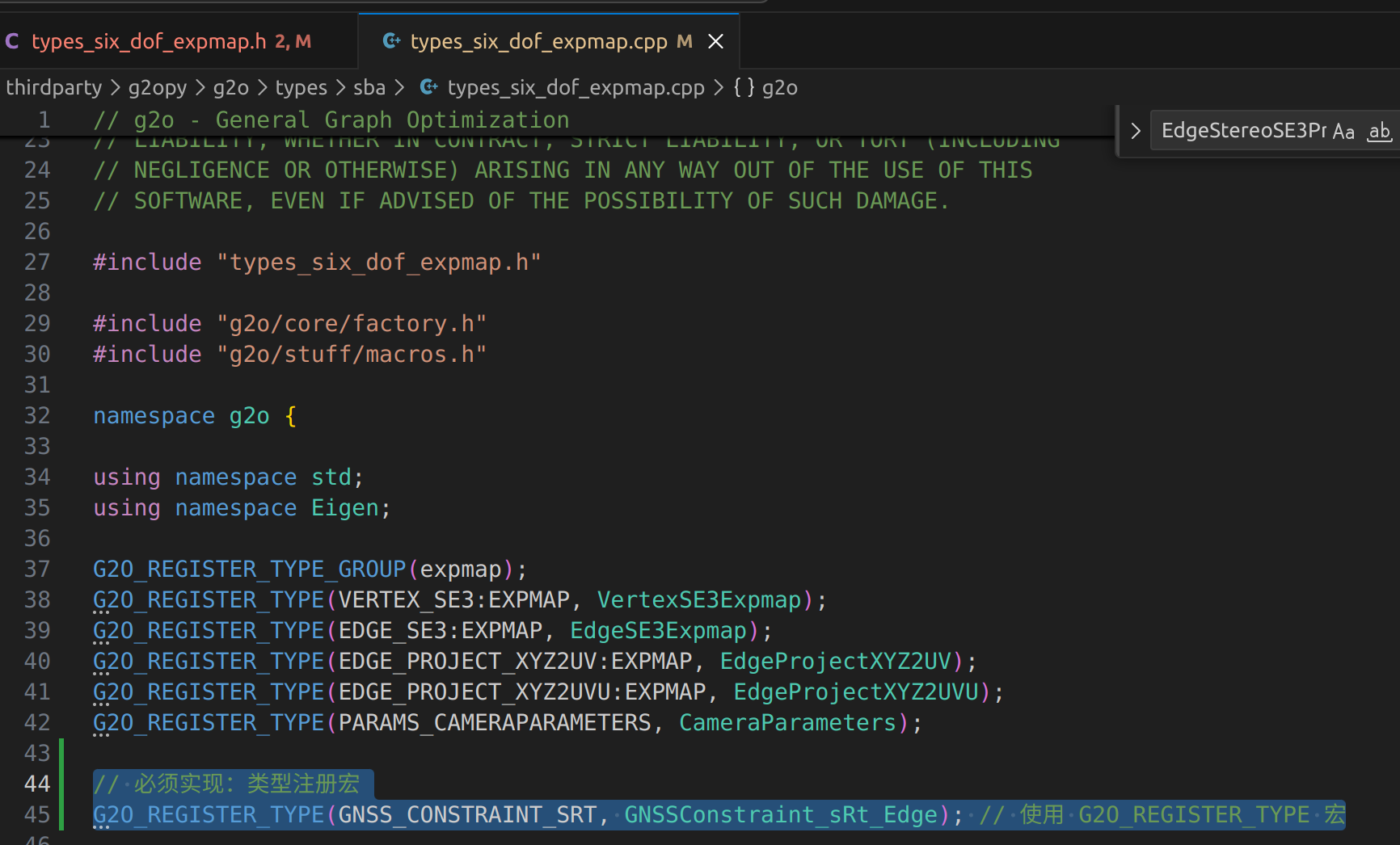
1-2 必须实现:类型注册宏
// 必须实现:类型注册宏 G2O_REGISTER_TYPE(GNSS_CONSTRAINT_SRT, GNSSConstraint_sRt_Edge); // 使用 G2O_REGISTER_TYPE 宏

sudo cp g2o.cpython-311-x86_64-linux-gnu.so /home/r9000k/anaconda3/envs/pyslam/lib/python3.11/site-packages

2 python
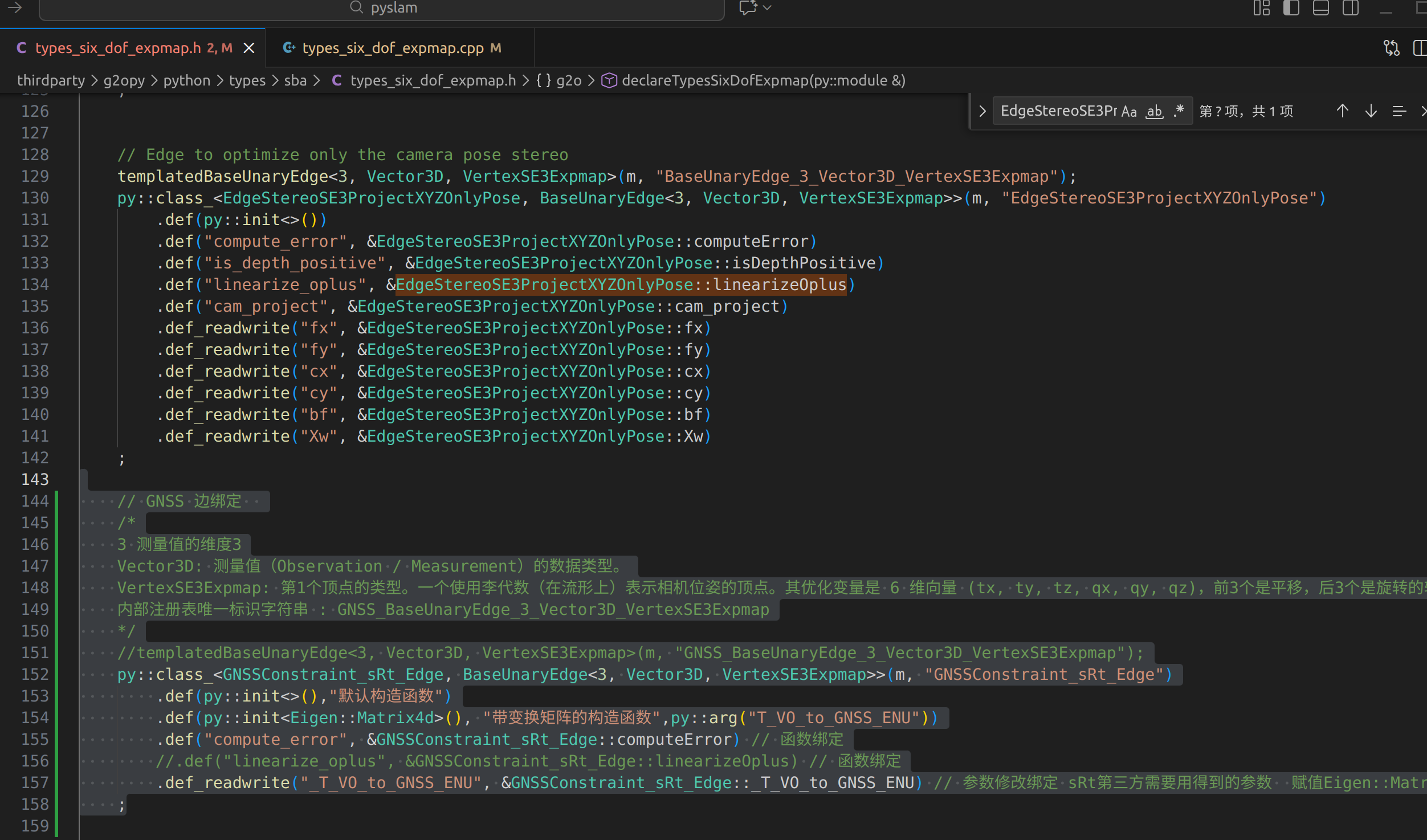
// GNSS 边绑定
/*
3 测量值的维度3
Vector3D: 测量值(Observation / Measurement)的数据类型。
VertexSE3Expmap: 第1个顶点的类型。一个使用李代数(在流形上)表示相机位姿的顶点。其优化变量是 6 维向量 (tx, ty, tz, qx, qy, qz),前3个是平移,后3个是旋转的轴角(或 so(3) 李代数)。这是“相机位姿”。
内部注册表唯一标识字符串 : GNSS_BaseUnaryEdge_3_Vector3D_VertexSE3Expmap
*/
//templatedBaseUnaryEdge<3, Vector3D, VertexSE3Expmap>(m, "GNSS_BaseUnaryEdge_3_Vector3D_VertexSE3Expmap");
py::class_<GNSSConstraint_sRt_Edge, BaseUnaryEdge<3, Vector3D, VertexSE3Expmap>>(m, "GNSSConstraint_sRt_Edge")
.def(py::init<>(),"默认构造函数")
.def(py::init<Eigen::Matrix4d>(), "带变换矩阵的构造函数",py::arg("T_VO_to_GNSS_ENU"))
.def("compute_error", &GNSSConstraint_sRt_Edge::computeError) // 函数绑定
//.def("linearize_oplus", &GNSSConstraint_sRt_Edge::linearizeOplus) // 函数绑定
.def_readwrite("_T_VO_to_GNSS_ENU", &GNSSConstraint_sRt_Edge::_T_VO_to_GNSS_ENU) // 参数修改绑定 sRt第三方需要用得到的参数 赋值Eigen::Matrix4d
;
3 use

# GNSS 自定义引用
#gnss_edge=g2o.GNSSConstraint_sRt_Edge()
T_VO_to_GNSS = np.eye(4)
gnss_edge = g2o.GNSSConstraint_sRt_Edge(T_VO_to_GNSS)
print("初始化参数",gnss_edge._T_VO_to_GNSS_ENU)
T_VO_to_GNSS[0, 0] = 1.1 # 缩放因子
T_VO_to_GNSS[1, 1] = 1.1
T_VO_to_GNSS[2, 2] = 1.1
T_VO_to_GNSS[0, 3] = 10.0 # 平移
T_VO_to_GNSS[1, 3] = 20.0
T_VO_to_GNSS[2, 3] = 30.0
gnss_edge._T_VO_to_GNSS_ENU=T_VO_to_GNSS
print("修改后参数",gnss_edge._T_VO_to_GNSS_ENU)
gnss_edge.set_measurement([1,1,1]) #信息矩阵

 浙公网安备 33010602011771号
浙公网安备 33010602011771号